2. Рука манипулятора, содержащая основание и расположенньш на нем корпус, а также кисть со схватом, установленные в корпусе руки с возможностью изменения своего Положения посредством соответствующих приводов, включающих в себя двигатели и волновые редукторы, гибкие колеса которых связаны размещенными в корпусе руки коаксиальными валами с кистью и схватом, а генераторы волн связаны с соответствующими двигателями, отличающаяся тем, что, с целью упрощения программы управления и расширения технологических возможностей путём кинематической развязки ориентирующих
199608
степеней подвижности и обеспечения установки кистей с различными сочетаниями степеней подвижности, она снабжена жестко связанными с корпусом руки и с жестким колесом волнового редуктора привода кисти зубчатыми колесами, а также блоком зубчатых колес, жестко связанным с гибким колесом волнового редуктора привода руки, при этом одно зубчатое колесо этого блока входит в зацепление с зубчатым колесом, закрепленным на жестком колесе волнового редуктора привода кисти, а другое кинематически связано с зубчатым колесом, жестко связанным с корпусом руки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1983 |
|
SU1151447A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Рука манипулятора | 1982 |
|
SU1007963A1 |
| Промышленный робот | 1987 |
|
SU1481057A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |

Изобретение относится к машиностроению и может быть использовано при создании промышленных роботов.
Целью изобретения является упрощение программы управления и расширение технологических возможностей путем кинематической развязки ориентирующих степеней подвижности и обеспечения установки кистей с различными сочетаниями степеней подвижности.
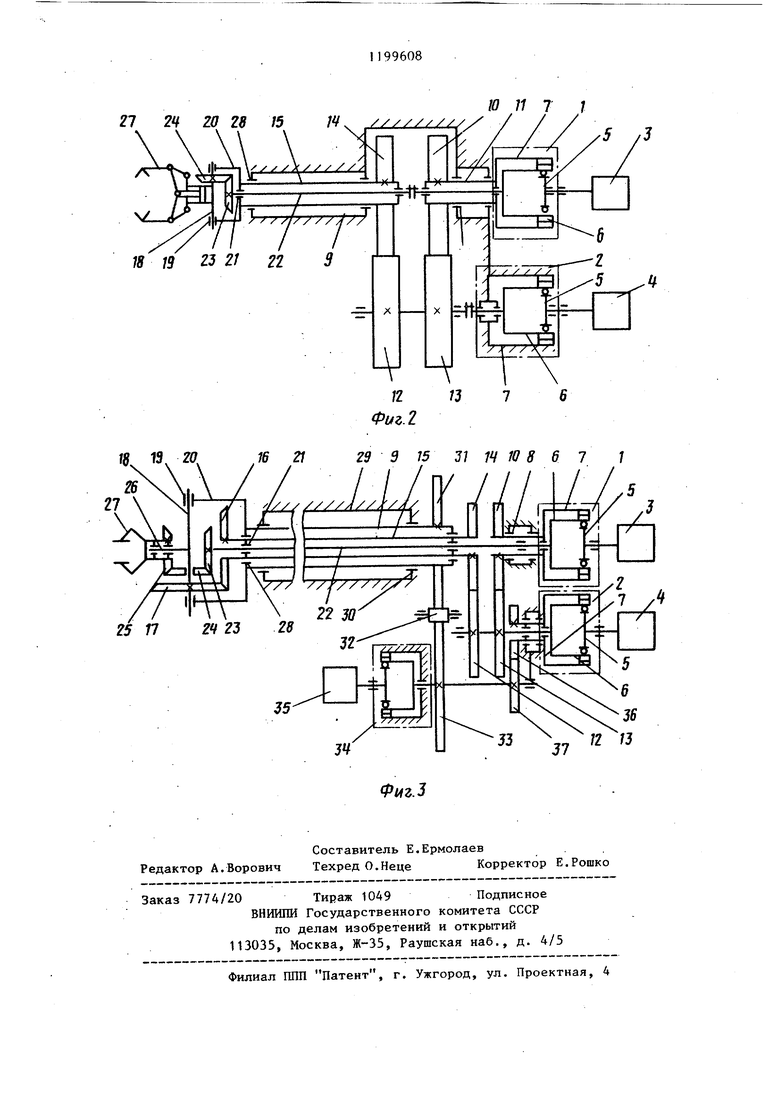
На фиг. 1 и 2 представлены кинематические схемы руки манипулятора с двумя степенями подвижности (первый вариант); на фиг. 3 - кинематическая схема руки манипулятора с тремя степенями подвижности (второй вариант).
По первому варианту рука манипулятора (4мг. 1) содержит волновые редукторы 1 и 2 с двигателями 3 и 4. Волновые редукторы включают в себя генераторы 5 волн, гибкие колеса 6 и жесткие колеса 7, причем генераторы 5 волн связаны с валами двигателей 3 и 4, а жесткое колесо редуктора 1 установлено в . подшипниках 8 основания 9, при этом жесткое колесо редуктора 2 закреплено на основании г
На жестком колесе волнового редуктора 1 закреплено зубчатое колесо 10, связанное с жестким колесом посредством полого вала 11, а с гибким
колесом волнового редуктора 2 жестко .связаны зубчатые ко:уеса 12 и 13. Шестерня 13 находится в зацеплении с зубчатым колесом 10, а шестерня 12
5 находится в зацеплении с зубчатым колесом 14, жестко закрепленным на полом валу 15, на другом конце которого жестко закреплено коническое колесо 16, находящееся в зацеплении
10 |С коническим колесом 17, жестко закЬепленным на оси 18 качания, которая установлена в подшипниках 19 в вилке 20 кисти. Внутри полого вала ,15 в подшипниках 21 установлен вал 22,
15 один конец которого связан с гибким колесом 6 волнового редуктора 1, на другом конце которого жестко закреплена коническая шестерня 23, находящаяся в зацеплении с коническим
20 колесом 24, установленным на оси 18 качания. С другой стороны коническое колесо 24 входит в зацепление с коническим колесом 25. фоническое колесо 25 подвижно установлено на
25 оси 26, жестко связанной с осью 18 качания. С коническим колесом 25 жестко связан схват 27, полый вал 15 установлен в подшипниках 28 корпуса 9 руки.
30 При другом сочетании степеней подвижности кисти (фиг. 2).вилка 20 кисти устанавливается в корпусе руки с возможностью поворота, а
3
схват 27 - с возможностью качания относительно оси 18.
По второму варианту корпус 9 руки устанавливается на основании 29 с возможностью поворота вокруг продольной оси на подшипниках 30. На одном конце корпуса 9 имеется вилка 20 кисти, а на другом конце закреплено зубчатое колесо 31, находящееся в зацеплении с промежуточным колесом 32, которое, в свою очередь, зацепляется с цилиндрическим колесом 33, жестко связанным с гибким колесом дополнительного волнового редуктора 34 с двигателем
36,находящимся в зацеплении с колесом 37, жестко связанным с зубчатым колесом 33 и гибким колесом волнового редуктора 34.
Работа руки манипулятора по первому варианту осуществляется следую1ЦИМ образом.
При вращении схвата двигатель 3 вращает генератор 5 волн волнового редуктора 1, жесткое колесо 7 этого редуктора стоит на месте, так как оно посредством зубчатых колес 10 и 13, волнового редуктора 2 связно с корпусом 9 руки, гибкое колесо 6 волнового редуктора 1 вращается и вращает вал 22 с сидящим на . нем колесом 23, которое через колесо 24 передает движение колесу 25, которое вместе со схватом 27 врщаются вокруг оси 26, реализуется степень подвижности - вращение схвата.
При качании схвата электродвигатель 4 вращает генератор 5 волн волнового редуктора 2, вращается гибкое колесо 6 с жестко связанными с ним зубчатыми колесами 12 и 13, которые через колеса 10 и 14 и волновой редуктор 1 сообщают валам 15
99608 4 .
и 22 вращение в одну сторону, причем вращение это происходит с одной угловой скоростью. Вместе с валом 15 вращается зубчатое колесо 16, кото- ,
5 рое вращает коническое зубчатое -колесо 17 и ось 18 в подшипниках 19 . вилки 20, происходит качание схвата 27, так как колесо 23 и вал 22 вращаются в ту же сторону, что и вал
10 15, схват 27 не вращается относительно оси 26.
При другом сочетании степеней подвижности (фиг. 2) волновой редуктор 1 с двигателем 3 осуществляют
t5 качание схвата, а волновой редуктор 2 с двигателем 4 осуществляют вращение кисти.
Работа руки манипулятора по второму варианту при вращении схвата
20 и его качании аналогична работе руки манипулятора по первому варианту (фиг. 1) за исключением реализации третьей степени подвижности -. вращение корпуса руки.
25 При вращении корпуса 9 руки манипулятора электродвигатель 35 приводит во вращение генератор волн волнового-редуктора 34, который, в свою очередь, приводит во вращение
30 волновое колесо редуктора 34 и вместе с ним - зубчатые колеса 33 и 37. Генераторы 5 волн волновых редукто.ров 1 и 2 стоят на месте. От зубчатого колеса 37 через зубчатое колесо 36, волновой редуктор 2, зубча35тые колеса 12, 13, 10 и 14, волновой редуктор 1 движение передается валам 15 и 22, а от зубчатого колеса 33 корпусу 9.
Передаточные отношения у зубчатых
40 колес подобраны так, что валы 15, 22 и корпус 9 вращаются с одинаковой угловой скоростью в одну сторону. Таким образом, осуществляется кинематическая развязка степени подвижнос45ти вращения корпуса руки относительно степеней подвижности вращения и качания схвата.
27 24 20 28 75 /
Ю 11 7 I
-5 /J
б -2
| Манипулятор | 1973 |
|
SU488388A3 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
