К 13
у/ ///////////////ff/////// //////Ji/////// f/r-W // //////////////////
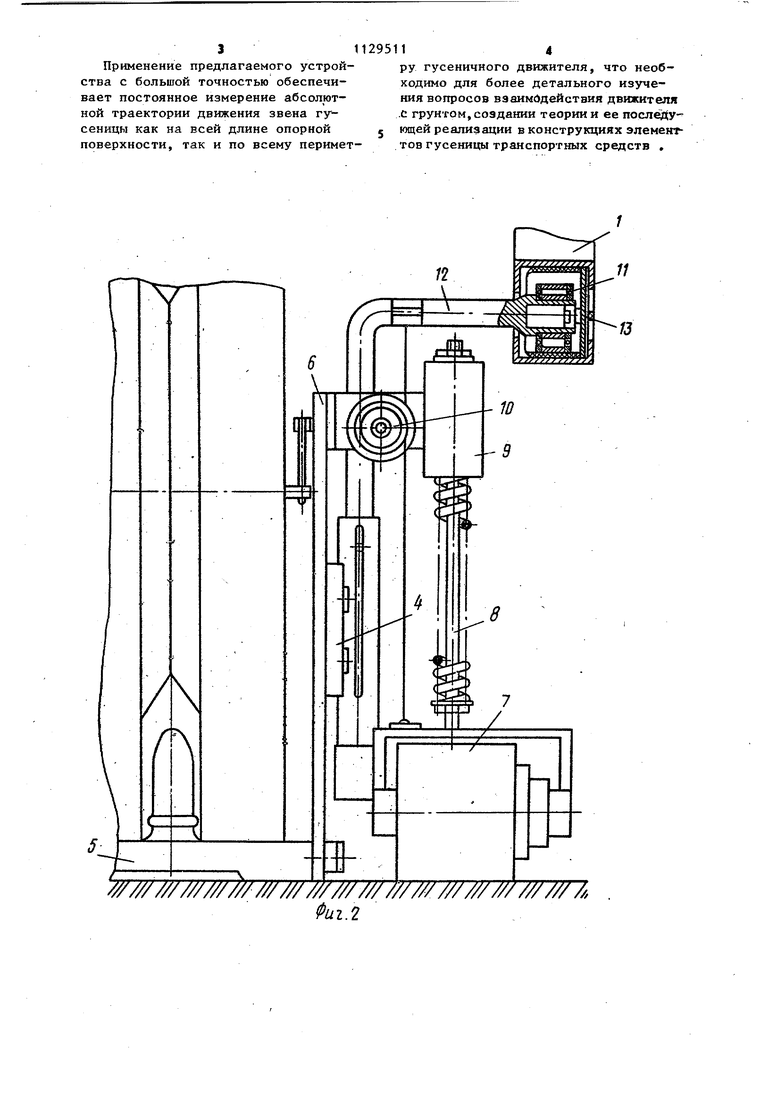
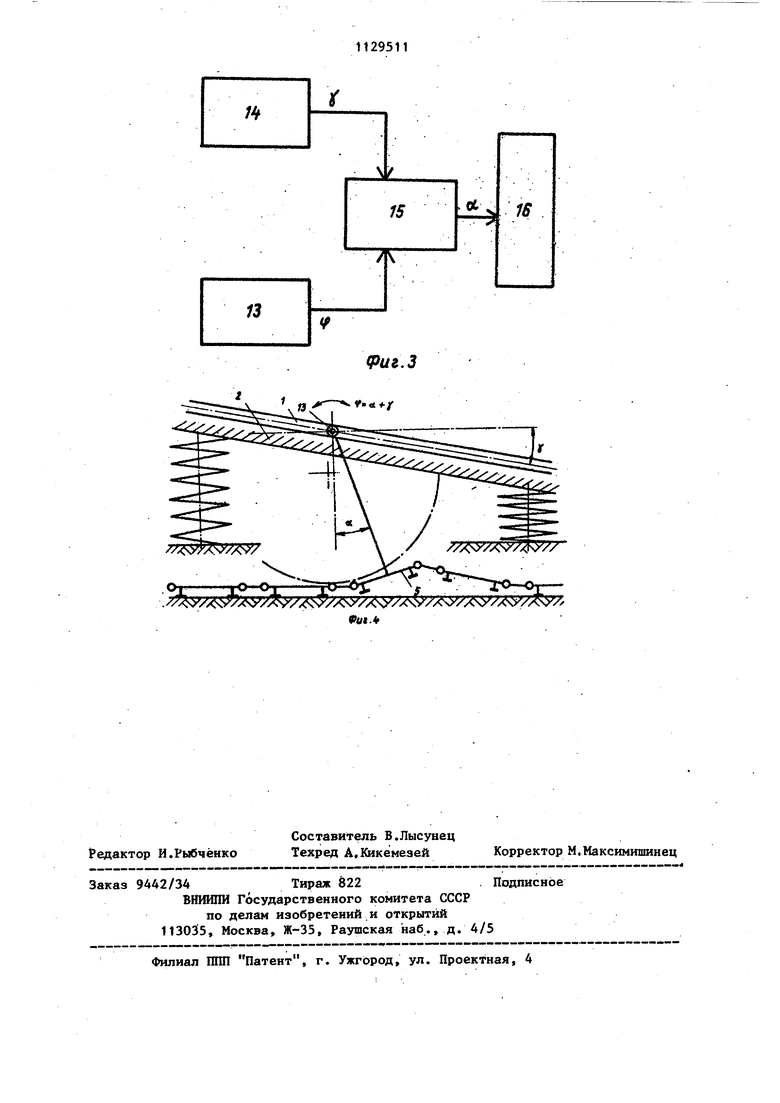
Фиг.г Изобретение относится к устройствам для испытания гусеничн.ьк тран спортных средств. По основному авт.св. № 696332 известно устройство для исследования кинематики гусеничной машины, содержащее гусеничный обвод с тензо метрическим звеном, охватывающий опорные катки, кронштейн с подпружи ненным роликом, закрепленным в рамк и датчики положения тензометрическо го звена, установленные на кронштей не, к которому прикреплено жестко тензометрическое звено, направляющие, прикрепленные к корпусу машины вдоль гусеничного обвода, и второй ролик, установленный в упомянутых направляющих, своей осью жестко закрепленный на кронштейне и снабженный датчиком перемещения, связанным с датчиком положения тензометрического звена lj . В таком устройстве из-за наличия неУ итываемых угловых продольных ко лебаний корпуса машины не достигается достаточной точности измерения углового положения тензометрического звена относительно горизонта. Цель изобретения - повышение точ ности измерений. Указанная цель достигается тем, что устройство для исследования кинематики гусеничной машины дополнительно снабжено гировертикалью, устаиовленной на корпусе машины, аналоговым сумматором и регистрирующим блоком, вход сумматора соедин с гировертикалью и датчиком положе ния тензометрического звена, а выход - с регистрирующим блоком. На фиг,1 представлено устройств для исследования кинематики гусенич ной машины, общий вид; на фиг.2 тензометрическое звено с датчиком положения, на фиг.З - схема связи грфовертикали с датчиком, сумматором и регистрирующим блокомi на фиг,4 - схема измерения п-оложения звена с применением гировертикали. Устройство содержит, направляющи 1, приз ;репленные к корпусу 2 машин с помощью кронштейнов 3. В направл щих установлен механизм 4 для заме ра кинематики движения тензометрического звена 5. Механизм содержит кронштейн 6, который крепится к те зометрическому звену 5, ролик 7 дл фиксации горизонтального смещения звена, стержень 8 с направляющей 9 и потенциометром 10 для регистрации вертикального смещения звена. В направляющих 1 установлен дополнительный ролик 11, своей осью 12 жестко связанньй с кронштейном 6. Ролик снабжен датчиком 13 в виде потенциометра для фиксации положения тензометрического звена в гусеничном обводе и его углового положения относительно корпуса машины. Дополнительно на корпусе машины установлены гировертикапь 14 (фиг.З) для замера угловых колебаний корпуса относительно горизонта, вычислитель, выполненный в виде аналогового алгебраического сумматора 15, и регистрир5пощий блок 16. Вход сумматора 15 соединен с гировертикалью 14 и датчиком 13, а выход - с регистрирующим блоком 16. При движении гусеничной машины тензометрическое звено, перемещаясь по периметру гусеничного обвода, входит в контакт с поверхностью -пути, при этом ролик 7, прижимаясь к грунту при скольжении звена 5, перемещается вместе с ним в горизонтальном направлении параллель- но колее, фиксируя абсолютное горизонтальное перемещениезвена 5 относительно грунта. . В условиях колееобразования при наличии вертикальной деформации грунта направляющая 9 со звеном пе ремещается относительно стерхсня 8, связанного с роликом 7, фиксируя при помощи потенциометра. 10 глубину погружения звена 5 относительно поверхности грунта. Датчик 13, встроенный в ролик 11, измеряет угловое положение звена относительно направляющих, жестко закрепленных на корпусе, т.е. алгебраическую сумму угловых колебаний корпуса и угловых перемещений звена С|) У (фиг.4). Гировертикаль 14 измеряет дифферент корпуса машины. В вычислителе указанные величины алгебраически суммируются, в результате чего определяется истинное значение углового положения oi звена относительно горизонта, а в совокупности с его горизонтальным и вертикальным перемещениями - абсолютная траектория движения звена 5, непрерьгоно фиксируемая р(ггистрирующим блоком 16.
Применение предлагаемого устройства с большой точностью обеспечивает постоянное измерение абсолютной траектории движения звена гусеницы как на всей длине опорной поверхности, так и по всему периметру гусеничного движителя, что необходимо для более детального изучения вопросов взаимодействия движителя .с грунтом, создании теории и ее послёЙУкяцей реализации в конструкциях элементтов гусеницы транспортных средств .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования кинематики гусеничной машины | 1977 |
|
SU696332A1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2008 |
|
RU2365916C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2013 |
|
RU2540432C1 |
| Устройство для съема электрических сигналов с тензометрического звена гусеницы транспортного средства | 1984 |
|
SU1227968A1 |
| Устройство для исследования взаимодействия гусеничного движителя с грунтом | 1973 |
|
SU548779A1 |
| Устройство для исследования кинематики гусеничной машины | 1986 |
|
SU1409877A1 |
| Устройство для контроля глубины | 1982 |
|
SU1038825A1 |
| Устройство для съема электрических сигналов с тензометрического звена гусеничного движителя транспортного средства | 1987 |
|
SU1474505A1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2003 |
|
RU2236673C1 |
| Устройство для измерения буксования гусеничной машины при повороте вокруг центра масс | 2020 |
|
RU2805547C2 |
УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ КИНЕМАТИКИ ГУСЕНИЧНОЙ МАШНЫ по« авт.св. № 696332, отличающееся тем, что, с целью повышения точности измерений, оно дополнительно, снабжено гировертикалью, установленной на корпусе машинЕД, аналоговым сумматором и регистрирующим блоком, вход сумматора соединен с гировертикалью и датчиком положения тензометрического звена, а ВЕДХОД - с регистрирующим блоком.
///////////////////////////////////////////////// /А
Фиг.2
-fi-- jЛтлГТ-Л- АТГлг -/1-. - TLтТчТ- . //x /xSy Usy/J /xf
9u.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для исследования кинематики гусеничной машины | 1977 |
|
SU696332A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
