1
Изобретение относится к области .машиностроения и может быть использовано в конструкциях адаптивных промышленных роботов.
Известна конструкция исполнительного органа робота, содержгицего руку, на конце которой установлен захват с оснащенными тактильными датчиками губками, связанными с корпусом захвата шарнирно-рычажными механизмами , и приводы перемещений 1 .
Недостатком известной конструкции является наличие больших подвижных масс, что приводит к ухудшению быстродействия и динамических характеристик устройства и требует применения довольно приводов.
Цель изобретения - повышение быстродействия и уменьшение подвижных масс. ,,
Это достигается , что в предлагаемом устройстве корпус захвата установлен с возможностью перемещения в поперечном направлении относительно продольной оси руки, а приводы продольного и поперечного перемещений установлены неподвижно относительно руки и кинематически связаны соответственно со средней и одной из крайних рабочих точек пантографа.
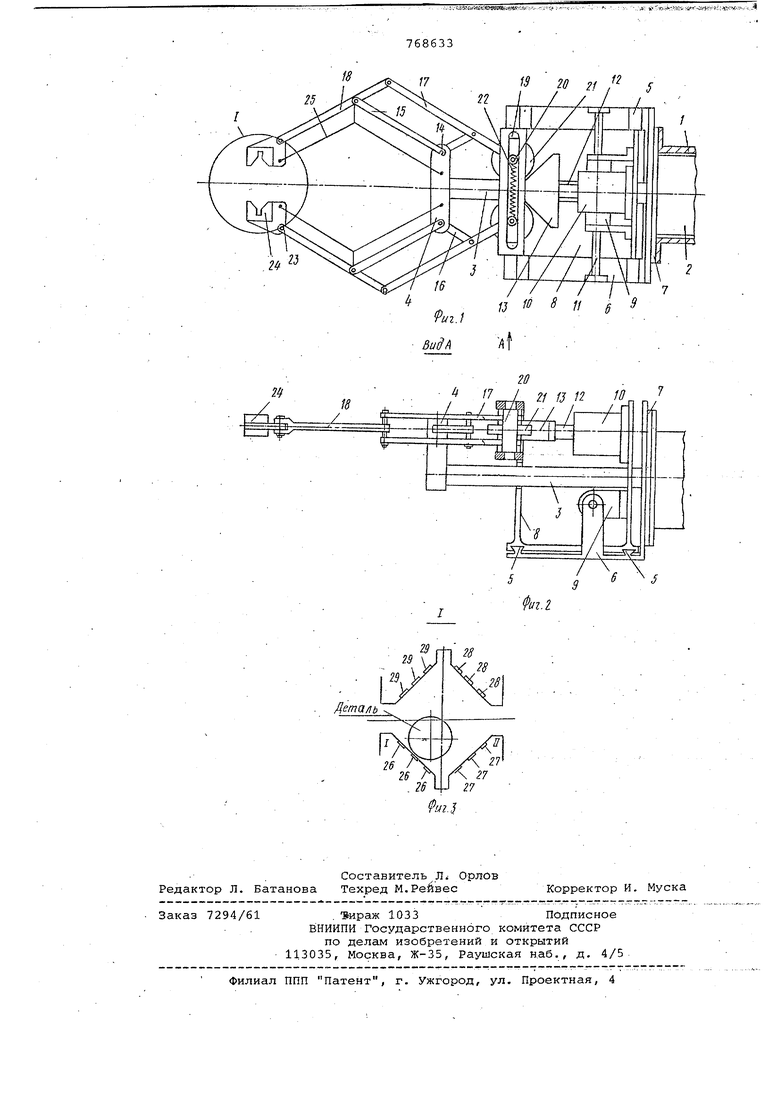
На фиг. 1 показан исполнительный орган, вид сверху, на фиг. 2 - вид по стрелке А на фиг. 1; на фиг.З - узел I на фиг. 1.
5 На конце руки 1 промышленного робота установлен силовой цилиндр, например гидроцилиндр 2, продольного перемещения губок захвата. На штоке 3 гидроцилиндра 2 укреплена серьга 4.
10 В направляющих 5 кронштейна б руки, закрепленного неподвижно на крышке 7 гидроцилиндра 2, установлен корпус 8 захвата. К корпусу захвата жестко крепятся корпус гидроцилиндра 9 поперечного перемещения губок с осью, лежащей в горизонтальной плоскости и перпендикулярной оси гидроцилиндра 2 , и корпус гидроцилиндра 10 сжатия губок с осью, параллельной оси
20 гидроцилиндра 2. Шток 11 гидроцилиндра 9 закреплен на кронштейне 6 руки 1. На внешней части штока 12 гидроцилиндра 10 установлен клин 13. В серьге 4 вставлены две оси 14, с кэж25 дои из которых шармирно связаны поворотные рычаги 15 и 16 четырехзвенных механизмов пантографа, включающих также исходные звенья 17 и замыкающие звенья 18. На концах исходных
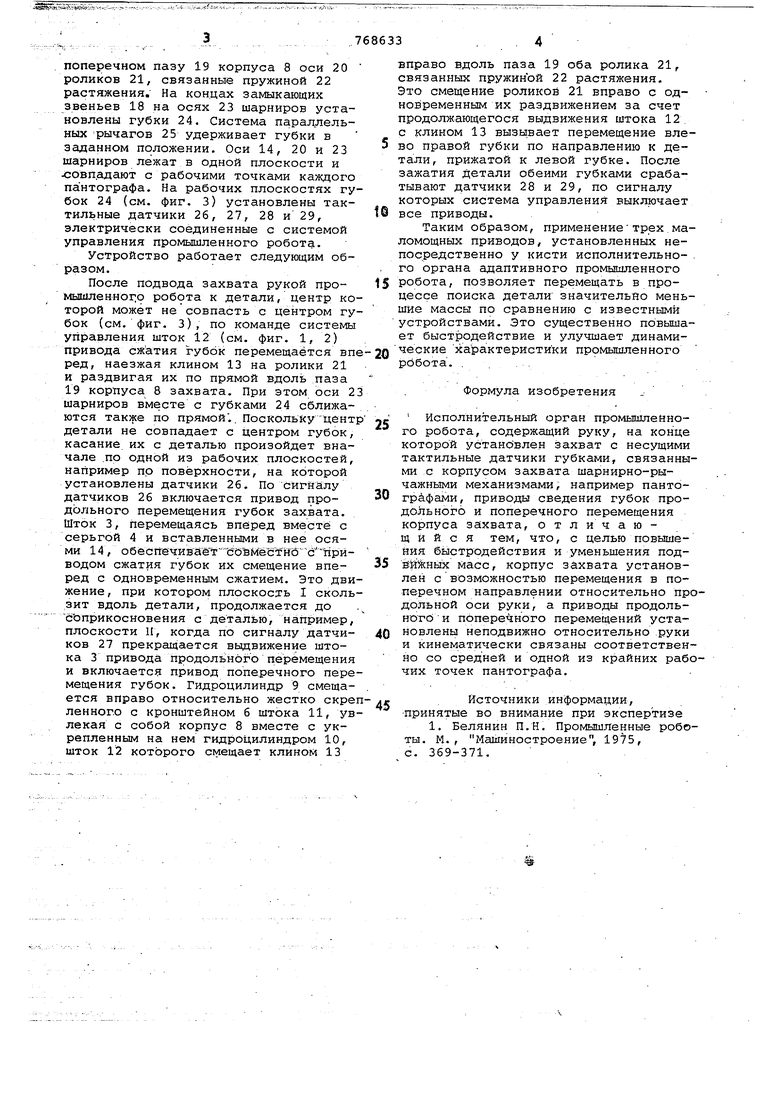
JO звеньев 17 расположены помешонные в поперечном пазу 19 корпуса 8 оси 20 роликов 21, связанные пружиной 22 растяжения. На кондах замыкающих звеньев 18 на осях 23 шарниров установлены губки 24. Система параллельных рычагов 25 удерживает губки в заданном положении. Оси 14, 20 и 23 шарниров лежат в одной плоскости и совп.адают с рабочими точками каждого пантографа. На рабочих плоскостях гу бок 24 (см. фиг. 3) установлены тактильные датчики 26, 27, 28 и 29, электрически соединенные с системой управления промьттпленного роботаУстройство работает следующим образом. После подвода захвата рукой промышленног.о робота к детали, центр ко торой может не совпасть с центром гу бок (см. фиг. 3), по команде системы управления шток 12 (см. фиг. 1, 2) привода сжатия губок перемещается вп ред, наезжая клином 13 на ролики 21 и раздвигая их по прямой вдоль паза 19 корпуса 8 захвата. При этом оси 2 шарниров вместе с губками 24 сближаются также по прямой .. Поскольку цент детали не совпадает с центром губок, касание их с деталью произойдет вначале .по одной из рабочих плоскостей, например п.о поверхности, на которой установлены датчики 26. По сигйалу датчиков 26 включается привод продольного Перемещения губок захвата. Шток 3, перемещаясь вперед вместе с серьгой 4 и вставленными в нее осями 14, обеепечивает сбвМёстно с прйводом сжатия губок их смещение вперед с одновременным сжатием. Это дви жение , при котором плоскость I сколь зит вдоль детали, продолжается до сЪприкосновения с деталью, например, плоскости И, когда по сигналу датчиков 27 Прекращается выдвижение штока 3 привода Продольного перемещения и включается привод поперечного пере мещения губок. Гидроцилиндр 9 смещается вправо относительно жестко скре ленного с кронштейном 6 штока 11, ув лекая с собой корпус 8 вместе с укрепленным на нем гидроЦилиндром 10, шток 12 которого смещает клином 13
768633 вправо вдоль паза 19 оба ролика 21, связанных пружиной 22 растяжения. Это смещение роликов 21 вправо с одновременным их раз движением за счет продолжающегося выдвижения штока 12 с клином 13 вызывает перемещение влево правой губки по направлению к детали, прижатой к левой губке. После зажатия детали обеими губками срабатывают датчики 28 и 29, по сигналу которых система управления выключает все приводы. Таким образом, применениетрех.маломощных приводов, установленных непосредственно у кисти исполнительно- . го органа адаптивного промышленного робота, позволяет перемещать в процессе поиска детали значительно меньшие масса по сравнению с известными устройствами. Это существенно повышает быстродействие и улучшает динамические характеристики промышленного робота. ... Формула изобретения Исполнительный орган промышленного робота, содержащий руку, на конце которой установлен захват с несущими тактильные датчики губками, связанными с корпусом захвата шарнирно-рычажными механизмами, например пантогрйфами, приводы сведения губок продольного и поперечного перемещения корпуса захвата, отличающийся тем, что, с целью повышения быстродействия и уменьшения подвШных масс, корпус захвата установлен с возможностью перемещения в поперечном направлении относительно продольной оси руки, а приводы продольного и поперечного перемещений установлены неподвижно относительно руки и кинематически связаны соответственно со средней и одной из крайних рабочих точек пантографа. Источники информации, принятые во внимание при экспертизе 1. Белянин П.Н. Промышленные роботы. М. , Машиностроение, 1975, с. 369-371.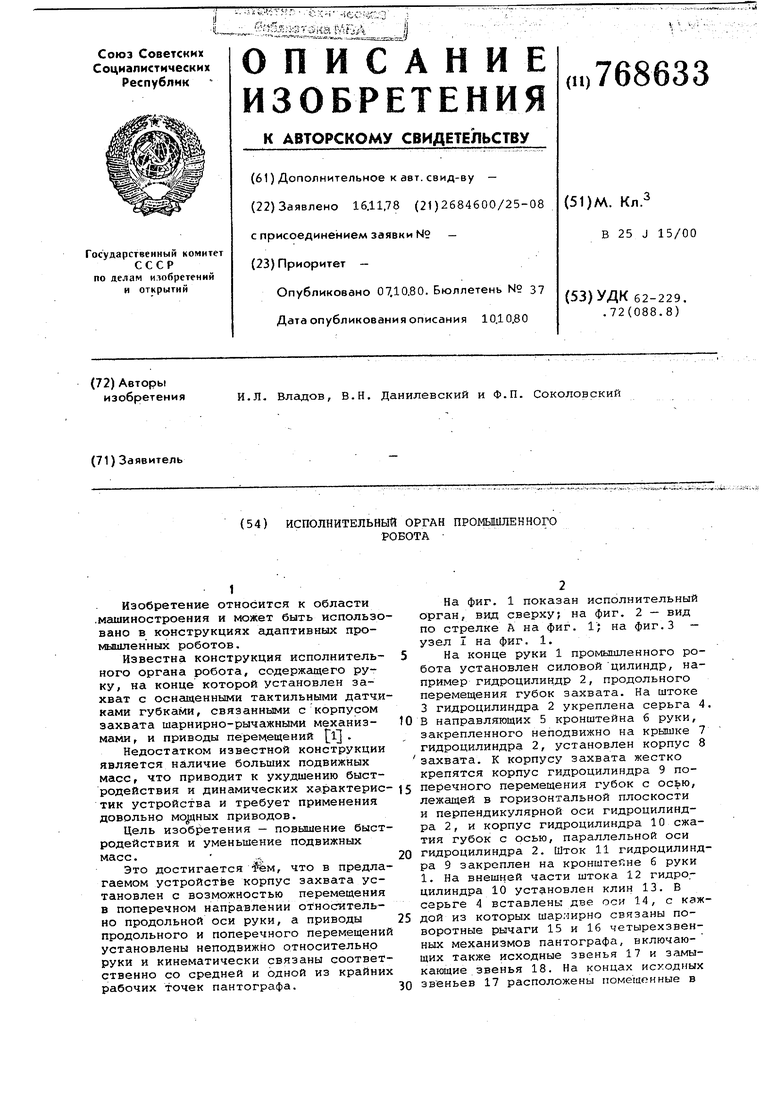
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1977 |
|
SU662342A1 |
| Захват манипулятора | 1977 |
|
SU642151A1 |
| Захват | 1977 |
|
SU663577A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Захват | 1977 |
|
SU667396A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Захват манипулятора | 1978 |
|
SU963849A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Захватное устройство | 1984 |
|
SU1237422A1 |
| Адаптивный схват промышленного робота | 1979 |
|
SU872255A1 |