1
Изобретение относится к области автоматики и предназначено для использований в цифровых устройствах управления следягдим приводом.
Известно устройство управления следящим приводом, содержащее управляющее устройство, генератор импульсов, блок синхронизации, реверсивный счетчик, сравнивающее устройство, дешифратор, датчик обратной связи, усилитель и двигатель l.
Однако известное устройство имеет недостаточную точность.
Наиболее близким техническим решением к предлагаемому является корректирующее устройство для следящего электропривода, содержащее последовательно соединенные преобразователь , фазовый дискриминатор и сумматор управлякщих воздействий, датчик обратной связи, подключенный к соответствующему входу фазового дискриминатора, генератор тактовых импульсов, соединенный с преобразователем и датчиком обратной связи, последовательно соединенные дешифратор рассогласования, регистр памяти ошибки и сумматор сигнала компенсации, причем один вход дешифратора рассогласования cotаинен с поеобразователем, а другой - с выходом датчика обратной связи, выход преобразователя соединен с исполнительным входом сумматора сигнала компенса- .
дни, выход которого подключен к соответствующему входу сумматора управляющих воздействий. В этом устройстве осуществляется выработка допо.т1нительного сигнала компенсации
скоростной коррекции 2.
Недостатком устройства является ограниченное быстродействие, в частности, при частых изменениях направления ,и скорости движения, из-за
потерь времени на торможение.
Цель изобретения - повышение быстродействия устройства.
Поставленная цель достигается. тем, что в устройство для программного управления приводом, содержащее усилитель мощности, выход которого подключен ко входу исполнительного двигателя, и последовательно соединенные блок задания программы, реверсивный счетчик, блок сравнения и формирователь управлякяцего сигнала, второй вход которого подключен ко входу датчика скорости, а второй в-хол блока сравнения подключен к
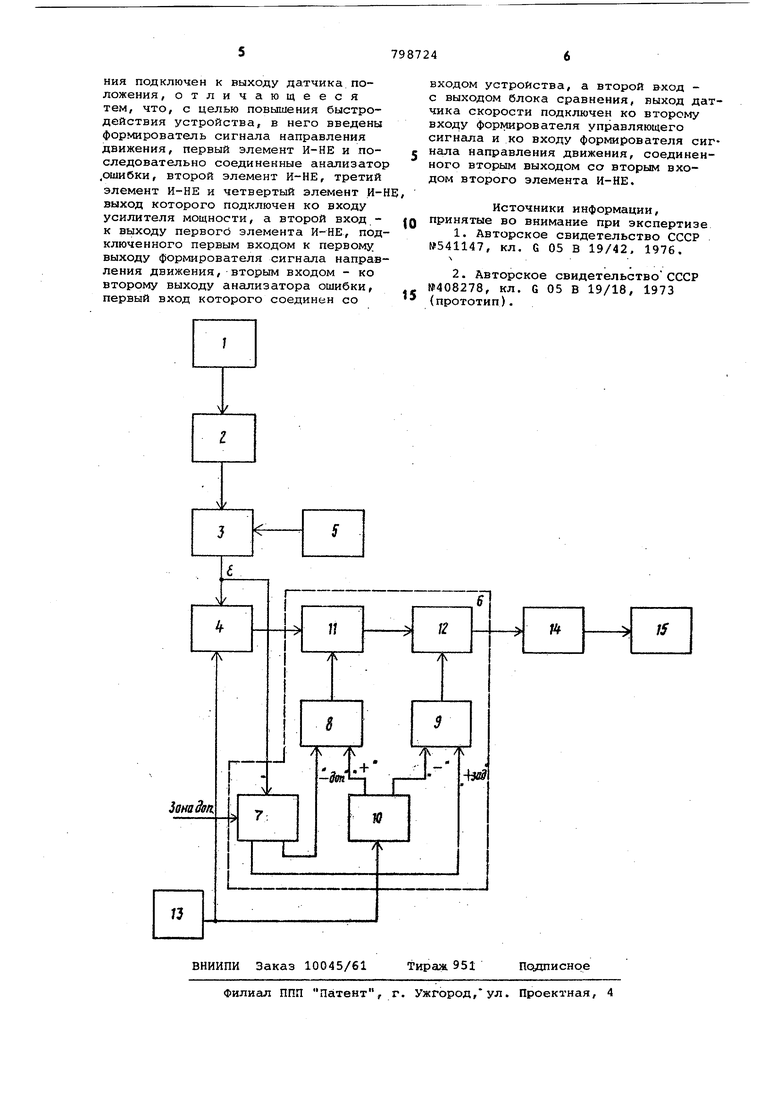
выходу датчика положения, введены формирователь сигнала направления движения, первый элемент И-НЕ и последовательно соединенные анализа тор ошибки, второй элемент И-НЕ/ третий элемент И-НЕ и четвертый эле мент И-НЕ, выход которого подключен ко входу усилителя мощности, а второй вход - к выходу первого элемент iH-HE, подключенного первым входом к первому выходу формирователя сигнала направления движения, а вторым входом - ко второму выходу анализатора ошибки, первый вход которого соединен со входом-устройства, второй вход - с выходом блока сравнени выход датчика скорости подключен ко второму ходу формирователя управляющего сигнала и ко входу формиров теля сигнала направления движения, соединенного вторым выходом со вторым входом второго элемента И-НЕ. На чертеже представлена блок-схе ма устройства, содержащая блок 1 задания программы, реверсивный счет чик 2, блок 3 сравнения, формирователь 4 управляющих сигналов, датчик 5 положения исполнительного механизма , блок б экстренного торможения, включающий анализатор 7 ошибки второй 8 и первый 9 элементы И-НЕ, формирователь 10 сигнала направлени движения, третий 11 и четвертый 12 элементы И-НЕ, датчик 13 скооости, усилитель 14 мощности, а также испо нительный двигатель 15 исполнительного механизма. Устройство работает следующим об разом. Блок 1 выдает информацию о перемещении в виде последовательности импульсов, поступающих в счетчик 2. Частота следования управляющих импульсов определяет скорость движения исполнительного механизма. Один импульс соответствует элементарному шагу перемещения. Блок 3, сравнивая состояние счетчика 2 с кодом текущего положения, снимаемого с датчика 5, вырабатывает сигнал рассогласования, поступающий на формирователь 4, который вырабатывает управляющие импульсы, ширина которых модулируется пропорционально ве личине рассогласования. Сигнал формирователя 4 через эле менты 11 и 12 и усилитель 14 управляет двигателем 15. Для повышения устойчивости работы устройство охва чено отрицательной обратной связью по скорости, т.е. сигнал, вырабатываемый датчиком 13, в формирователе 4 суммируется с сигналом рассогласо вания. Для сокращения времени торможени при изменениях направления и остано ках управляющий сигнап :: формирователя 4 подается на усилитель 14 через элементы блока 6, который осу ществляет формировачие сигналов форсировки торможения. При этом сигналы с датчика 13 поступают на формирователь 10, который вырабатывает в зависимости от сигналы направления движения. В анализатор 7 блока 6 вносится величина выбранной зоны отработки (ЗОНЛдоп которая устанавливается меньшей допустимой ошибки. На другой вход анализатора 7 поступает сигнал рассогласования с блока 3. При превышении сигналом рассогласования, установленной зоны на выходе анализатора 7 в зависимости от энака сигнала рассогласования, указывающего на направление движения, уменьшающее величину рассогласования,- формируются сигналы +зад и -зад. Эти сигналы поступают на соответствуюшяе входы элементов И-НЕ 8 и 9. На; вторые входы этих элементов поступают сигнаты + и -, указывающие на действительное направление движения. При совпадении сигнала +зад. и + на выходах элемента 8 и +зад и - на входах элемента 9 формируются уровни О таким образом, что при движении в направлении ct- уровень О может быть на выходе элемента 8, при движении в направлении - - на выходе элемента 9. При наличии любого из этих сигналов вход усилителя 14 отключается от выхода формирователя 4. При наличии уровня О на /выходе элемента И-НЕ 9, на вход усилителя 14 с выхода элемента 12 подается логический уровень 1, при наличии уровня О на выходе элемента 9 логический уровень О. По этим . сигналам усилитель 14 формирует максимальное управляющее воздействие на двигатель в сторону, препятствующее продолжению движения по инерции. Сигнал форсировки торможения снимается при величине ошибки рассогласования, не превышающей ЗОНЫ доп. и при изменении ее знака. Введение указанных элементов позволяет фиксировать режим торможения двигателя, чем обеспечивается возможность значительного повышения скорости при сохранении заданной динамической точности. Формула изобретения Устройство для программного управения приводом, содержгидее усилитель ощности, выход которого подключен ко входу исполнительного двигателя последовательно соединенные блок задания программы, реверсивный счетик, блок сравнения и формирователь правляющего сигнала, второй вход оторого подключен ко входу датчика корости, а второй вход блока сравне
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПРИВОДОМ | 1979 |
|
SU826284A1 |
| Система программного управления | 1979 |
|
SU817669A1 |
| Цифровая следящая система управленияпЕРЕМЕщЕНиЕМ Об'ЕКТА | 1979 |
|
SU798726A1 |
| Устройство для программного управления | 1979 |
|
SU849144A2 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Вентильный электропривод | 1991 |
|
SU1829101A1 |
| Цифровая следящая система | 1980 |
|
SU934446A1 |
| Двухканальное устройство для управления технологическим объектом | 1978 |
|
SU723513A1 |
| Устройство для контроля дорожногодВижЕНия | 1979 |
|
SU830492A1 |
| Цифровая следящая система | 1980 |
|
SU924664A1 |
