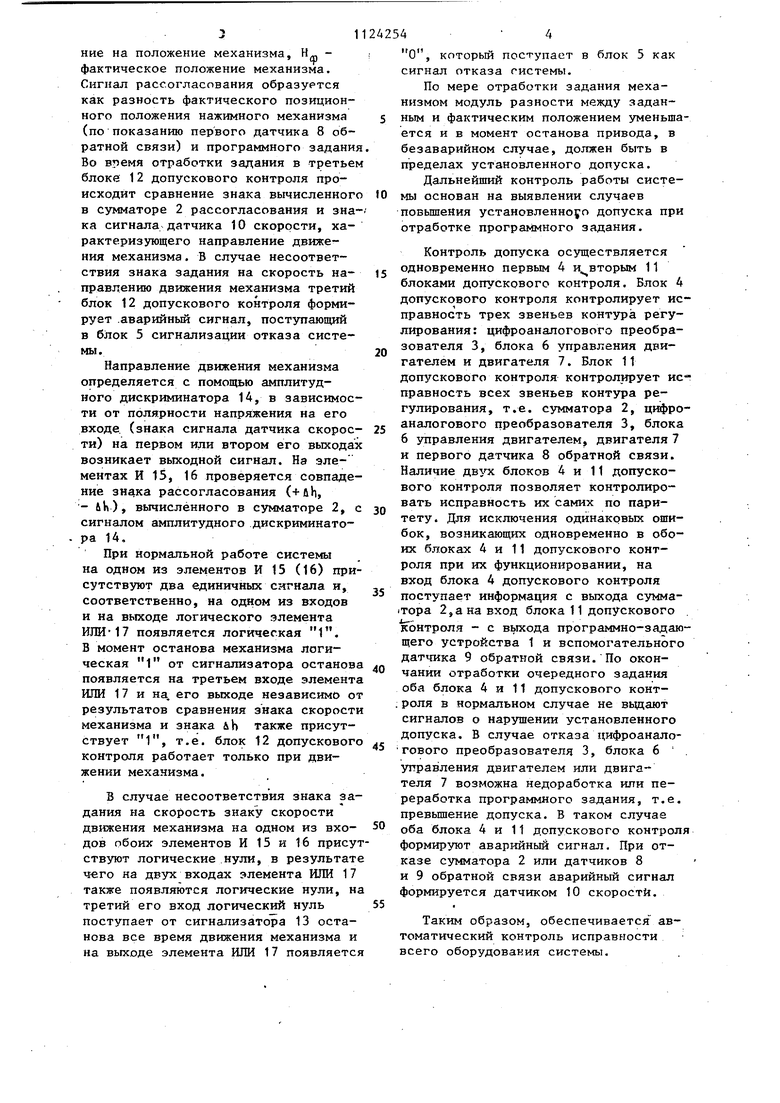
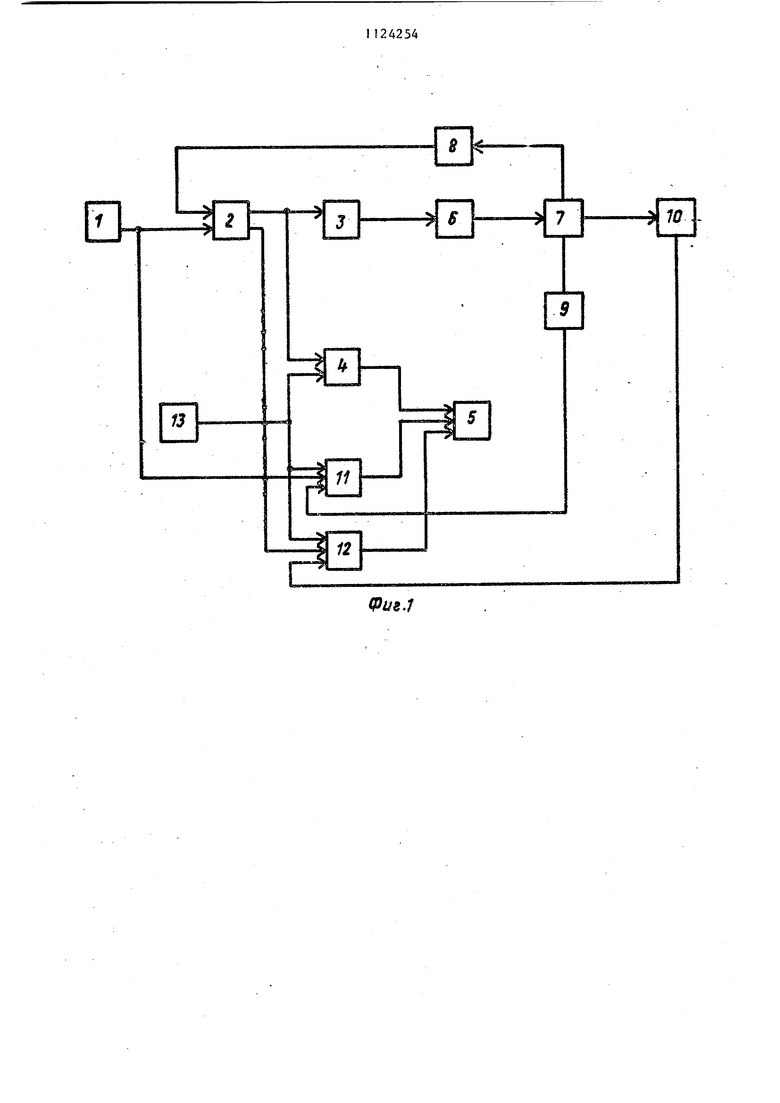
Изобретение относится к системам автоматизированного управления и можрт быть использовано для позиционного управления нажимными механизмами прокатных станов. По основному авт.св. 557353 известна цифровая система позиционного регулирования, содержащая программно-задающее устройство, выход которого подключен к первому входу сумматора, выход которого соединен с входом цифроаналогового преобразователя и первым входом первого блока допускового контроля, выход которого подключен к первому входу блока сигнализации отказа системы, второй вход - к вьпсоду сигнализатор останова привода, выход цифроаналог вого преобразователя через блок упр ления соединен с двигателем, выходн вал которого соединен с первым и вт рым датчиками обратной связи, выход первого датчика обратной связи подключен к второму входу сумматора, а выход второго датчика обратной связи подключен к третьему вход второго блока допускового контроля, первый вход которого подключен к выходу сигнализатора останова приво да, второй вход - к выходу программ но-задающего устройства, а выход по ключен к второму входу блока сигнал зации отказа системы ij . Недостатком известной системь является то, что она не обеспечивае безаварийную работу нажимного механизма при несоответствии направлени движения механизма знаку задания на скорость двигателя. Это несоответствие может быть вызвано неисправностью одного из усилителей блока управления двигателем, при которой выходной сигнал усилителя не меняет знак при изменении полярности входного сигнала. I. , В результате при задании на пере мещение механизма вверх (Но , где Н - задание на положение механизма; Н - фактическое положение механизма) происходит перемещение механизма вниз с максимальной скоростью, что может привести к аварий ной ситуации посадка вала на вал, либо при задании на перемещение механизма вниз (Н Н) механизм перемещается вверх в крайнее положе ние , что тоже может привести к поломке механического оборудования. Цель изобретения - повьппение надежности системы. Поставленная цель, достигается тем, что в дифровзто систему позиционного регулирования введены датчик скорости движения механизма и третий блок допускового контроля, состоящий из амплитудного дискриминатора, первого и второго злементов И, и элемента .ИЛИ, выход датчика скорости соединен с входом амплитудного дискриминатора, первый выход которого соединен с первым входом первого.элемента И, второй выход - с первым входом второго элемента И, вторые входы первого и второго элементов И подключены к второму выходу сумматора, выходы первого и второго элементов И соединены соответственно с первым и вторым входами элемента ИЛИ, третий вход которого подключен к выходу сигнализатора останова привода, выход элемента .ИЛИ соединен.с третьим входом блока сигнализации отказа системы. На фиг, 1 изображена функциональная схема системы; на фиг. 2 - функциональная схема третьего блока допускового контроля. Цифровая система позиционного регулирования (фиг.1) содержит программно-задающее устройство 1, сумматор 2, цифроаналоговый преобразова тель 3, первый блок 4 допускового контроля, блок 5 сигнализации отказа системы, блок 6 управления, двигатель 7, первый датчик 8 и второй датчик 9 обратной связи, датчик 10 скорости, второй блок 11 допускового контроля,.третий блок 12 допускового контроля и сигнализатор 13 останова привода. Третий блок 12 допускового контроля (фиг .2) содержит амплитудный дискриминатор 14, первый 15 и второй 16 элементы И, элемент ИЛИ 17. Система работает следующим образом. При вьщаче программно-задающим устройством 1 задания на отработку нажимным механизмом очередного перемещения сумматор 2 формирует и выдает в цифровой форме многоразрядный сигнал рассогласования на вход цифроаналогового преобразователя 3 для управления двигателем 7 и дискретный сигнал знака вычисленного рассогласования (+Ah) при Н, либп (-uh) при Hj Н,р, где Н - зада311
ние на положение механизма, Нд, фактическое положение механизма. Сигнал рассогласования образуется как разность фактического позиционного положения нажимного механизма (по показанию первого датчика 8 обратной связи) и программного задания Во время отработки задания в третьем блоке 12 допускового контроля происходит сравнение знака вычисленного в сумматоре 2 рассогласования и знака сигнала датчика 10 скорости, характеризующего направление движения механизма. В случае несоответствия знака задания на скорость направлению движения механизма третий блок 12 допускового контроля формирует .аварийный сигнал, поступающий в блок 5 сигнализации отказа системы.
Направление движения механизма определяется с помощью амплитудного дискриминатора 14, в зависимости от полярности напряжения на его входе, (знака сигнала датчика скорости) на первом иди втором его выхода х возникает выходной сигнал. На элементах И 15, 16 проверяется совпадение знака рассогласования (+йЬ, - &Ь), вычисленного в сумматоре 2, с сигналом амплитудного .дискриминатора 14.
При нормальной работе системы на одном из элементов И 15 (16) присутствуют два единичных сигнала и, соответственно, на одном из входов и на выходе логического элемента ИЛИ17 появляется логическая 1. В момент останова механизма логическая 1 от сигнализатора останова появляется на третьем входе элемента ИЛИ 17 и на. его выходе независимо от результатов сравнения знака скорости механизма и знака &h также присутствует 1, т.е. блок 12 допускового контроля работает только при движении механизма.
В случае несоответствия знака задания на скорость знаку скорости движения механизма на одном из входов обоих элементов И 15 и 16 присутствуют логические нули, в результате ч«го на двух входах элемента ИЛИ 17 также появляются логические нули, на третий его вход логический нуль поступает от сигнализатора 13 останова все время движения механизма и на выходе элемента ИЛИ 17 появляется
4254 4
О, который поступает в блок 5 как сигнал отказа системы.
По мере отработки задания механизмом модуль разности между задан5 ным и фактическим положением уменьшается и в момент останова привода, в безаварийном случае, должен быть в пределах установленного допуска.
Дальнейший контроль работы систе10 мы основан на выявлении случаев
повышения установленно о допуска при отработке программного задания.
Контроль допуска осуществляется
J, одновременно первым 4 и вторым 11 блоками допускового контроля. Блок 4 допускового контроля контролирует исправность трех звеньев контура регулирования: цифроаналогового преобра-- зователя 3, блока 6 управления двигателем и двигателя 7. Блок 11 допускового контроля контролирует исправность всех звеньев контура регулирования, т.е. сумматора 2, аналогового преобразователя 3, блока 6 управления двигателем, двигателя 7 и первого датчика 8 обратной связи. Наличие двух блоков 4 и 11 допускового контроля позволяет контролировать исправность их самих по паритету. Для исключения одинаковых ошибок, возникающих одновременно в обоих блоках 4 и 11 допускового контроля при их функционировании, на вход блока 4 допускового контроля
5 поступает информация с выхода суммаiTopa 2,а на вход блока 11 допускового к онтроля - с вьпсода программно-задающего устройства 1 и вспомогательного датчика 9 обратной связи.По окон0 чании отработки очередного задания оба блока 4 и 11 допускового конт:роля в нормальном случае не вьщают сигналов о нарушении установленного допуска. В случае отказа цифроанало 5 гового преобразователя 3, блока 6 . управления двигателем или двига- теля 7 возможна недоработка или переработка программного задания, т.е. превьш1ение допуска. В таком случае
оба блока 4 и 11 допускового контроля формируют аварийный сигнал. При отказе сумматора 2 или датчиков 8 и 9 обратной связи аварийный сигнал формируется датчиком 10 скорости.
Таким образом, обеспечивается автоматический контроль исправности всего оборудования системы. 5.11 Контроль допуска первым блоком 4 допускового контроля осуществляется по команде одного из двух стробсигналов. Первый стробсигнал формируется внутри блока 4 в момент возникновения нулевого значения сигнала . рассогласования. По этому сигналу включается непрерывный контроль допуска одновременно в блоках 4 и 11 допускового контроля до вьщачи очередного программного задания. Второй стробсигнал формируется сигнализатором 13 останова двигателя в момент остановки двигателя 7 и вьщается в блок 4 допускового контроля, где он запоминается и выполняет функции, аналогичные первому стробсигналу. Необходимость получени такого сигнала заключается в том,, что при недоработке программного задания системой первый стробсигнал сформироваться не может,5так как.сиг нал рассогласования к моменту остано ки двигатели не принимал нулевого значения. Таким , в первом блоке 4 допускового Контроля в момент возникновения нулевого значения сигнала рассогласования или останова приводя контролируется величина допуска ив случае превьшения установленного допуска ВБщается сигнал в бл 5 сигнализации отказа системы. Контроль допуска вторьм блоком 11 допускового контроля осуществляется по команде одного из стробсигналов, аналогичных стробсигналам, ис пользуемым в работе блока 4 допускового контроля. Работа блока допускового контроля заключается в следующем. В момент вы дачи очередного программного задания на перестановку нажимных механиз jiOB в блоке 11 допускового контроля формируется и запоминается в цифровой форме величина необходимого перемещения механизмов на очередную позицию. Исходной информацией для формирования указанной величины перемещения являются считанные из программы обжатий два задания: ранее отработанное и вновь вьщанное. Модуль разности этих двух заданий запоминается . При отработке последнего задания на позиционирование осуществляется Подсчет фактической величины перемещения механизмов по выходному унитарному коду второго датчика 9 обратной связи и по возникновению одного из двзпс стррбсигналов вьтолня.ется сравнение запомненной ожидаемой величины перемещения и .фактической (подсчитанной) величины перемещения. Соотношение этих величин должно быть в пределах установленного допуск а. При нарушении установленного допуска формируется аварийный сигнал, который, вьщается в блок 5 сигнализации отказа системы. В блоке 11 допускового контроля первьй стробсигнал возникает в момент равенства фактической (подсчитанной) величины перемещения ожидаемой величине перемещения. С момента возникновения данного стробсигнала осуществляется непрерывный кднтроль допуска одновременно блоками 11 и 4 допускового контроля. Изобретение повышает надежность и безаварийность цифровой системы позиционного регулирования нажимным механизмом прокатного стана за счет устранения возможности аварийной ситуации типа посадка вала на вал или поломки, связанной с перемещением механизма в крайнее положение.
12
«м
J
:ai &

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система позиционного регулирования | 1976 |
|
SU557353A1 |
| ВСГ-СОЮЗНАЯр'^-"Г-:-^--ла;Г!:ГНДЯв i J-tt S •' • •* -^ - ' • "^ьИЬЛИО^ьКА | 1971 |
|
SU298069A1 |
| Устройство для программного управления станком | 1979 |
|
SU930261A1 |
| Устройство позиционного программ-НОгО упРАВлЕНия | 1978 |
|
SU807228A1 |
| Цифровое устройство для программного управления | 1986 |
|
SU1315940A2 |
| Способ автоматического управления электроприводом центрифуги и устройство для его осуществления | 1984 |
|
SU1292842A1 |
| Устройство для программного управленияпРиВОдОМ | 1978 |
|
SU798724A1 |
| СИСТЕМА УПРАВЛЕНИЯ И КОНТРОЛЯ ПАРАМЕТРОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2005 |
|
RU2295646C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2631974C2 |
| Устройство для управления электродвигателем постоянного тока | 1982 |
|
SU1080241A1 |
ЦИФРОВАЯ СИСТЕМА ПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ по авт.св.№557353, отличающаяся тем, что, с целью повышения надежности системы, в нее введены датчик скорости движения механизма и третий блок допускового контроля, состоящий из амплитудного дискриминатора, первого и второго элементов И и, элемента ИЛИ, выход датчика скорости соединен с вхо дом амплитудного дискриминатора, первый выход которого соединен с первым входом первого элемента И, второй выход - с первым входом второго элемента И, вторые входы первого и второго элементов И подключены к второ.му выходу сумматора, выходы перво го и второго элементов И соединены со ответственно с первым и вторым входами элемента ИЛИ, третий вход которого подключен к выходу сигнализатора останова привода, выход элемента ИЛИ соединен с третьим входом блока сигнализации отказа системы.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Цифровая система позиционного регулирования | 1976 |
|
SU557353A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
