1
Изобретение относится к области управления и регулирования и непосредственно может быть использовано для позиционHOfo программного управления положением нажимных винтов прокатных клетей.
Известна цифровая система позиционно- ftJ регулирования, содержащая программнозадающее устройство, сумматор, цифро-аналоговый преобразователь, блок управления двигателем, двигатель и датчики обратной связи 1. Однако такая система не имеет автоматического контроля работы всего оборудования системы.
Наиболее близкой по технической сущности к изобретению является система по- зиционнрго программного управления производственными механизмами, которая содержит программно-задающее устройство, выход которого подключен к первому входу сумматора, выход которого соединен со
входом Щ1фро-аналогового преобразователя и первым входом первого блока допускового контроля, выход которого подключен к первому входу блока сигнализации отказа «;нстемы, а второй вход - к выходу сигна
пизатора останова привода, выход цифро аналогового преобразователя через блок управления соединен с двигателем, вал которого соединен с первым и вто рым датчиками обратной связи, выход первого датчика обратной связи подключен о второму входу сумматора. Такое построение системы позволяет осуществлять визуалную индикацию ошибок. Однако в данной системе отсутствует возможность автоматического контроля работы схемы, охватываю щего бее звенья контура регулирования, включая и блоки контроля 2..
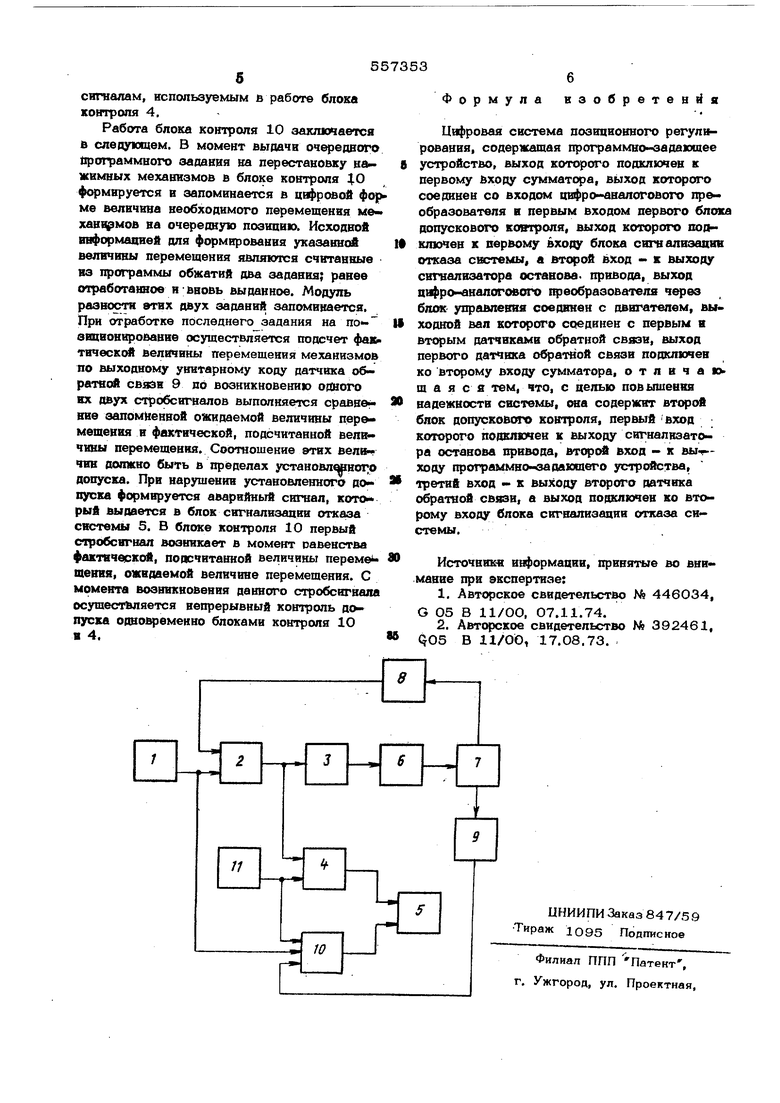
Цель изобретения - повышение надежности системы, достигается за счет того, что система снабжена вторым блоком допускового контроля, первый вход которого подключен к выходу сигнализатора останова привода, в горой вход-к выходу программнозадающего устройства, третий вход - к выходу второго датчика обратной связи, а выход подключен ко второму входу блока сигнализации отказа системы.
На чертеже дана функциональная схема системы. Система соцершит програ л но-аайаюшее устройство 1, выход которого подключен к первому входу сумматора 2, выход которого соединен со входом цифро-аналогового преоб разователя 3 и первым входом первого бл1 ка допускового контроля 4, выход которого подключен к первому входу блока сигналнзацнн отказа системы 5, выход цифро-аналогового преобразователя 3 через.блок управления 6 соединен с двигателем 7. вал которого соединен с датчиками обратной связи в,9, причем выход первого датчика обратной свази 8 подключен ко второму входу сумматора 2. Первы вход второго блока допускового контроля 10 подключен ко второму входу первого блока допускового контроля 4 и к выходу сигнализатора останова привода 11, второй вход - к выходу программно-задающего устройства 1, третий вход - к выходу второго датчика обратной связи 9, а выход подключен ко второму входу блока сигнализации отказа системы 5. Работа системы осуществляется следующим образом. При выдаче программно-задающим устройством 1 задания на обработку испол- нителы1ыми механизмами очередной позиции сумматор 2 формирует и выдает в циф ровой форме сигнал рассогласования на вход цн1 роавалогового преобразователя 3 шш управления двигателем 7. Сигнал рас- согласования образуется как разность фактического позиционного. положения исполнитвльшлх механизмов (по показаниям дат чика обратной связи 8) и программного задания. По мере обработки задания механизмами модуль указанной разности умень шается и в момент останова привода, в нормальном случае, должен быть в пределах установленного допуска. Контроль работы свстемы основан на выявлении случаев превышения установлен ного допуска при обработке программного задания. Контроль допуска осуществляется одновременно двумя блоками 4, 10. Блок 4 контролирует исправность трех звеньев KOI тура регул{фования: цифроаналогового преобразователя 3, блока управления двигателем 6, двигателя 7. Блок 10 контролирует исправность всех звеньев контура регулирования, т.е. сумматора 2, цифро-аналогового преобразователя 3, блока управления двигателем 6, двигателя 7 и датчика обратной связи 8, Наличие двух блоков контроля 4,1О позволяет контролировать исправность их самих по паритету. Для ис ключения одинаковых ошибок, возникающих QO из дновременно в обоих блоках контроля 4, 10 при их функционировании, на вход блока контроля 4 поступает информацня с выхода умматора 2, а на вход блока контроля 10 с выхода программно-вадающего устройства 1 и вспомогательного датчика обратной связи 9, например датчика импульсов. В качестве датчика обратной связи 9 может быть использован выход младшего разряда датчика обратной связи 8, если последний ос- нован на двоичном или двоично-десятичном коце, По окончании отработки очередного задания оба блока допускового контроля 4,1О ( в нормальном случае не вы дают сигналов о наруше НИИ установленного допуска. В случае отказа цифроаналогового преобразователя 3, блока управления двигателем 6 или двигателя 7 возможна недоработка или переработка программного задания, то есть превышение допуска. В данном случае оба блока контроля 4 и 10 формируют аварийный сигнал. При отказе сумматора 2 или да- чиков обратной связи 8, 9 аварийный сигнал формируется блоком контроля 10. Таким образом, обеспечивается автома тический контроль исправности всего оборудования системы. Контроль допуска первым блоком ковт роля 4 осуществляется по команде одного из двух стробсигиалов. Первый стробсигнал формируется внутри блока 4 в момент возникновения нулевого значения сигнала рассогласования. По этому сигналу включается непрерывный контроль допуска одновременно в блоке контроля 4 н 10 до выдачи очередного программного задания. Второй стробсигнал формируется сигна лизатором останова 11 двигателя в момевт остановки двигателя 7 и выдается в блок контроля 4, где он запоминается и выполняет функции аналогичные первому стробсигналу. Необходимость получения такого сигнала заключается в том, что при недоработке программного задания системой первый стробсигнал сформироваться не может, так как сигнал рассогласования к моменту остановки двигателя не принимал нулевого значения, Таким образом, в первом блоке контроля 4 в момент возникновения нулевого зна« ченвя сигнала рассогласования или останова привода контролируется величина допуска, и в случае превышения установленного, допуска выдается сигнал в блок сигнализации отказа системы 5. Контроль допуска вторым блоком KOHI роля 1О осуществляется по команде одного двух стробсигналов аналогичных строб

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система позиционного регулирования | 1983 |
|
SU1124254A2 |
| Устройство для программного управления станком | 1979 |
|
SU930261A1 |
| Цифровое устройство для программного управления | 1986 |
|
SU1315940A2 |
| Устройство позиционного программ-НОгО упРАВлЕНия | 1978 |
|
SU807228A1 |
| ВСГ-СОЮЗНАЯр'^-"Г-:-^--ла;Г!:ГНДЯв i J-tt S •' • •* -^ - ' • "^ьИЬЛИО^ьКА | 1971 |
|
SU298069A1 |
| РЕЗЕРВИРОВАННЫЙ ИСТОЧНИК ТОКА | 2013 |
|
RU2512890C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2563333C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2013 |
|
RU2534955C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2011 |
|
RU2527570C2 |
| Машина для укладки рыбы в банки | 1980 |
|
SU971204A1 |
