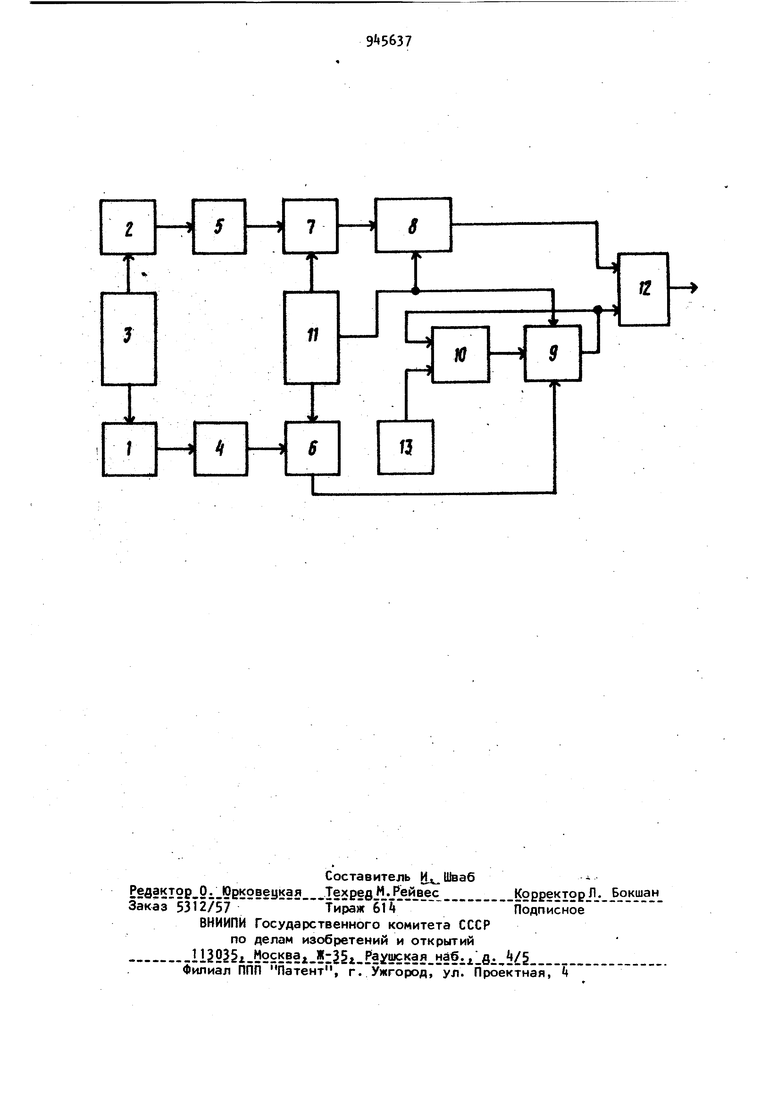
Изобретение относится к техничес- КИМ измерениям в машиностроении, а именно, к технике контроля кинематической погрешности зубчатых передач. Известен способ контроля кинематической погрешности зубчатых передач, заключающийся в том, что датчики уг.ч лов поворота устанавливают на начальном и конечном звеньях контролируемой передачи, снимают с них импульсные сигналы, согласовывают их по частоте и по разности количества импульсов, поступивших с датчиков, определяют кинематическую погрешность рЗНедостатком способа является то, что частотное преобразование импульсов всегда вносит дополнительную погрешность в результат контроля. Наиболее близким к изобретению по тЧехнической сущности и достигаемому результату является способ контроля кинематической погрешности передач, заключающийся в том, что с установленных на начальном и конечном звеньях контролируемой передачи импульсных датчиков считывают импульсы, определяют их весовые значения и по ним судят о кинематической погрешности f2. Основным недостатком способа явля-; ется низкая точность контроля, обус- ловленная тем, что при одновременном поступлении импульсов на входы счетчика через время, меньшее времени окончания переходных процессов, счетчик переходит в неопределенное состояние, и число импульсов на его выходе не соответствует действительному значению кинематической, погрешности. Цель изобретения - повышение точ ности контроля. Указанная цель достигается тем,. что согласно способу контроля кинематической погрешности зубчатых передач, заключающемуся в том, что с установленных на начальном и конечном звеньйх контролируемой передачи импульсных датчиков считывают импуль9сы и определяют их весовые значения, по весовым значениям импульсов, снимаемых с датчиков начального и конеч ного звеньев, оп ределяют текущие зна чения действительного и номинального углов поворота конечного звена по модулю большему, чем удвоенное макси мальное значение конематической погрешности, а последнюю контролируют по разности полученных текущих значений действительного и номинального углов поиорота конечного звена, причем разность определяют по тому же модулю. На чертеже представлена блок-схема устройства для осуществления способа . Устройство содержит импульсные датчики 1 и 2, установленные на начальном и конечном звеньях контролируемой передачи.3. Выходы датчиков 1 и 2 через формирователи k и 5 соединены с ключами 6 и 7. Выход ключа 7 св§зан с счетчиком.8, а ключа 6 - с регистром 9 памяти, с которым соединены сумматор 10 и блок 11 управления. Сумматор 12 по модулю М соединен с выходами счетчика 8 и регистром 9- Блок 11 управления связан с ключами 6 и 7 и счетчиком 8. Кодирующий переключатель 13 подключен к одному из входов сумматора 10, Способ осуществляется следующим образом. Преварительно задают весовые значения импульсов, поступающих от датчиков 1 и 2 начального и конечного звеньев передачи 3, равные, Hanpw«iep l Т П 2. Р®Д точное отношение зубчатой передачи З m - число импульсов на оборот вала датчика 2 конечного звена, п - число импульсов на оборот вала датчика 1 начального звена. Заданный весовой коэффициент, соответствующий поступлению импульсов по каналу датчика 1 начального звена, устанавливается на кодирующем пе реключателе 13- После включения устройства блок 11 управления устанавли вает счетчик 8 и регистр 9 памяти в исходное состояние. После нажатия кнопки пуска ( не показана ) по команде блока 11 управления открываются ключи 6 и 7, которые начинают пропус кать сформированные из сигналов датчиков 1 и 2 формирователя 4 и 5 импульсы на вход счетчика 8 и на вход 4 управления записью в регистр 9 памяти. В результате в счетчике 8, регистре 9 памяти и в сумматоре 10 вычисляются коды, пропорциональные те- кущим действительному и номинальному углам поворота конечного звена, но смещенные на величину, определяемую начальной установкой сметчика 8 и регистра 9 памяти,взятым по модупо М. Сумматор 12 вычисляет по модулю текущую разность значений действительного и номинального углов поворота канечного звена. Эта разность пропорциональна величине кинематической погрешности контролируемой передачи 3. Для исклочения неоднозначности rto-казаний сумматора 12 необходимо, чтобы величина модуля М, по которому определяются текущие значения номинального и действительного углов поворота конечного звена передачи 3, была более,чем в два раза больше максимального значения кинетической погрешности контролируемой передачи 3. Предлагаемый способ позволяет повысить точность контроля вследствие исключения погрешностей, вызванных преобразованием импульсов датчиков начального и конечного звеньев передачи. Формула изобретения Способ контроля кинематической погрешности зубчатых передач, заключающийся в том, что с установленных на начальном и конечном звеньях контролируемой передачи импульсных датчиков считывают импульсы и определяют их весовые значения, отличающийся тем, что, с целью повышения точности контроля, по весовым датзначениям импульсов, снимаемых с чиков начального и конечного звеньев, определяют текущие значения действительного и номинального углов поворота конечного звена по модулю большему, чем удвоенное максимальное значение кинематической погрешности, а последнюю контролируют по разности полученных текущих значений действительного и номинального углов поворота конечного звена, причем разность .определяют по тому же модулю. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № , кл. GDI В 7/28, 1971. 2. Авторское свидетельство СССР ff 579536, кл. G01 В 7/28, 1975 (прототип).
11
Ъ iT
I
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU1024699A1 |
| Устройство контроля кинематическойпОгРЕшНОСТи зубчАТыХ пЕРЕдАч | 1979 |
|
SU847009A1 |
| Устройство для анализа кинематической погрешности зубчатых передач | 1984 |
|
SU1227945A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1983 |
|
SU1120158A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1983 |
|
SU1128109A1 |
| Устройство для контроля кинематической погрешности передач | 1985 |
|
SU1270550A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1237902A1 |
| Устройство для измерения мертвого хода зубчатых передач | 1987 |
|
SU1428910A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1983 |
|
SU1116306A1 |
| Устройство для автоматического контроля и регулирования режима безнапорного трубопроводного гидротранспорта | 1981 |
|
SU1000359A2 |
13
