I 1
Изобретение относится к машиностроению, а именно к средствам контроля зубчатых колес.
Цель изобретения - повьшение точности путем исключения из результата измерения погрешностей датчиков начального и конечного звеньев контролируемой передачи.
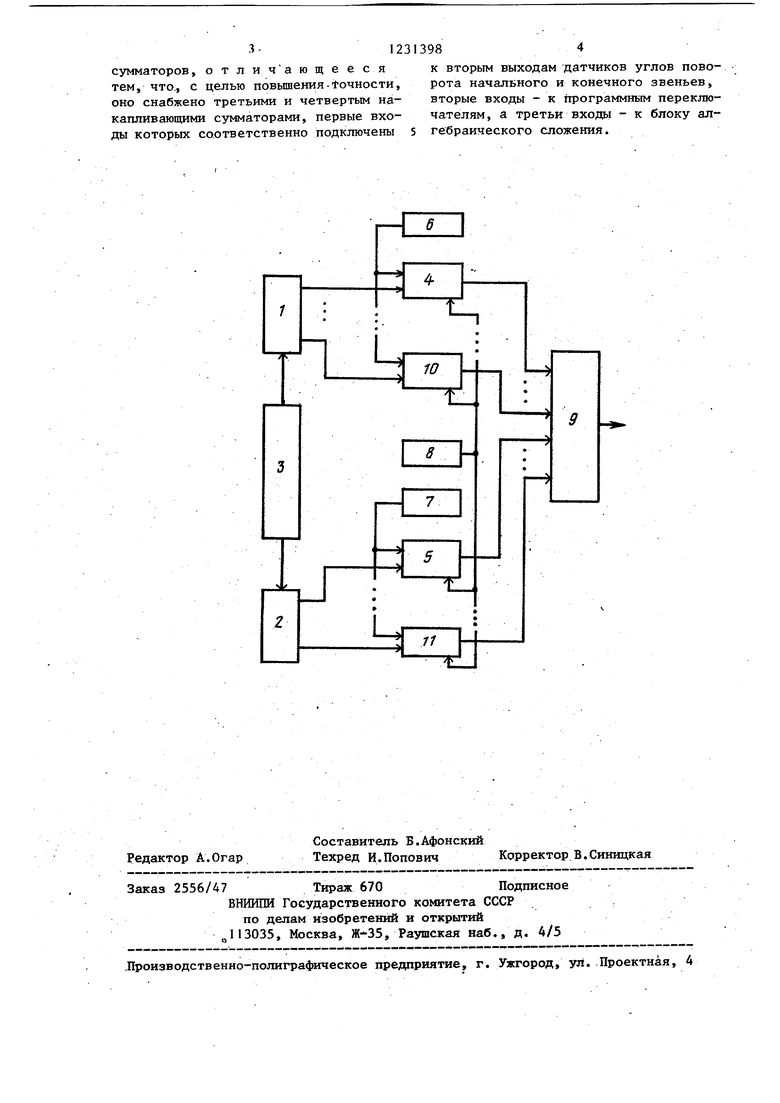
На чертеже изображена структурная блок-схема устройства для контроля кгинематической погрешности зубчатых передач;.
Устройство содержит импульсные датчики 1 и 2 углов поворота начального и конечного звеньев контролируемой передачи 3, первый и второй накапливающие сзгмматоры 4 и 5, соединенные первыми входами с первьши выходами датчиков 1 и 2, два программных переключателя 6 и 7, подключённые к вторым входам первого и второго накапливающих сумматоров 4 и 5, блок 8 управления, выход которого со единен с третьими входами накапливающих сумматоров 4 и 5, блок 9 алгебраического сложения, входы которого соединены с выходами перв ого и второго накапливающих сумматоров 4 и 5, третий и четвертый накапливающие сумматоры 10 и 11, первые входы которых соответственно подключены к вторым выходам датчиков 1 и 2 углов поворота начального и конечного звеньев, вторые входы - к первому и второму программным переключателям 6 и 7, а третьи входы - к блоку 9 алгебраического сложения.
Устройство работает следующим образом.
Предварительно в программные пере ключатели 6 и 7 вводят данные о конт ролируемой передаче 3. Для этого в программный переключатель 7 вводят величину углового расстояния между импульсами датчика 2 угла поворота конечного звена, а в программный переключатель 6 - угловое расстояние между импульсами датчика 1 угла пово рота начального звена, измененное в соответствии с передаточным числом контролируемой передачи 3. Затем по нажатии кнопки Пуск (не показана) блок 8 управления подает на третьи входы накапливающих сумматоров 4 и 5 сигнал, разрешающий их работу. При поступлении импульсов с выходов датчика 1 на входы накапливающих сумматоров 4 и 10 к их содержимому прибав
2313982
ляется величина, установленная в программном переключателе 6. При поступлении импульсов с датчика 2 к содержимому накапливающих сумматоров 5 5 и I1 прибавляется величина, установленная в программном переключателе 7. Подав сигналы с выходов накапливающих сз мматоров 4 и 10 на вычитающие, а с накапливающих сум- 0 маторов 5 и 11 на. суммирующие входы блока 9 алгебраического сложения , на его выходе получают информацию о функции кинематической погрешности. В случае, если каждый из дат- 5 чиков имеет по две считывающие головки, а погрешность датчика представлена только первой гармонической составляющей, содержимое накапливающих сумматоров 4 и 10 представляет собой 20 сумму оценок угла поворота датчика I и погрешности его изготовления. При сзгммированни этих величин в блоке 9 ползгчают удвоенное значение оценки угла поворота, а составляющая погрешности датчика 1, поступая с накапливающих сумматоров 4 и 10 в против офазе, подавляется.
Если кроме первой погрешность датчика содержит и другие гармонические составляющие, то количество сш1тываю- щих головок датчиков и накапливающих сумматоров соответственно увеличива- ется.
Использование изогбретения позволит повысить точность путем исключения из результата измерения погрешность датчиков углов поворота начального и конечного звеньев контролируемой зубчатой передачи.
25
30
35
40
Формула изобретения
Устройство для контроля кинематической погрешности зубчатых передач содержащее импульсные датчики углов поворота начального и конечного звеньев контролируемой передачи, первый и второй накапливающие сумматоры, соединенные первыми входами с первыми выходами указанных датчиков, два программных переключателя, подключенные к вторым входам первого и второго накапливающих сумматоров, блок управления, выход которого соединен с третьими входами накапливающих сумматоров, и блок алгебраического сложения, входы которого соединены с выхо- дами первого и второго накапливающих
сумматоров, отлич ающееся тем, что., с целью noBbnneHHH-to4HocTH, оно снабжено третьими и четвертым накапливающими сумматорами, первые входы которых соответственно подключены 5 гебраического сложения.
к вторым выходам датчиков углов поворота начального и конечного звеньев, вторые входы - к программным переключателям, а третьи входы - к блоку ал
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля кинематической погрешности зубчатых передач | 1983 |
|
SU1128109A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1983 |
|
SU1120158A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1180683A1 |
| Устройство для анализа кинематической погрешности зубчатых передач | 1984 |
|
SU1227945A1 |
| Устройство для измерения мертвого хода зубчатых передач | 1987 |
|
SU1428910A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1237902A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU1024699A1 |
| Способ контроля кинематической погрешности зубчатых передач | 1980 |
|
SU945637A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1983 |
|
SU1116306A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU962761A1 |
Изобретение относится к средствам .контроля зубчатых колес и позволяет повысить точность измерения путем исключения из резул тата контроля погрешностей датчиков начального и конечного звеньев контролируемой передачи. Это достигается тем, что в устройство для контроля кинематической погрешности зубчатых передач дополнительно введены два накапливающих сумматора, первые входы которых соответственно подключены к вторым выходам датчиков начального и конечного звеньев контролируемой передачи, вторые входы - к первому и второму программнь1М переключателям, а третьи входы - к блоку алгебраического сложения. Исключение погрешности датчиков производится сложением сигналов, поступающих с последних в противофа- зе. Количество дополнительных накапливающих сумматоров определяется номером гармоники погрешности датчиков,. которую нужно исключить. 1 ил. i (Л
Редактор А.Огар
Составитель Б.Афонский
Техред И.Попович Корректор В.Синицкая
Заказ 2556/47 Тираж 670Подписное
ВНШШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производственно-полигра4 1ческое предприятие, г. Ужгород, ул. Проектная, А
| Способ контроля кинематической погрешности зубчатых передач | 1980 |
|
SU945637A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
