Изобретение относится к устройствам для определения и оценки угловых пространственных параметров поля геометрической видимости с рабочего места водителя транспортного средства с учетом его антропометрических данных и бинокулярности зрения.
Известно устройство для измерения параметров обзорности кабины транспортного средства содержащее трассирующий элемент, воспроизводящий линию взгляда оператора, смонтированный на установленном внутри кабины приспособлении, которое обеспечивает перемещение его в исходные точки зрения.
Недостаток известного устройства, предназначенного для определения нормативных зон обзорности на световом проеме
ветрового стекла, заключается в сложности получения характеристики обзорности, определяемой объективными параметрами видимого пространства в поле зрения водителя через указанный проем.
Для определения линий взляда, воспроизводимых трассирующим элементом и проходящих через точки контура светового проема касательно к глазным эллипсам, требуется многократная переналадка уст- ройства, что существенно увеличивает трудоемкость процесса. При этом затруднено обеспечение необходимой точности и возможно получение дискретных значений параметров характеристики обзорности.
Целью изобретения является получение более полной характеристики обзорности через световой проем ветрового стекла для облегчения оценки последней при одновременном упрощении процедуры измерения и оценки.
Указанная цель достигается тем, что устройство для определения и оценки обзорности через световой проем ветрового стекла снабжено параллелограммным меха- низмом, состоящим из двух пар равновеликих рычагов, соединяющих поворотный кронштейн и трассирующий элемент с возможностью перемещения последнего, и фиксатором положений трассирующего элемента, содержащим кольцевой сектор, закрепленный на оси качания трассирующего элемента с возможностью взаимодействия своими концами с выступом на кулисе, выполненной с продольными паза- ми, охватывающими подвижные оси качания рычагов параллелограммного механизма, и поперечным пазом, в котором расположен палец, закрепленный в одном из указанных рычагов.
Параллелограммный механизм может быть снабжен компенсатором, выполненным в виде спиральной пружины, связывающей один из рычагов этого механизма с кронштейном.
Для автоматической записи характеристики обзорности на двухкоординатный регистратор устройство может быть снабжено датчиком перемещений трассирующего элемента, датчиком наклона трассирующе- го элемента и датчиком поворота кронштейна относительно консоли, при этом корпус последнего датчика связан со стойкой посредством тяги, образующей с поворотной консолью параллелограммный механизм, причем корпус первого упомянутого датчика соединен со звеном параллелограммного механизма, охватывающим подвижные оси качания рычагов, а подвижный элемент этого датчика связан с кулисой.
Устройство может быть снабжено пружиной и упором для фиксации консоли в начальном крайнем положении и упором, ограничивающим угол поворота кронштейна относительно консоли.
На фиг. 1 изображена установка устройства на трехмерном посадочном манекене; на фиг. 2 - схема перемещения трассирующего элемента в вертикальной плоскости; на фиг. 3 - то же в горизонтальной плоскости; на фиг. 4 - устройство, вид с левой стороны; на фиг. 5 - сечение А-А на фиг. 4; на фиг. 6 - сечение Б-Б на фиг. 5; на фиг. 7 - сечение В-В на фиг. 4; на фиг. 8 - устройство, вид с правой стороны; на фиг. 9 - сечение Г-Г на фиг. 8; на фиг. 10-сечение Д-Д на фиг. 8; на фиг. 11 - вид Е на фиг. 10; на фиг. 12 -устройство, вид сверху; на фиг. 13 - характеристика обзорности транспортного средства через световой проем ветрового стекла; на фиг. 14 - принципиальная электрическая схема устройства.
Устройство для определения и оценки обзорности.предназначено для получения объективной унифицированной характеристики обзорности через световой проем ветрового стекла. Это устройство располагают на рабочем месте водителя транспортного средства на трехмерном посадочном манекене 1 с помощью кронштейна 2, устанавливаемого на поворотном штоке 3 манекена.
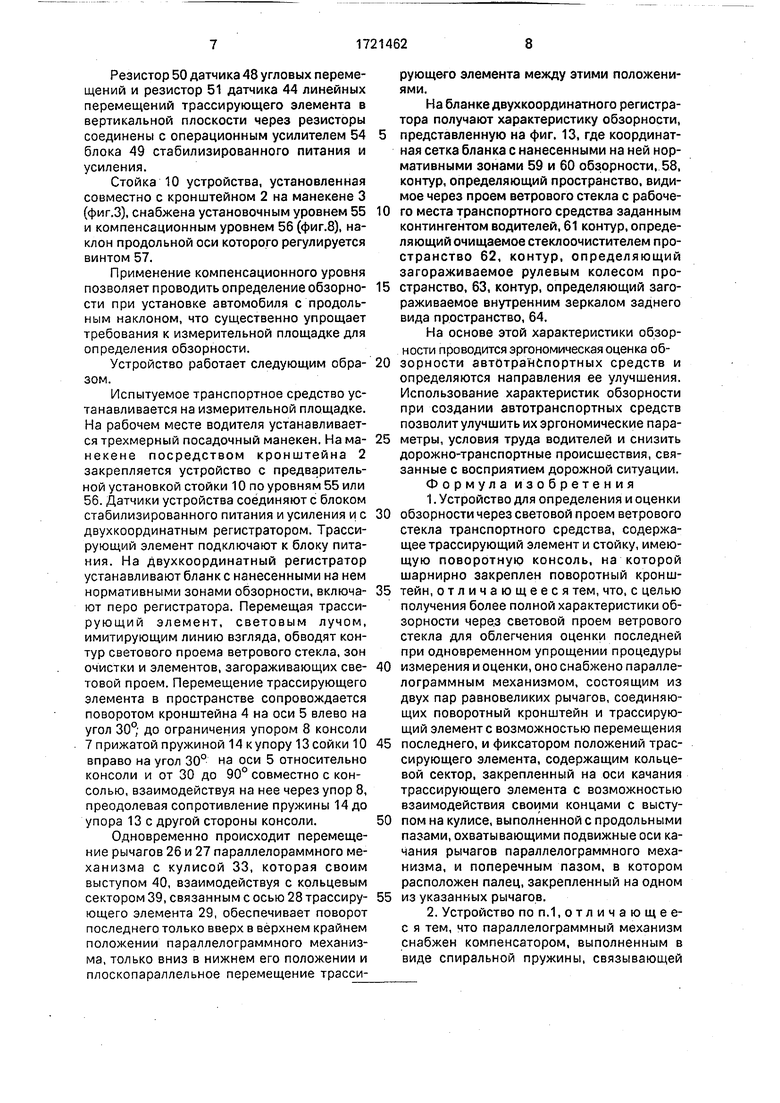
Устройство содержит кронштейн 4 (фиг.4), установленный на оси 5 (фиг.5), закрепленной в подшипниках б поворотной консоли 7. Поворот оси 5 относительно консоли 7 ограничен упором 8, взаимодействующим с сектором 9, закрепленным на оси 5. Другим концом консоль 7 связана со стойкой 10 посредством оси 11, установленной в подшипниках 12. Постоянное прижатие консоли 7 к левому упору 13 осуществляется пружиной 14.
На оси 5 кронштейна 4 установлен лимб 15 и ползунок 16 датчика 17 угловых перемещений в горизонтальной плоскости. Корпус датчика 17 (фиг. 5,6,9), имеющий указатель 18 визуального измерения угла поворота, связан посредством оси 19, рычага 20 и оси 21 со стойкой 10. Рычаг 20 и консоль 7 образуют параллелограммный механизм. Корпус датчика 17, установленный на оси 5 шарнирно благодаря подшипнику 22, жестко связан с обмоткой 23 сопротивления, по которой перемещается ползун. 16.
На кронштейне 4 посредством осей 24 и 25 закреплены рычаги 26 и 27 параллелограммного направляющего механизма, обеспечивающего перемещение оси 28 поворота
трассирующего элемента 29 параллельно
горизонтальной плоскости.
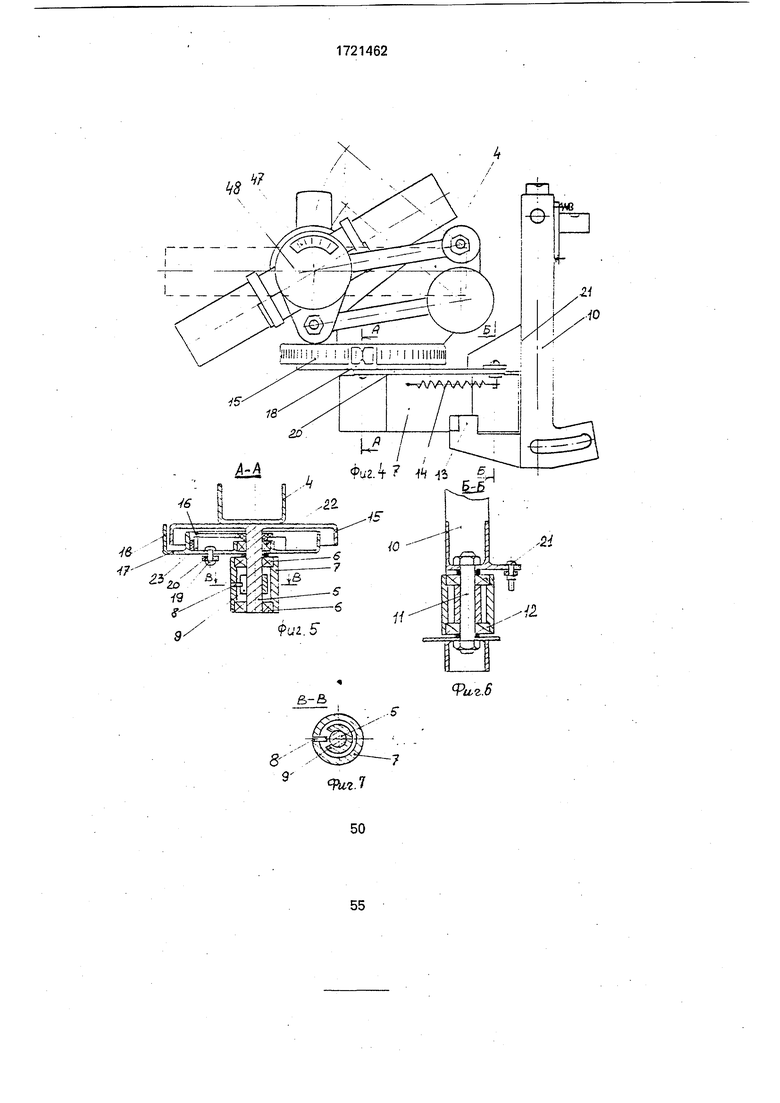
Для легкости вертикального перемещения трассирующего элемента 29 посредством компенсации его веса на оси 25 (фиг.9) установлен компенсатор в виде спиральной пружины 30, связанной с осью 25 и корпусом 31 компенсатора, жестко соединенным с одним из рычагов параллелограммного механизма. Необходимое для компенсации веса трассирующего элемента и других подвижных деталей усилие пружин 30 обеспечивается закруткой оси 25 с последующим удержанием ее от поворота планкой 32, имеющей с одного конца жесткое соединение с осью 25 и закрепленной другим концом на оси 24. В качестве отправных моментов для кинематики перемещения трассирующего элемента 29, имитирующего линию взгляда водителя, используются глазные эллипсы по стандарту ИСО 4513. Исходные точки Л и V2 (фиг.2) на вертикальной проекции эллипса выбраны с таким учетом, что обеспечивают для многообразия транспортных средств получение линий взгляда от точек светового проема ветрового стекла касательных к эллипсам с минимально возможной погрешностью.
Положение трассирующего элемента в верхней точке Vi служит для определения углов ai линий взгляда вверх. Перемещение трассирующего элемента из верхней точки Vi в нижнюю V2 определяется линейным перемещения Д . При нижнем положении трассирующего элемента в точке V2 определяются углы ai линий взгляда вниз.
Исходная точка V на горизонтальной проекции (фиг.З) выбрана из учета обеспечения линии взгляда, касательной эллипсам в пределах поворота глаз ±30° и с дальнейшим поворотом вправо свыше этих углов относительно точки Р, определяющей центр поворота головы. Положение трассирующего элемента в точке V служит для определения углов вправо/ 1 и влево /За на 30°. Для углов /З-j вправо свыше 30° служит точка V1, являющаяся производной от V, путем поворота последней относительно точки Р.
Поворот только вверх трассирующего элемента 29 в верхнем положении (точка Vi) плоскопараллельное перемещение вниз (в точку V2) и поворот там только вниз обеспечивается фиксатором, имеющим подвижную кулису 33, перемещающуюся вдоль осей 28 и 34.
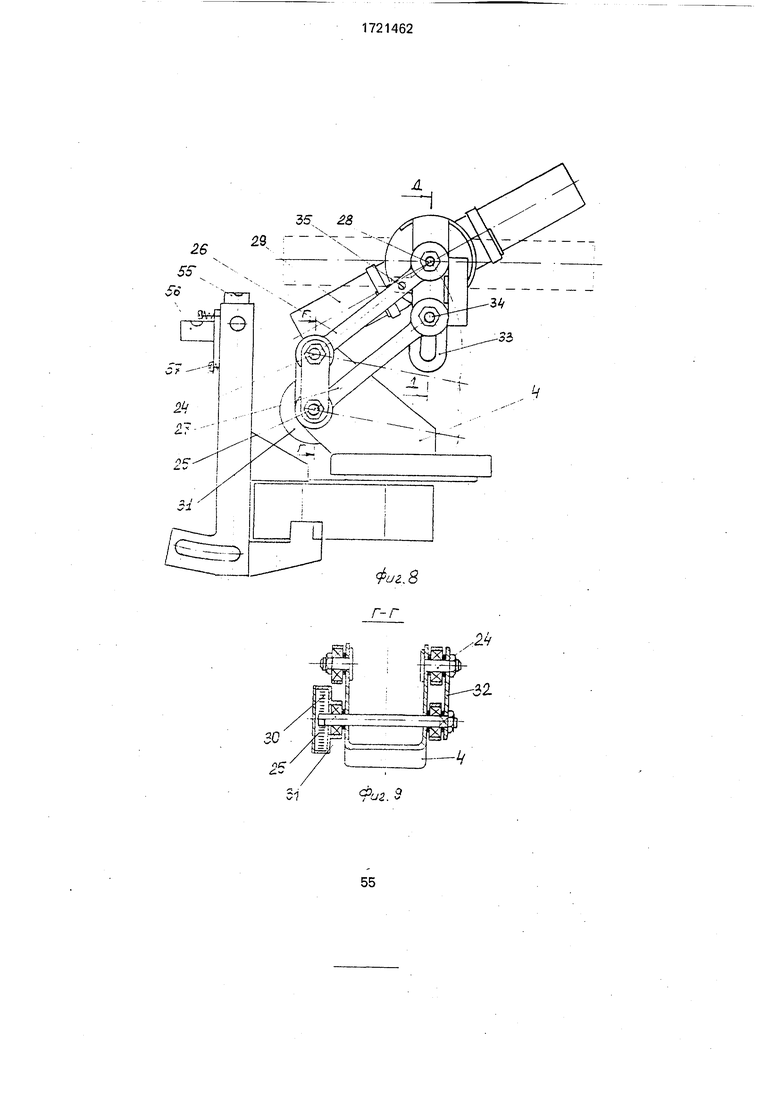
Перемещение кулисы 33 относительно осей 28 и 34 обеспечивается укрепленным на рычаге 26 пальцем 35, взаимодействующим с поперечным пазом 36 кулисы, и происходит при перемещении трассирующего элемента в вертикальной плоскости из одного крайнего положения в другое. Строго параллельное перемещение кулисы обеспечивается за счет продольных пазов 37. Поворотная ось 28, на которой в ложе 38 установлен трассирующий элемент, имеет со стороны кулисы кольцевой сектор 39, взаимодействующий своими концами с выступом 40 кулисы 33. Выступ 40 кулисы при перемещении трассирующего элемента из верхнего положения в нижнее блокирует поворот сектора 39 и обеспечивает плоскопараллельное перемещение трассирующего
элемента.
В верхнем положении трассирующего элемента (фиг.11) выступ 40 находится ниже верхней кромки сектора 39, что обеспечивает возможность поворота оси 28 с трассирующим элементом вверх. При нижнем положении трассирующего элемента выступ 40 находится выше нижней кромки сек- тора 39, тем самым обеспечивая возможность поворота оси 28 и трассирующего элемента вниз.
Подвижные звенья 41 и 42 параллелограммного механизма неподвижно соединены с осью 34, а на оси 28 они установлены на подшипниках 43, На звене 41 закреплен
датчик 44 вертикальных линейных перемещений трассирующего элемента. Поводок 45 ползуна датчика 44, содержащего переменный резистор, соединен с выступом 46 кулисы 33, перемещающейся пропорционально вертикальному перемещению трассирующего элемента.
С другой стороны ось 28 связана с лимбом 47 (фиг.4) и с ползуном датчика 48 угловых перемещений трассирующего элемента
в вертикальной плоскости. Корпус датчика 48, установленный концентрично оси 28, закреплен на звене 42. Между собой датчики 44 и 48 соединены электрически таким образом, что сигнал, поступающий на одну из
координат регистратора, пропорционален в угловом масштабе повороту трассирующего элемента в крайних точках и пропорционален в линейном масштабе перемещению между ними.
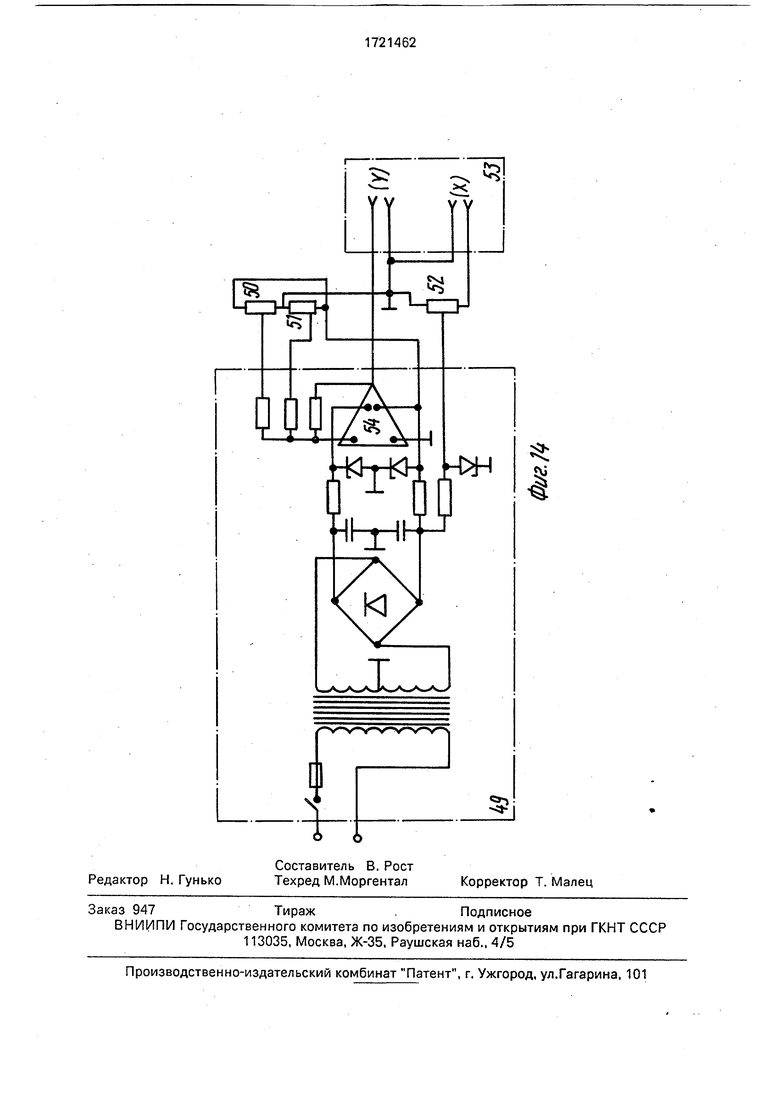
Принципиальная электрическая схема устройства представлена на фиг. 14. Она состоит из блока 49 стабилизированного питания и усиления,резисторов 50 и 51,потен- циометрических датчиков 48 и 44 углового и
линейного перемещений трассирующего элемента в вертикальной плоскости, резистора 52, датчика 17 углового перемещения кронштейна 4 в горизонтальной плоскости к двухкоординатного резистора 53.
Резистор 50 датчика 48 угловых перемещений и резистор 51 датчика 44 линейных перемещений трассирующего элемента в вертикальной плоскости через резисторы соединены с операционным усилителем 54 блока 49 стабилизированного питания и усиления.
Стойка 10 устройства, установленная совместно с кронштейном 2 на манекене 3 (фиг.З), снабжена установочным уровнем 55 и компенсационным уровнем 56 (фиг.8), наклон продольной оси которого регулируется винтом 57.
Применение компенсационного уровня позволяет проводить определение обзорности при установке автомобиля с продольным наклоном, что существенно упрощает требования к измерительной площадке для определения обзорности.
Устройство работает следующим образом.
Испытуемое транспортное средство устанавливается на измерительной площадке. На рабочем месте водителя устанавливается трехмерный посадочный манекен. На ма- некене посредством кронштейна 2 закрепляется устройство с предварительной установкой стойки 10 по уровням 55 или 56. Датчики устройства соединяют с блоком стабилизированного питания и усиления и с двухкоординатным регистратором. Трассирующий элемент подключают к блоку питания. На двухкоординатный регистратор устанавливают бланк с нанесенными на нем нормативными зонами обзорности, включают перо регистратора. Перемещая трассирующий элемент, световым лучом, имитирующим линию взгляда, обводят контур светового проема ветрового стекла, зон очистки и элементов, загораживающих световой проем. Перемещение трассирующего элемента в пространстве сопровождается поворотом кронштейна 4 на оси 5 влево на угол 30° до ограничения упором 8 консоли 7 прижатой пружиной 14 купору 13 сойки 10 вправо на угол 30° на оси 5 относительно консоли и от 30 до 90° совместно с консолью, взаимодействуя на нее через упор 8, преодолевая сопротивление пружины 14 до упора 13 с другой стороны консоли.
Одновременно происходит перемещение рычагов 26 и 27 параллелораммного ме- ханизма с кулисой 33, которая своим выступом 40, взаимодействуя с кольцевым сектором 39, связанным с осью 28 трассирующего элемента 29, обеспечивает поворот последнего только вверх в верхнем крайнем положении параллелограммного механизма, только вниз в нижнем его положении и плоскопараллельное перемещение трассирующего элемента между этими положениями.
На бланке двухкоординатного регистратора получают характеристику обзорности,
представленную на фиг. 13, где координатная сетка бланка с нанесенными на ней нормативными зонами 59 и 60 обзорности, 58, контур, определяющий пространство, видимое через проем ветрового стекла с рабочего места транспортного средства заданным контингентом водителей, 61 контур, определяющий очищаемое стеклоочистителем про- странство 62, контур, определяющий загораживаемое рулевым колесом пространство, 63, контур, определяющий загораживаемое внутренним зеркалом заднего вида пространство, 64,
На основе этой характеристики обзорности про водится эргономическая оценка обзорности автотранспортных средств и определяются направления ее улучшения. Использование характеристик обзорности при создании автотранспортных средств позволит улучшить их эргономические параметры, условия труда водителей и снизить дорожно-транспортные происшествия, связанные с восприятием дорожной ситуации. Формула изобретения
1.Устройство для определения и оценки обзорности через световой проем ветрового
стекла транспортного средства, содержащее трассирующий элемент и стойку, имеющую поворотную консоль, на которой шарнирно закреплен поворотный кронштеин, отличающееся тем, что, с целью получения более полной характеристики обзорности через световой проем ветрового стекла для облегчения оценки последней при одновременном упрощении процедуры
измерения и оценки, оно снабжено паралле- лограммным механизмом, состоящим из двух пар равновеликих рычагов, соединяющих поворотный кронштейн и трассирующий элементе возможностью перемещения
последнего, и фиксатором положений трассирующего элемента, содержащим кольцевой сектор, закрепленный на оси качания трассирующего элемента с возможностью взаимодействия своими концами с выступом на кулисе, выполненной с продольными пазами, охватывающими подвижные оси качания рычагов параллелограммного механизма, и поперечным пазом, в котором расположен палец, закрепленный на одном
из указанных рычагов.
2.Устройство по п.1, о т л и ч а ю щ е е- с я тем, что параллелограммный механизм снабжен компенсатором, выполненным в виде спиральной пружины, связывающей
один из рычагов этого механизма с кронштейном.
3. Устройство по пп. 1 и 2, о т л и ч а ю- щ е е с я тем, что, с целью обеспечения возможности автоматической записи характеристики обзорности на двухкоординат- ный регистратор, оно снабжено датчиком перемещений трассирующего элемента, датчиком наклона трассирующего элемента и датчиком поворота кронштейна относительно консоли, при этом корпус последнего датчика связан со стойкой посредством тяги, образующей с поворотной консолью
параллелограммный механизм, причем корпус первого упомянутого датчика соединен со звеном параллелограммного механизма, охватывающим подвижные оси качания ры- чагов, а подвижный элемент этого датчика связан с кулисой.
4. Устройство по пп. 1-3, отличающееся тем, что оно снабжено пружиной и упором для фиксации консоли в начальном крайнем положении и упором, ограничивающим угол поворота кронштейна относительно консоли.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оценки обзорности автотранспортных средств | 1990 |
|
SU1721463A1 |
| Способ оценки обзорности транспортного средства | 1988 |
|
SU1615598A1 |
| Трехмерный посадочный манекен для транспортного средства | 1981 |
|
SU962783A1 |
| Устройство для измерения параметров обзорности кабины | 1972 |
|
SU469907A1 |
| Устройство для измерения параметров обзорности кабины транспортного средства | 1974 |
|
SU491069A1 |
| Устройство для определения параметров обзорности кабины транспортного средства | 1980 |
|
SU926556A1 |
| Устройство для измерения параметров обзорности рабочего места оператора транспортного средства или стационарной установки | 1982 |
|
SU1124192A1 |
| ДВУХКОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2478515C2 |
| ВНУТРЕННЕЕ ЗЕРКАЛО ЗАДНЕГО ВИДА ДЛЯ АВТОМОБИЛЯ | 1994 |
|
RU2087346C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ ИНФОРМАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2531790C1 |



Изобретение относится к устройствам для определения и оценки угловых пространственных параметров поля геометрической видимости с рабочего места водителя с учетом его антропометрических данных и бинокулярности зрения. Целью изобретения является получение более полной характеристики обзорности через световой проем ветрового стекла для облегчения оценки последней при одновременном упрощении процедуры измерения и оценки. Устройство для определения и оценки обзорности предназначено для получения объективной унифицированной характеристики обзорности через световой проем ветрового стекла. Это устройство располагают на рабочем месте водителя транспортного средства на трехмерном посадочном манекене 1 с помощью кронштейна 2, устанавливаемого на поворотном штоке 3 манекена. Устройство для определения и оценки обзорности содержит трассирующий элемент, который соединен с поворотным кронштейном при помощи па- раллелограммного механизма, обеспечивающего перемещение оси поворота трассирующего элемента параллельно горизонтальной плоскости из нижнего положения в верхнее и наоборот. Поворот трассирующего элемента в верхнем положении только вверх, плоскопараллельное перемещение вниз и поворот в нижнем положении только вниз обеспечиваются фиксатором, содержащим кольцевой сектор, закрепленный на оси качения трассирующего элемента и имеющий возможность взаимодействия своими концами с выступом на кулисе, перемещающейся вдоль осей. 3 з.п.ф-лы, 14 ил. сл VI ю Ј о го
Фиг.1
9 ™db
S
Sfc
r
Д
Sa
«r
дач
g
h| J f- i
/ / П
9-1
;;
57,
-; . ; CjЛ
гг
т
5/v-i
c
91
SfZWIZLl
h-л.
toШ
rt
/7
,ss
JMI
Э
0
J
Iff
®
ss
9
гэнш
#ff
9Ј
гэнга
J/
и к /®
О Ю° . 20° +30° 40° 500 60°
-30° -20° -10° О
L4-J Фи&п
Hl-X-lh
5; 4
| Устройство для измерения параметров обзорности кабины | 1972 |
|
SU469907A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
