бидА

| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1987 |
|
SU1426785A1 |
| Манипулирующее устройство | 1981 |
|
SU967799A2 |
| Устройство для управления схватом манипулятора | 1989 |
|
SU1754439A1 |
| Манипулятор | 1991 |
|
SU1813620A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| Копирующий манипулятор | 1983 |
|
SU1093542A2 |
| Устройство для управления перемещением механизма по замкнутой трассе | 1988 |
|
SU1594486A1 |
| МЕХАНИЗМ АВТОМАТИЗИРОВАННОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ | 1991 |
|
RU2015936C1 |
| Измерительная система с автоматическим контролем аналого-цифрового преобразования и блок задания нечувствительности | 1991 |
|
SU1837261A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |

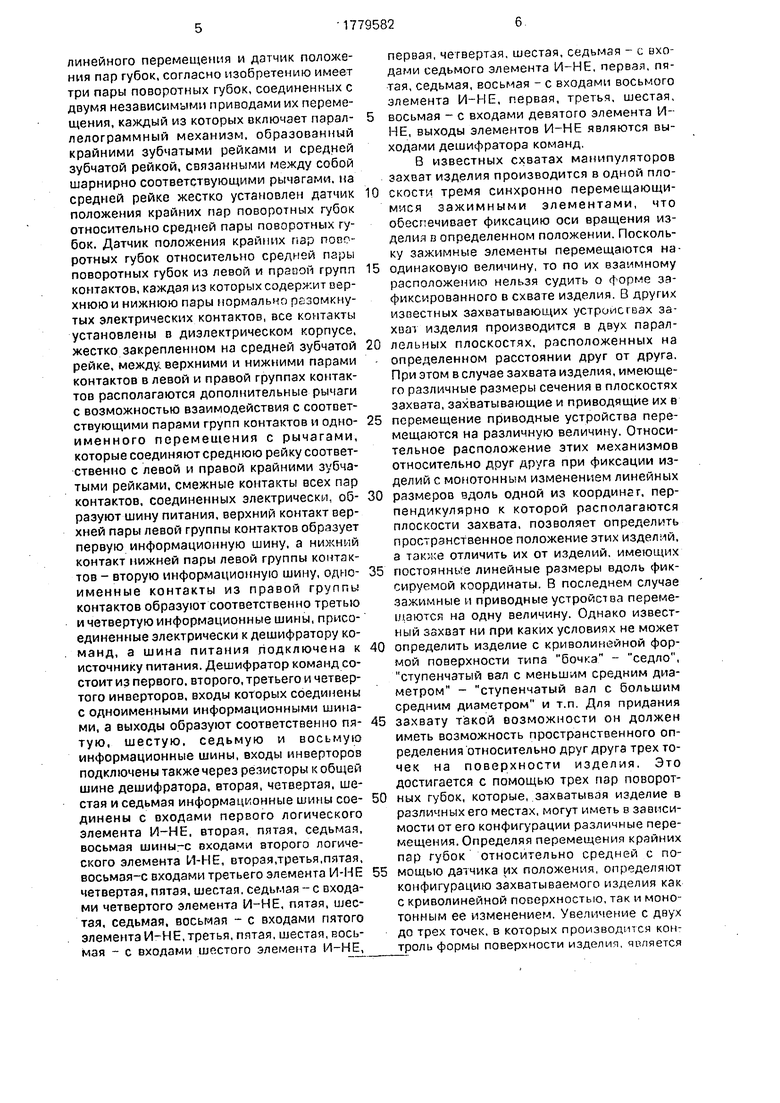
Использование: в машиностроении, а именно в захватах промышленных манипуляторов с автоматическим управлением. Сущность изобретения: захват манипуляторов содержит корпус 1, на котором установлены три пары поворотных губок 2, свободно сидящих на осях 3. жестко закрепленных в корпусе 1. Губки 2 соединены с приводом их перемещения, включающим жестко закрепленные на губках зубчатые секторы 4, входящие попарно в зацепление с зубчатыми рейками 5, крайние из которых шарнир- но связаны со средней рейкой рычагами и образуют с ними два параллелограммных механизма. Рычаги шарнирно связаны с тягами 7 двигателей линейного перемещения. На средней рейке 5 жестко установлен датчик положения крайних пар губок 2 относи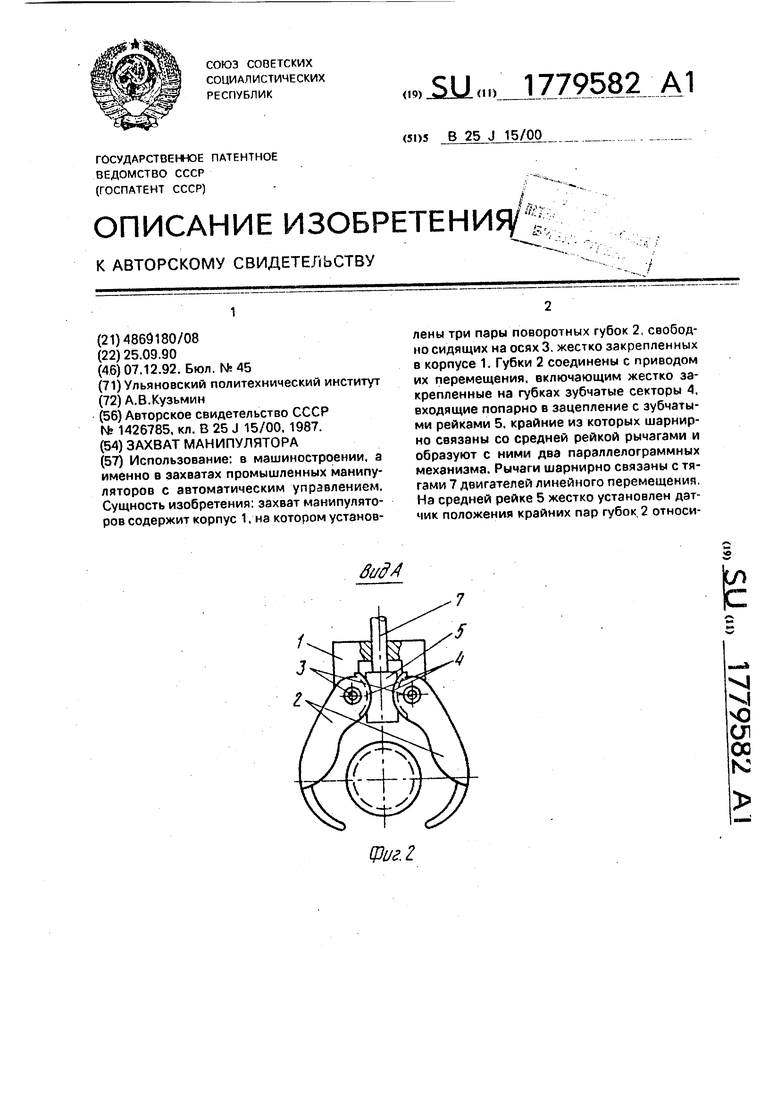
Л
vl ЧЭ
сл
ОС ГС
Щи г. г
тельно средней пары губок 2. Датчик подключен к дешифратору. В зависимости от того, какой формы изделие находится в захвате: выпуклой, вогнутой, типа цилиндра или корпуса, крайние губки 2 сводятся на различные углы, при этом рычаги занимают различное положение: крайними концами вниз, вверх и т.д. Положение рычагов при
Изобретение относится к машиностроению, а именно к захватам промышленных манипуляторов с автоматическим управлением.
Известен концентрический схват, предназначенный для захвата и ориентации цилиндрических объектов различных диаметров, Схват содержит корпус, вдоль которого может перемещаться скользящий блок, в корпусе установлено множество шкивов, между которыми расположен бесконечный ремень, с его боковыми ветвями соединяются боковые пальцы схвата, а центральный палец схвата закрепляется на скользящем блоке.
Недостатком указанного схвата является невозможность захвата изделий конусной, не цилиндрической формы.
Известен также захват механической руки, содержащий три зажимных элемента и привод их перемещения, смонтированные на корпусе захвата и связанные между собой зубчатой передачей, два зажимных элемента выполнены в виде установленных с возможностью вращения и снабженных зубчатыми секторами рычагов, третий зажимной элемент выполнен в виде установленной с возможностью поступательного перемещения зубчатой рейки, а в корпусе захвата имеется окно, размеры которого больше поперечных размеров зажимаемой детали.
Недостатками этого захвата являются невозможность захвата изделий со сложной формой поверхности вращения и отсутствие возможности определения конфигурации этих изделий.
Наиболее близким по технической сущности к изобретению является схват манипулятора, содержащий корпус, на котором установлены две пары поворотных губок, свободно сидящих на осях, жестко закрепленных в корпусе, губки соединены с приводом их перемещения, включающим жестко закрепленные на губках зубчатые секторы, входящие попарно в зацепление с зубчатыми рейками, связанными между собой рычазахвате изделий фиксируется датчиком, его сигналы поступают на дешифратор, на выходе которого формируются сигналы, определяющие форму изделия при продольной несимметричности его пространственное положение, например конус малым диаметром вправо или влево. 2 з.п. ф-лы, 4 ил., 1 табл.
гами и образующими с ними паралле- лограммный механизм, рычаги шарнир- но связаны с тягой двигателя линейного перемещения, привод устройства соединен
с датчиком положения пар губок относительно друг друга, датчик состоит из двух пар, например, нормально разомкнутых контактов, установленных в диэлектрическом корпусе, который закреплен на одном
из рычагов, между парами контактов располагается дополнительный рычаг, свободно сидящий на оси, установленной жестко в корпусе датчика, рычаг находится в зацеплении с толкателем, жестко связанным с
шарниром, соединяющим рычаг, на котором закреплен датчик, и тягу привода схвата.
Однако это устройство хотя и позволяет захватывать изделия с монотонным изменением линейных размеров вдоль фиксируемой захватом координаты изделия и определять их форму, например цилиндров и конусов или ступенчатых валов, брусков и пирамид, но не позволяет выполнить указанные операции в отношении изделий более сложной конфигурации с вогнутой или выпуклой поверхностью, т.е. бочка, седло и других поверхностей этого типа.
Цель изобретения - расширение функциональных возможностей за счет опрёдепения конфигурации захватываемых объектов не только с монотонным изменением формы поверхности вдоль захватываемой координаты объекта, но и с криволинейной поверхностью типа бочка,
седло и других поверхностей этого типа. Цель достигается тем, что захват манипулятора, содержащий корпус, на котором установлены пары поворотных губок, свободно сидящие на осях, жестко закрепленных в корпусе, губки, соединенные приводом их перемещения, включающим жестко закрепленные на губках зубчатые секторы, входящие попарно в зацепление с зубчатыми рейками, связанными между собой шарнирно рычагами и образующими с ними параллелограммный механизм, рычаги шарнирно связаны с тягой двигателей
линейного перемещения и датчик положения пар губок, согласно изобретению имеет три пары поворотных губок, соединенных с двумя независимыми приводами их перемещения, каждый из которых включает парал- лелограммный механизм, образованный крайними зубчатыми рейками и средней зубчатой рейкой, связанными между собой шарнирно соответствующими рычагами, на средней рейке жестко установлен датчик положения крайних пар поворотных губок относительно средней пары поворотных губок. Датчик положения крайних пар поворотных губок относительно средней пары поворотных губок из левой и правой групп контактов, каждая из которых содержит верхнюю и нижнюю пары нормально резомкну- тых электрических контактов, все контакты установлены в диэлектрическом корпусе, жестко закрепленном на средней зубчатой рейке, между, верхними и нижними парами контактов в левой и правой группах контактов располагаются дополнительные рычаги с возможностью взаимодействия с соответствующими парами групп контактов и одно- именного перемещения с рычагами, которые соединяют среднюю рейку соответственно с левой и правой крайними зубчатыми рейками, смежные контакты всех пар контактов, соединенных электрически, образуют шину питания, верхний контакт верхней пары левой группы контактов образует первую информационную шину, а нижний контакт нижней пары левой группы контактов - вторую информационную шину, одио- именные контакты из правой группы контактов образуют соответственно третью и четвертую информационные шины, присоединенные электрически к дешифратору ко- манд, а шина питания подключена к источнику питания. Дешифратор команд состоит из первого, второго, третьего и четвертого инверторов, входы которых соединены с одноименными информационными шинами, а выходы образуют соответственно пятую, шестую, седьмую и восьмую информационные шины, входы инверторов подключены также через резисторы к общей шине дешифратора, вторая, четвертая, шестая и седьмая информационные шины соединены с входами первого логического элемента И-НЕ. вторая, пятая, седьмая, восьмая шины-с входами второго логического элемента И-НЕ, вторая.третья,пятая, восьмая-с входами третьего элемента И-НЕ четвертая, пятая, шестая, седьмая - с входами четвертого элемента И-НЕ, пятая, шестая, седьмая, восьмая - с входами пятого элемента И-НЕ, третья, пятая, шестая, восьмая - с входами шестого элемента И-НЕ,
первая, четвертая, шестая, седьмая - с входами седьмого элемента И-НЕ, первая, пятая, седьмая, восьмая - с входами восьмого элемента И-НЕ, первая, третья, шестая, 5 восьмая - с входами девятого элемента И-НЕ, выходы элементов И-НЕ являются выходами дешифратора команд,
В известных схватах манипуляторов захват изделия производится в одной пло0 скости тремя синхронно перемещающимися зажимными элементами, что обеспечивает фиксацию оси вращения изделия в определенном положении. Поскольку зажимные элементы перемещаются на5 одинаковую величину, то по их взаимному расположению нельзя судить о форме зафиксированного в схваге изделия. В других известных захватывающих устройствах за- хват. изделия производится в двух парал0 лельных плоскостях, расположенных на - определенном расстоянии друг от друга. При этом в случае захвата изделия, имеющего различные размеры сечения в плоскостях захвата, захватывающие и приводящие их в
5 перемещение приводные устройства перемещаются на различную величину. Относительное расположение этих механизмов относительно друг друга при фиксации изделий с монотонным изменением линейных
0 размеров вдоль одной из координат, перпендикулярно к которой располагаются плоскости захвата, позволяет определить пространственное положение этих изделий, а также отличить их от изделий, имеющих
5 постоянные линейные размеры вдоль фиксируемой координаты. В последнем случае зажимные и приводные устройства перемешаются на одну величину. Однако известный захват ни при каких условиях не может
0 определить изделие с криволинейной формой поверхности типа бочка - седло, ступенчатый вал с меньшим средним диаметром - ступенчатый вал с большим средним диаметром и т.п. Для придания
5 захвату такой возможности он должен иметь возможность пространственного определения относительно друг друга трех точек на поверхности изделия. Это достигается с помощью трех пар поворот0 ных губок, которые, захватывая изделие в различных его местах, могут иметь в зависимости от его конфигурации различные перемещения. Определяя перемещения крайних пар губок относительно средней с по5 мощью датчика их положения, определяют конфигурацию захватываемого изделия как с криволинейной поверхностью, так и монотонным ее изменением. Увеличение с двух до трех точек, в которых производится контроль формы поверхности изделия, является
принципиальным отличием предлагаемого захвата от известного, обеспечивающим качественный скачок функциональных возможностей захвата. Причем конструкция датчика положений пар губок чрезвычайно проста и содержит всего четыре пары электрических контактов, состояние, которых определяется с помощью элементарной логической схемы, содержащей девять четы- рехвходовых элемента И-НЕ. Указанная отличительная особенность работы предлагаемого захвата не использовалась ранее и не используется сейчас в механизмах подобного типа для определения формы изделий из отмеченной номенклатуры.
Таким образом, характеризующие предлагаемый захват манипулятора отличия являются существенными и позволяют достичь цели изобретения.
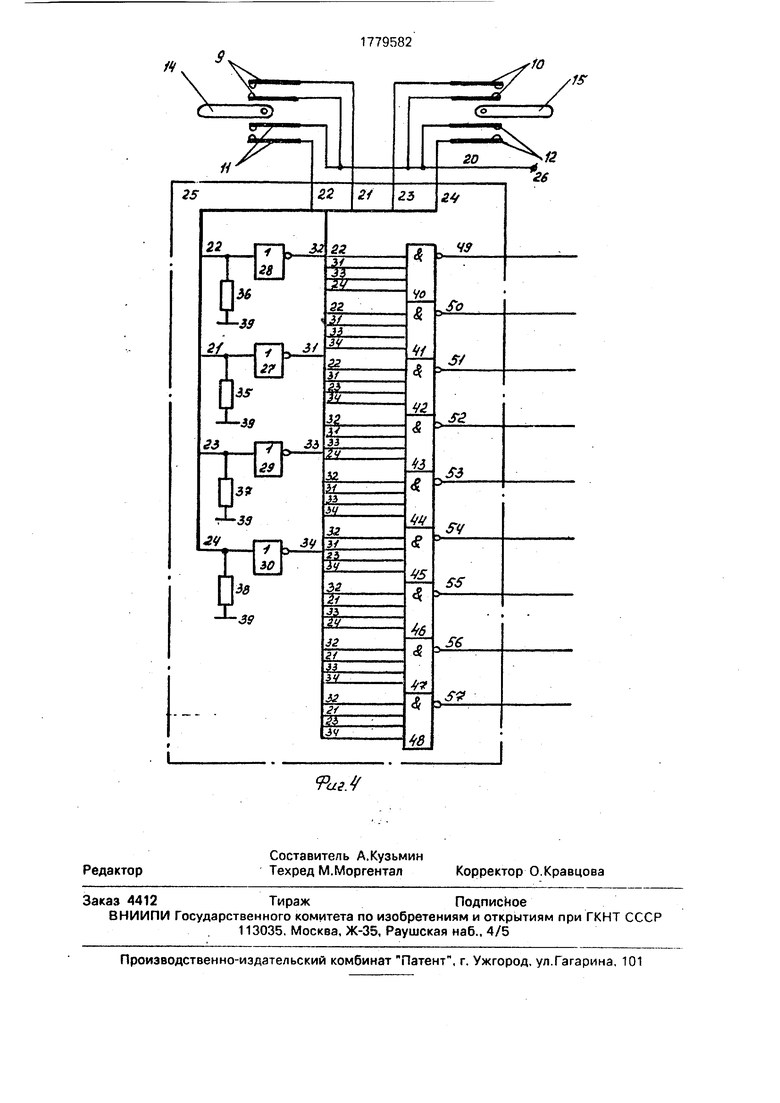
На фиг. 1 изображен захват манипулятора, общий вид; на фиг. 2 - вид А на фиг. 1 ; фиг. 3 - узел I на фиг. 1; на фиг. А - принципиальная схема дешифратора команд с подключенным к нему датчиком положений губок.
Захват манипулятора содержит корпус 1, на котором установлены три пары поворотных губок 2, свободно сидящих на осях 3, жестко закрепленных в корпусе 1. Губки 2 соединены с приводом их перемещения, включающим жестко закрепленные на губках 2 зубчатые секторы 4, входящие попарно в зацепление с зубчатыми рейками 5, крайние из которых шарнирно связаны со средней рейкой рычагами б и образуют с ними два параллелограммных механизма. Рычаги б шарнирно связаны с тягами 7 двигателей линейного перемещения (на фигурах не показаны). На средней рейке 5 жестко установлен датчик 8 положения крайних пар губок 2 относительно средней пары губок 2. Датчик 8 состоит, например, из левой и правой групп контактов, каждая из которых содержит верхнюю соответственно 9, 10 и нижнюю соответственно 11,12 пары нормально разомкнутых электрических контактов. Все контакты установлены в диэлектрическом корпусе 13, жестко закрепленном на средней зубчатой рейке 5. Между верхними и нижними парами контактов 9 и 11, 10 и 12 левой и правой групп контактов располагаются дополнительные рычаги 14,15 соответственно. Дополнительные рычаги 14, 15 имеют возможность взаимодействия с соответствующими парами контактов 9и 11, 10и 12и одноименного и одновременного перемещения с рычагами 6, соединяющими среднюю рейку 5 соответственное левой и правой крайними рейками 5, так как одним концом дополнительные
рычаги 14,15 шарнирно закреплены на осях 16, 17. которые жестко связаны с корпусом 13, а другим концом дополнительные рычаги находятся в вильчатых толкателях 18, 19.
жестко закрепленных на рычагах 6,
Смежные контакты пар 9-12, соединенные электрически, образуют шину 20 питания, верхний контакт пары 9 - первую 21, нижний контакт пары 11 - вторую 22. верх0 ний контакт пары 10 - третью 23, а нижний контакт пары 12 - четвертую 24 информационную шину. Информационные шины присоединены электрически .к дешифратору 25 команд, а шина питания - к источнику 26
5 напряжения.
Дешифратор 25 состоыт из первого 27, второго 28, третьего 29 и четвертого 30 инверторов, входы которых соединены соответственно с информационными шинами
0 21, 22, 23, 24, а выходы образуют соответственно пятую 31, шестую 32. седьмую 33 и восьмую 34 информационные шины. Входы инверторов 27, 28, 29, 30 подключены через соответствующие резисторы 35, 36, 37, 38 к
5 общей шине 39 дешифратора. Информационные шины 22, 24, 31, 33 соединены с входами первого элемента И-НЕ 40, шины 22,
31,33, 34 - с входами второго элемента И-НЕ 41, шины 22, 23, 31, 34 - с входами
0 третьего элемента И-НЕ 42. шины 24,31,32, 33 - с входами четвертого элемента И-НЕ 43, шины 31. 32, 33, 34 - с входами пятого элемента И-НЕ 44, шины 23, 31, 32, 34 - с входами шестого элемента И-НЕ 45, шины
5 21, 24, 32 33 - с входами седьмого элемента И-НЕ 36, шины 21, 32, 33, 34 - с входами восьмого элемента И-НЕ 47. шины 21, 23,
32,34 - с входами девятого элемента И-НЕ 48. Выходы элементов И-НЕ 40,41, 42, 43,
0 44, 45, 46, 47, 48 являются соответственно выходами 49, 50, 51. 52, 53, 54. 55, 56, 57 дешифратора 25.
Захват манипулятора работает следующим образом.
5 При захвате изделия, находящегося между губками 2, тяги 7 перемещают вверх относительно корпуса 1. Вместе с тягой 7 перемещают вверх рычаги 6 и рейки 5. Поскольку рейки 5 находятся в зацеплении с
0 секторами 4, то последние совместно с губками 2 поворачиваются на осях 3, обеспечивая захват изделия.
Профиль губок 2 выбран так, что обеспечивает не только захват круглых тел враще5 ния, типа конус или ступенчатый вал, но и центрирование их в определенном диапазоне диаметров. Захват изделий, имеющих в плоскостях захвата губок различный диаметр, обеспечивается сведением губок 2 до этого диаметра, что выполняется с помощью
перекашивания левого и правого паралле- лограммных механизмов, образованных рычагами 6 и соответственно левой и средней, правой и средней рейками совместно с тягами 7. Так, например, в случае захвата ступенчатого вала (фиг. 1) левые и правые губки 2 сводятся на больший угол, чем средние губки 2, что обеспечивается переносом па- раллелограммных механизмов. При этом в левом параллелограммном механизме опускаются левые концы рычагов 6, а в правом
-правые концы рычагов 6. Вильчатые толкатели 18, 19, перемещаясь вместе с рычагами 6 вниз, переводят в нижнее положение и дополнительные рычаги 14, 15 датчика 8 (фиг. 3, 4), которые замыкают пары контактов 11, 12 и на шинах 22, 24 появляется напряжение, равное напряжению логической 1, от источника 26 напряжения. На шинах 21, 23 в этом случае присутствует напряжение логического О, так как пары контактов 9, 10 разомкнуты, и эти шины не соединены с источником 26, а входы инверторов 27, 29, с которыми они соединены, подключены через резисторы 35,37 небольшого номинала (1 к) к о.бщей шине 39 дешифратора 25 команд. На выходах инверторов 27, 29 при этом формируется напряжение логической 1, а выходах инверторов 28,30
-логического О. Поскольку к входам логического элемента И-НЕ 40 подключены шины 22. 31. 33. 24, на которых присутствует напряжение логической 1, то на выходе этого элемента формируется напряжение логического О. На всех остальных логических элементах 41-48 формируется напряжение логической 1, поскольку хотя бы на одной из шин, соединенных с этими элементами, присутствует напряжение логического О. Таким образом, если в захвате находится изделие типа ступенчатый валик со средним меньшим диаметром и крайними диаметрами, большими и равными между собой, на выходной шине 49 дешифратора команд формируется напряжение логического О, а на всех его остальных выходных шинах формируется напряжение логической Г. При захвате изделий другой формы захват работает аналогично, отличие состоит лишь в том, что в зависимости от формы изделий рычаги 6 и соответственно дополнительные рычаги 14, 15 принимают различные положения, указанные в таблице условий формирования выходных сигналов дешифратора команд захвата.
Таким образом, на выходе дешифратора команд захвата формируются сигналы, определяющие конфигурацию и пространственное положение изделий с вогнутой и выпуклой формой поверхности, а также с
монотонным изменением линейных размеров вдоль фиксируемой захватом координаты изделия, например деталей с поверхностью типа седло, бочка, ступенчатый валик 5 различной конфигурации и конусно-цилиндрической формы (см. таблицу).
Использование изобретения по сравнению с известными аналогичными устройствами обеспечивает повышение автоматизации
0 сборочных операций, процессов металлообработки, способствует более полной автоматизации гибких производственных систем и производств, дает возможность производить автоматически сортировку изделий с по-
5 мощью несложных технических средств по сложным гибким программам.
Технико-экономическая эффективность изобретения оценивается по сравнению с захватом роботов MarKII-MarKll-FLR (изго0 товитель США) и Универсал-15 (изготовитель СССР) (базовый объект), являющимися наиболее прогрессивными и близкими по технической сущности к заявляемому устройству. Расширение функциональных воз5 можностей указанных роботов, т.е. придание им возможности определять конфигурацию и пространственное положение захватываемых объектов из достаточно обширной заданной номенклатуры, позволяет
0 расширить область их применения и организовать с помощью указанных роботов ряд новых технологических операций. Так, например, эти роботы могут обслуживать многоцелевые и токарные станки при доставке
5 к ним в таре неориентированных заготовок. что повышает степень автоматизации и исключает ряд ручных операций при изготовлении деталей и повышает производительность работы гибких автоматизированных участков
0 металлообработки. В составе этих участков роботы, оснащенные предлагаемым захватом, производят автоматически сортировку заготовок с одновременной их ориентацией и распределением по обрабатывающему обо5 рудованию. Предварительный расчет экономического эффекта от внедрения предлагаемого захвата на роботах, входящих в состав гибкого автоматизированного участка машиностроительного производства, показы0 вает, что за счет расширения функциональных возможностей роботов типа Универсал-15 достигается годовой экономический эффект 159 руб. на единицу оборудования. Экспериментальные исследования описанного захвата
5 показывают его хорошую работоспособность и технологичность при изготовлении.
Формула изобретения 1. Захват манипулятора, содержащий корпус, на котором установлены пары поворотных губок, шарнирно закрепленных на осях в корпусе, при этом губки соединены с приводом их перемещения, включающим жестко закрепленные на губках зубчатые сектора, входящие попарно в зацепление с зубчатыми рейками, связанными между собой шарнирно рычагами и образующими с ними параллелограммный механизм, а рычаги шарнирно связаны тягой с приводом, и датчик положения пар губок, отличающийся тем, что, с целью расширения функциональных возможностей за счет определения конфигурации и пространственного расположения захватываемых объектов, имеющих вогнутую и выпуклую поверхности, он снабжен дополнительной парой поворотных губок, шарнирно закрепленных в корпусе и связанных через зубчатые секторы с зубчатой рейкой, смонтированной на рычагах, образующих с соседней рейкой параллелограммный механизм, а рычаги шарнирно связаны тягой со своим приводом, при этом на средней рейке жестко установлен датчик положения крайних пар поворотных губок относительно средней пары поворотных губок. 2. Захват поп, 1,отличающийся тем, что датчик положения крайних пар поворотных губок относительно средней пары поворотных губок состоит из левой и правой групп контактов, каждая из которых содержит верхнюю и нижнюю пары нормально разомкнутых электрических контактов, при этом все контакты установлены в диэлектрическом корпусе, жестко закрепленном на средней зубчатой рейке, а между верхними и нижними парами контактов левой и правой групп контактов расположены дополнительные рычаги с возможностью взаимодействия с соответствующими парами групп контактов и одноименного и одновременного перемещения с рычагами, которые соединяют среднюю рейку соответственно с левой и правой крайними зубчатыми рейками, причем
смежные контакты всех пар контактов, соединенные электрически, образуют шину питания, при этом верхний контакт верхней пары левой группы контактов образует первую информационную шину, а нижний контакт нижней пары левой группы контактов - вторую информационную шину, кроме того, одноименные контакты из правой группы контактов образуют соответственно третью
и четвертую информационные шины, присоединенные электрически к дешифратору команд, а шина питания подключена к источнику напряжения.
шестую, седьмую и восьмую информационные шины, при этом входы инверторов подключены также через резисторы к общей шине дешифратора, а вторая, четвертая, шестая и седьмая информационные шины соединены с входами первого логического элемента И-НЕ, вторая, пятая, седьмая, восьмая шины - с входами второго логического элемента И-НЕ, вторая, третья, пятая, восьмая -с входами третьего логического элемента И-НЕ, четвертая, пятая, шестая, седьмая, восьмая - с входами четвертого логического элемента И-НЕ, пятая, шестая, седьмая, восьмая - с входами пятого логического элемента И-НЕ, третья, пятая, шестая, восьмая
- с входами шестого логического элемента И-НЕ, первая, четвертая, шестая, седьмая - с входами седьмого логического элемента И- НЕ, первая, пятая, седьмая, восьмая - с входами восьмого логического элемента И-НЕ,
первая, третья, шестая,восьмая-с входами девятого логического элемента И-НЕ, выходы элементов И-НЕ являются выходами дешифратора команд.
Фиг.1
18 ft 9
16
Pi/гЗ
8
6 W
19
15
К
| Схват манипулятора | 1987 |
|
SU1426785A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
