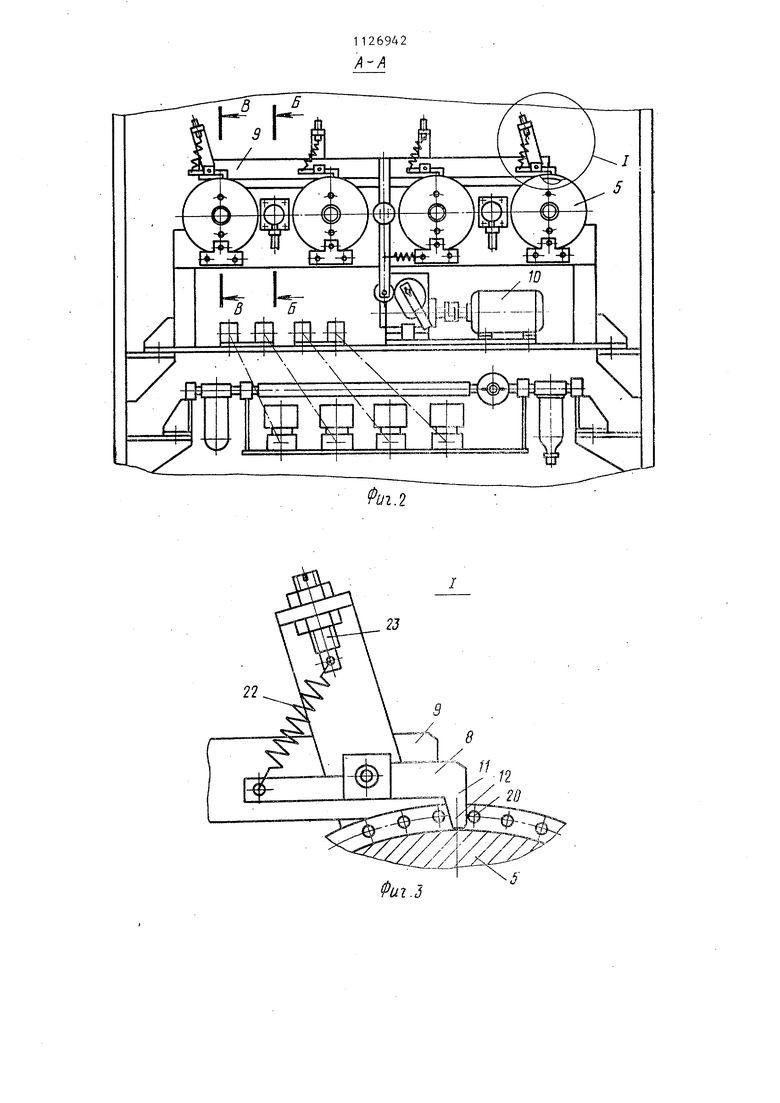
Изобретение относится к области машиностроения и предназначено для контроля командоаппаратов с кулачковым барабаном. Известно устройство для контрол электрических параметров изделий, содержащее блок управления, датчик отсчетную шкалу, визир и механизм перестройки. Недостатки известного устройства - сложность процесса контроля и его низкая точность. Известен также стенд, содержащи станину, шкаф управления и устройство для подключения испытуемых изделий к аппаратуре сравнения. Недостатком известного устройст ва является низкая то Гность контро ля командоаппаратов при групповом контроле, так как при синхронном повороте кулачковых барабанов нескольких командоаппаратов на один и тот же угол кулачки одних команд аппаратов зажимают контактные пары а других нет из-за большого разброса углов срабатьшания кулачков различных командоаппаратов и после ние командоаппараты могут быть лож но забракованы. Цель изобретения - повьш1ение то ности контроля командоаппаратов при групповом контроле. Цель достигается тем, что на стенде для контроля командоаппаратов , содержащем станину для устано .ки командоаппаратов , устройства уп равления и устройства подключения командоаппаратов к контрольному устройству, установлено устройство дискретного вращения с цевочными колесами по числу контролируемых к мандоаппаратов, снабженными муфтами для сопряжения с валами соответствующих командоаппаратов, и с собачками поворота цевочных колес, шарнирно закрепленными на общей штанге, пневматически связанной с приводом возвратно-поступательного движения, причем собачки сопряжены с цевочными «юлесами по вертикальной и наклонной поверхностям, соот ветствующим прямому и обратному ходу командоаппаратов, снабженных ограничителями обратного хода, а устройство для подключения командо Паратов выполнено в виде корпуса, установленного на станине с возмож ностью прода.1ьного возвратно-посту патёльного перемещега1Я и снабжено 2 кассетами для фиксированного размещения командоаппаратов с размещенными по обеим сторонам корпуса коммутирующими блоками с подпружиненными контактами, причем коммутиругощие блоки установлены с возможностью поперечного возвратно-поступательного перемещения относительно корпуса, а устройство управления подключено к приводу устройства дискретного вращения и устройства подключения командоаппаратов. На фиг. 1 показан стенд, общий вид; на фиг. 2 - разрез А-А на 3- узел 1 на 1; на фиг. фиг. 4- разрез Б-Б на 2; на фиг. фиг. 5- разрез В-В на. 2; на фиг. фиг. фиг. 2. Стенд для контроля командоаппаратов содержит станину 1 для установки командоаппаратов 2, устройство управления 3 и устройства подключения 4 командоаппаратов 2 к контрольному устройству (не показано) . На стенде установлено устройство дискретного вращения с цевочными колесами 5 по числу контролируемых командоаппаратов 2, снабже ными муфтами 6 для сопряжения с валами 7 соответствующих командоаппаратов 2, и собачками 8 поворота цевочньпс колес 5, шарнирно закрепленны- ми на общей штанге 9,, кинематически связанной с приводом 10 возвратно-поступательного движения. Собачки 3 сопряжены с цевочными колесами 5 по вертикальной и наклонной поверхностям 11, 12, соответствующим прямому и обратному ходу командоаппаратов 2, снабженных ограничителями обратного хода (не показаны) . Устройства подключения 4 командоаппаратов 2 выполнено в виде корпуса 13, установленного на станине 1с возможностью продольного возвратно-поступательного вращения, и. снабжено кассетами 14 для фиксированного размещения командоаппаратов 2с размещенными по обеим сторонам корпуса 13 коммутирующими блоками 15 с подпружиненными контактами 16. Коммутируюш 1е блоки 15 установлены с возможностью поперечного возвратно-поступательного перемещения относительно корпуса 13, а устройство управления 3 подключено к приводу 10 устройства дискретного вра- ,
щения и устройства подключения 4 командоаппаратов 2.
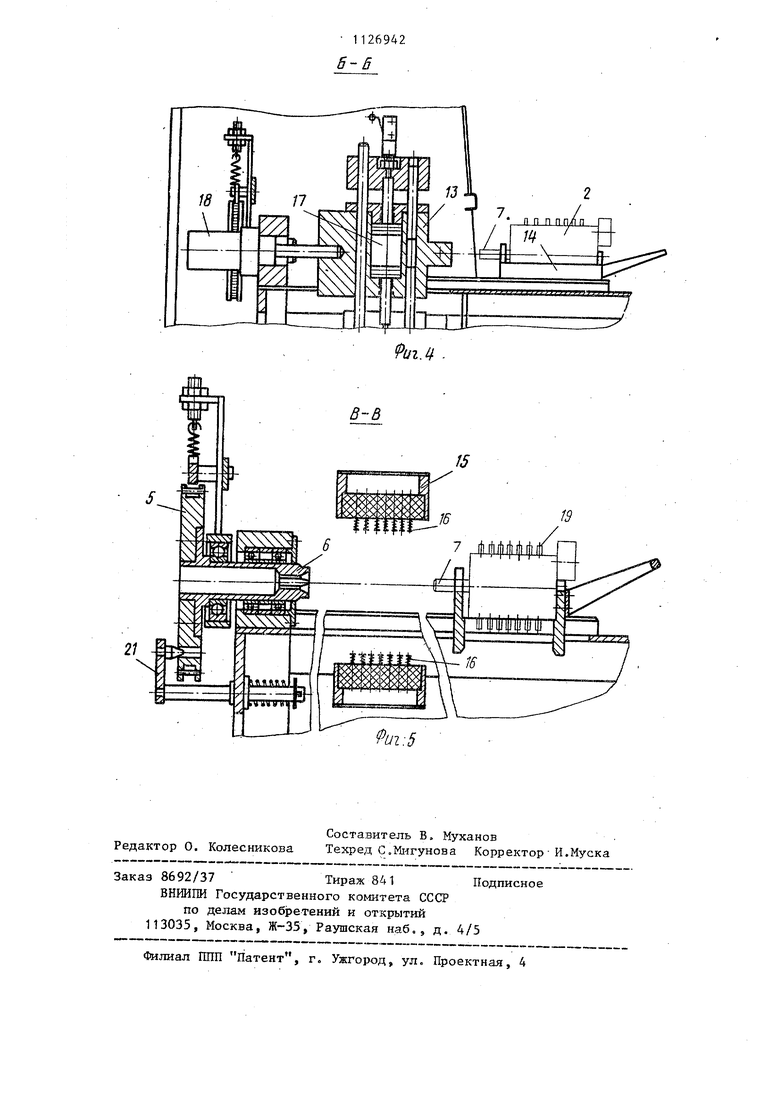
Коммутирующие блоки 15 перемещаются относительно корпусов 13 с помощью приводов 17 корпуса 13 устройств подключения 4 с помощью приводов 18. Командоаппараты 2 снабжены контактами 19. Цевочные колеса 5 снабжены цевками 20 и взаимодействуют с фиксаторами 21, сопряженными с корпусами 13.
Собачки 8 поджаты к цевочным колесам 5 пружинами 22 с регулировочными винтами 23.
Стенд работает следующим а,бразом.
Командоаппараты 2 вставляют в кассеты 14 и фиксируют в них поворотом ручки байонетного устройства (не показано)5 затем вручную перемещают все кассеты 14 корпусу 13 (не показаны) до упора. При этом срабатьгоают приводы 17 и коммутирующие блоки 15 сходятся, подпружиненные контакты 16 упираются в контакты 19 командоаппаратов -2, подключая последние к схеме контроля стенда. Срабатывают приводы 18 и устройства 4 перемещаются влево (фиг. 4), фиксаторы 21 освобождают цевочные колеса 5, валь 7, входят в зацепление с шлицевыми муфтами 6. Включают привод 10, который осущестляет возвратно-поступательное перемещение штанги 9, в результате при прямом движении (вправо, фиг. 3) штанги 9 собачки 8, шарнирно закреплённые на штанге 9, нажимают на цевки 20 и поворачивают цевочные колеса 5 на один шаг, при этом муфты 6 вращают на один шаг валы 7; при обратном движении щтанги 9 собачки 8 нажимают на цевки 20 наклонными поверхностями 12, поворачивая цевочные колеса 5 обратно, которые своими муфтами 6 поворачивают обратио и валы 7, последние набегают на огрничители обратного хода и останавливаются, а собачки 8 проскальзывают цевки 20 и совместно с штчнгой 9 продолжают возвратное движение до
исходного положения, срабатывает датчик (не показан) включения схемы контроля.
Шаг вращения цевочных колес 5 выбирается таким образом, чтобы обеспечить срабатывание всех командоаппаратов на каждом из указанных углов сраб.тывания.
При возвратном движении штанги 9 одни валы 7 набегают на свои ограничители обратного хода раньше, другие - позже и останавливаются на каждом из заданных углов срабатывания . В результате не происходит сложения погрешностей срабатывания на каждом заданном угле.
Возвратно-поступательное движение .штанги 9 повторяется до тех пор, пока цевочные колеса 5 (валы 7) не совершат полный оборот, затем привод 10 отключается, а привод 18 включается и устройства 4 перемещаются вперед (фиг. 4), фиксаторы 21 стопорят цевочные колеса 5, фиксируя устройство дискретного вращения в исходном положении.
В крайнем правом положении устройств 4 подается электропитание к двигателям (не показ.аны) командоаппаратов 2 для проверки их функционирования при непрерьшном вращении. По истечении заданного времени двигатели командоаппаратов 2 отключаются, а привод 17 включается и коммутирующие блоки 15 расходятся, разъединяя при этом контакты 16 и 19. Затем кассеты 14 вручную перемещают назад, снимают проверенные Командоаппараты.
Применение в стенде для контроля командоаппаратов устройства дискретного вращения, выполнение устройства для подключения командоаппаратов в виде корпуса, установленного на станине с возможностью продольного возвратно-поступательного перемещения, снабженного кассетами Д.ПЯ фиксированного размещения командоаппаратов, коммутирующими блоками, повьш1ает точность контроля командоаппаратов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Револьверный питатель для подачизАгОТОВОК B шТАМп | 1979 |
|
SU837506A1 |
| Установка для контактной сварки | 1978 |
|
SU764893A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 2001 |
|
RU2223430C2 |
| Ленточно-шлифовальный станок | 1981 |
|
SU1006177A1 |
| Стенд для испытания на герметичность изделий | 1977 |
|
SU789694A1 |
| УСТАНОВКА ДЛЯ СЪЕМА ОГНЕУПОРНЫХ ИЗДЕЛИЙ | 1973 |
|
SU364445A1 |
| Устройство для двусторонней обработки деталей | 1981 |
|
SU1013237A1 |
| Командоаппарат для управления исполнительными механизмами станков | 1987 |
|
SU1474626A1 |
| Станок для заточки зубьев пил | 1991 |
|
SU1808528A1 |
| ПЛАНЕТАРНО-ЦЕВОЧНЫЙ ЭЛЕКТРОПРИВОД | 2019 |
|
RU2714568C1 |

СТЕНД ДЛЯ КОНТРОЛЯ КОМАНДОАППАРАТОВ 5 содержащий станину для установки командоаппаратов, устройства управления и устройства подключения командоаппаратов к контрольному устройству, отличающийся тем, что, с целью обес-печения большей точности контроля командоаппаратов при групповом контроле, н.а стенде установлено устройство дискретного вращения с цевочными колесами по .числу контролируемых командоаппаратов, снабженными муфтами для сопряжения с валами соответствующих командоаппаратов, и с собачкамиповорота цевочных колес. шарнирно закрепленными на общей .штанге, кинематически связанной с приводом возвратно-поступательного движения, причем собачки сопряжены с цевочными колесами по вертикальной и наклонной поверхностям,соответствующим прямому и обратному ходу командоаппаратов, снабженных ограничителями обратного хода, а устройство для подключения командоаппаратов выполнено в виде корпуса, установленного на станине с возможностью продольного возвратно-поступательного перемещения и снабжено кассетами для фиксированного i размещения командоаппаратов с размещенными по обеим сторонам корпуса (Л коммутирующими блоками с подпружиС ненными контактами, причем коммутирующие блоки установлены с возможностью поперечного возвратно-поступательного перемещения относительно корпуса, а устройство управления подключено к приводу устройства ю дискретного вращения и устройству Од подключения командоаппаратов. СО 1 ю
1126942 б-б
игЛ .
Ui:5
