Изобретение относится к машиностроеию, а именно к средствам контроля убчатых передач.
Известно устройство для контроля . инематической погрешности зубчатых s ередач, содержащее датчики угла поорота начального и конечного звеньев ередачи, связанные с ними делители астоты и фазовый компаратор ОJ
Недостатком этого устройства яв- 10 ляется то, что точность измерения зависит от стабильности скорости вращения начального звена и не позволяет производить контроль на режимах, близких к эксплуатационным, т.е. 15 выявить высокочастотные составляю1цие динамического состояния передачи.
Наиболее близким к изобретению по технической сущности является устройство для контроля кинематической пог-20 решности зубчатых передач, содержащее импульсные датчики угла поворота начального и конечного звеньев передачи, первый 1накапливающий сумматор,, первый вход которого соединен с дат- 25 чиком начального звена, первый кодирукиций переключатель, выход которого соединен со вторым входом первого накапливающего сумматора, второй накапливающий сумматор, первый вход 30которого соединен с датчиком конечного звена, второй кодирующий переключатель, выход которого соединен со вторым входом второго накапливающего сумматора, блок алгебраического 35 сложения, первый вход которого подключен к выводу первого накапливающего сумматора, а второй вход - к выходу второго накапливающего сумматора С23 .40
Недостатком известного устройства является невозможность вьвделения высокочастотных составляющих путем нахождения производных, что ограничивает его функциональные возможности. 45
Цель изобретения - расширение функциональных возможностей ус роДсува..
Поставленная цель достигается тем что устройство для контроля кинемати-50 ческой погрешности зубчатых передач, содержащее импульсные датчики угла поворота начального и конечного звеньев передачи, первый накапливающий сумматор, . первый вход которого 55 соединен с датчиком начального звена первый кодирующий переключатель, выход которого соединен со вторым входом .первого накапливающего сумматора второй накапливающий сумматор, первый вход которого соединен с датчиком конечного звена, второй кодирую1ЦИЙ переключатель, выход которого соединен со вторым входом второго накапливающего сумматора, блок алгебраического сложения, первый вход которого подключен к выходу первого накапливающего сумматора, а второй вход - к выходу второго накапливающего сумматора, снабжено третьим накапливающим сумматором, первый вход которого соединен с датчиком конечного звена, третьим и четвертым кодирующими переключателями, выход третьего кодирующего переключателя подключен ко второму в:;оду третьего накапливающего сумматора, делителем частоты, первый вход которого соединен с датчиком начального звена, а второй вход - с выходом четвертого кодирующего переключателя, первым регистром сдвига, первый вход которого соединен с выходом третьего накапливающего сумматора, второй входс выходом делителя частоты, первым вычислителем, первый вход которого соединен с выходом первого регистра сдвига, второй вход - с выходом третьего накапливающего сумматора, вторым регистром сдвига, первый вход которого соединен с выходом первого вычислителя, а второй вход - с выходом делителя частоты, вторым вычислителем, первый вход которого соединен с выходом первого вычислителя, а второй вход - с выходом второго регистра сдвига.
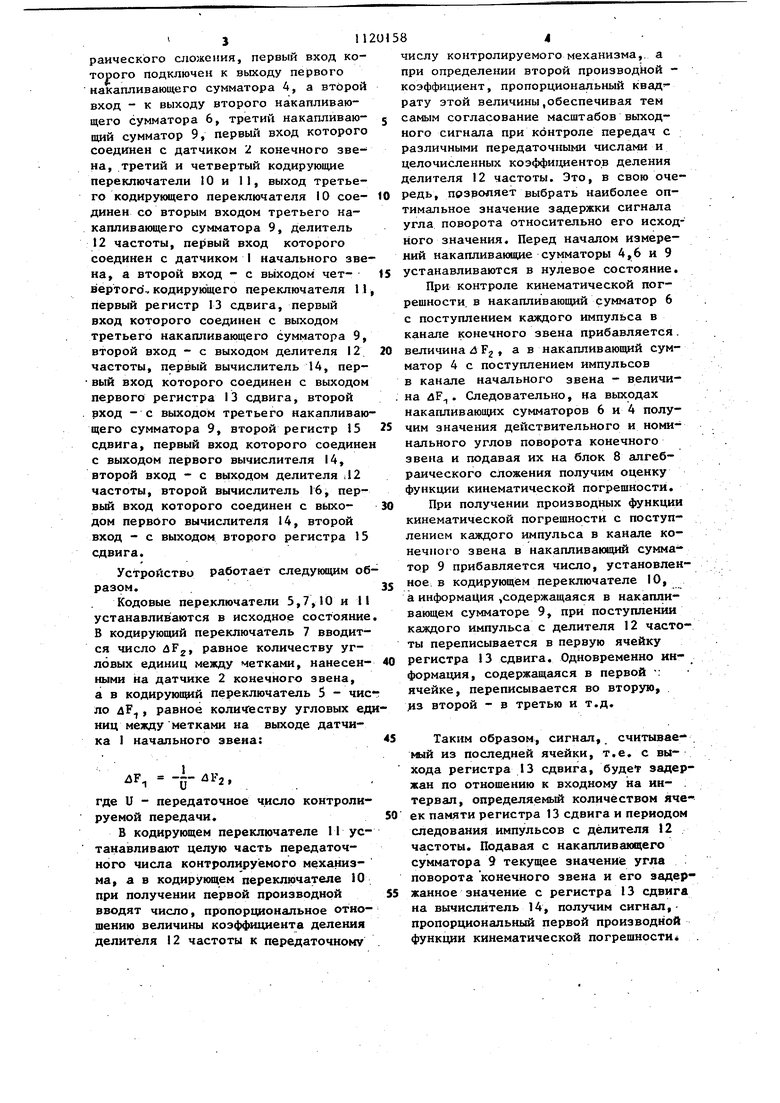
На чертеже изображена структурная схема устройства для контроля кинематической погрешности зубчатых передач.
Устройство включает в себя датчик 1 и 2 угла поворота начального и конечного звеньев передачи 3, первый накапливающий сумматор 4, первый вход которого соединен с датчиком I начального звена, первый кодирующий переключатель 5, выход которого соединен со вторым входом первого накапливающего сумматора 4, второй накапливающий сумматор 6, первый вход которого соединен с датчиком 2 конечного звена, второй кодирующий переключатель 7, выход которого соединен со вторым входом второго накапливающего сумматора 6, блок 8 алгеб 311 раического сложения, первый вход которого подключен к выходу первого накапливающего сумматора 4, а второй вход - к выходу второго накапливающего сумматора 6, третий накапливающий сумматор 9, первый вход которого соединен с датчиком 2. конечного звена, третий и четвертый кодирующие переключатели 10 и 11, выход третьего кодирующего переключателя 10 соединен со вторым входом третьего накапливающего сумматора 9, делитель 12 частоты, первый вход которого соединен с датчиком I начального зве на, а второй вход - с выходом четвертого, кодирукадего переключателя 11 первый регистр 13 сдвига, первый вход которого соединен с выходом третьего накапливающего сумматора 9, второй вход - с выходом делителя 12 частоты, первый вычислитель 14, пер вый вход которого соединен с выходом первого регистра 13 сдвига, второй рход - с выходом третьего накапливаю щего сумматора 9, второй регистр 15 сдвига, первый вход которого соедине с выходом первого вычислителя 14, второй вход - с выхрдом делителя Л2 частоты, второй вычислитель 16, первый вход которого соединен с выходом первого вычислителя 14, второй вход - с выходом второго регистра 15 сдвига. Устройство работает следуюцим об разом. Кодовые переключатели 5,7,10 и II устанавливаются в исходное состояние В кодирующий переключатель 7 вводится число AFg, равное количеству угловых единиц между метками, нанесенными на датчике 2 конечного звена, а в кодирующий переключатель 5 - чис ло 4F, равное колич еству угловых ед ниц между метками на выходе датчика 1 начального эвена: F, -1-ЛК2. где и - передаточное число контролируемой передачи. В кодирующем переключателе II устанавливают целую часть передаточного числа контролируемого механизма, а в кодирующем переключателе 10 при получении первой производной вводят число, пропорциональное отношению величины коэффициента деления делителя 12 частоты к передаточному 8 числу контролируемого механизма,, а при определении второй производной коэффициент, пропорциональный квад рату этой величины,обеспечивая тем самым согласование масштабов выходного сигнала при контроле передач с различными передаточными числами и целочисленных коэффициентов деления делителя 12 частоты. Это, в свою очередь, позволяет выбрать наиболее оптимальное значение задержки сигнала угла поворота относительно его исходного значения. Перед началом измерений накапливающие сумматоры 4,6 и 9 устанавливаются в нулевое состояние. При контроле кинематической погрешности, в накапливающий сумматор 6 с поступлением каждого импульса в канале конечного звена прибавляется. величина 4Fj, а в накапливающий сумматор 4 с поступлением импульсов в канале начального звена - величина dF. Следовательно, на выходах накапливающих сумматоров 6 и 4 получим значения действительного и номинального углов поворота конечного звена и подавая их на блок 8 алгебраического сложения получим оценку функции кинематической погрешности. При получении производных функции кинематической погрешности с поступлением каждого импульса в канале конечного звена в накапливающий сумматор 9 прибавляется число, установленное. в кодирующем переключателе 10, а информация содержащаяся в накапливающем сумматоре 9, при поступлении каждого импульса с делителя 12 частоты переписывается в первую ячейку регистра 13 сдвига. Одновременно информация, содержащаяся в первой ; ячейке, переписывается во вторую, из второй - в третью и т.д. Таким образом, сигнал, считывае- . мый из последней ячейки, т.е. с выхода регистра 13 сдвига, будет задержан по отношению к входному на интервал, определяемый количеством ячеек памяти регистра 13 сдвига и периодом следования импульсов с делителя i2 частоты. Подавая с накапливающего сумматора 9 текущее значение угла : поворота конечного звена и его задержанное значение с регистра 13 сдвига на вычислитель 14, получим сигнал,пропорциональный первой производной функции кинематической погрешности $11 Аналогично, для получения второй производной сигнал, снимаемый с выхода вычислителя 14, задерживают с помощью регистра 15 сдвига на интервалы, кратные периодам следования импульсов с делителя 12 частоты, и вычитают задержанные значения из исходного с ПОМО1ЦЫО вычислителя 16. 8 Использование изобретения повысить точность определения высокочастотных составляющих кинематической погрешности, что позволит более эффективно исследовать динамические характеристики, зубчатых механизмов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля кинематической погрешности зубчатых передач | 1983 |
|
SU1128109A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1231398A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1237902A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU1024699A1 |
| Устройство для анализа кинематической погрешности зубчатых передач | 1984 |
|
SU1227945A1 |
| Способ контроля кинематической погрешности зубчатых передач | 1980 |
|
SU945637A1 |
| Параллельно-последовательный аналого-цифровой преобразователь | 1985 |
|
SU1305851A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1180683A1 |
| Интегродифференциальный вычислитель | 1981 |
|
SU1007105A1 |
| Цифроаналоговый преобразователь с автоматической коррекцией нелинейности | 1985 |
|
SU1302435A1 |
УСТРОЙСТВО деш КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ЗУБЧАТЫХ ПЕРЕДАЧ, содержащее импульсные датчики угла поворота начального и конечного звеньев передачи, первый накатшивающий сумматор, первый вход которого соединен с датчиком началь|1ого звена, первый кодирующий переключатель, выход которого соединен с вторым входом первого накапливающего сумматора, второй накапливающий сумматор, первый вход которого соединен с датчиком конечного звена, второй кодирующий переключатель, выход которого с эединен со вторым входом второго накапливающего сумматора, блок алгебраического сложения, пер- . вый- вход которого подключен к выходу первого накапливающего сумматора, а второй вход - к выходу второго накапливающего сумматора., отличающееся тем, что, с целью расширения функциональных возможностей устройства, оно снабжено третьим накапливакт1им сумматором, первый вход которого соединен с датчиком конечного звена, третьим и четвертым кодирующими переключателями, выход третьего кодирующего переключателя подклю- чей ко второму входу третьего накапливающего сумматора, делителем частоты, первый вход которого соединен с датчиком начального звена, а второй вход - с выходом четвертого ко- дирующего переключателя, первым ре(Л гистром сдвига, первый вход которого соединен с выходом третьего накапливающего сумматора, второй вход с выходом делителя частоты, первым вычислителем, первый вход которого соединен с выходом первого регистра . сдвига, второй.вход - с выходом Is3 третьего накапливающего сумматора, вторым регистром сдвига, первый вход которого соединен с выходом первого ел вычислителя, а второй вход - с выхо00 дом делителя частоты, вторым вычислителем, первый вход которого соединен с выходом первого вычислителя, а второй вход - с выходом второго регистра сдвига.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приборы кинематического контроля | |||
| М., Машиностроение, 1981, с.18-21 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ контроля кинематической погрешности зубчатых передач | 1980 |
|
SU945637A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
