Устройства для гидравлического дистанционного управления сдатчиком выг ОЛ11енпыл1 в виде насоса, нагнетающего р абочую жидкость, .-ртора воспргпшмается иодвижным, нагруженньш пружиной элементом приемиик.а известны. Однако они имеют существенные недостатки-такие как сложность конструкции, больщие нотери на трение в уплотнениях трудность в обеспечении герметичности в подвижных соединениях. В ре- -тьтзте это.го происходит утечка рабочей жидкости, приводящая к папушенпю сиихронност; между штока датчика и ходом штокп
ИПИ1 - 11 ка 11 др.
15 описыияемом устройство зтп недостатки усграиены. Суииюсть н- об- етечия заключается в том, что в описываемом устройстве, с целью упрощения конструкции, увелнчепил надежности его работы и предотвращения утечки рабочей жидкости, в нем применены датчик и приемник мембранного типа.
тс. сообщения мембране датчика перемещений она соединена со H TOKO-v- связанным с рукояткой управления посредством зубчатой рейки, чах-Д-гейс-я в зацеплении с зубчатым сектором, размещенным на оси р,,.;;р,;. , vг-:-aвлeиия. Такое выполнение устройства обеспечивает полHv.o - pMeTHiHGCTb, гарантирует от нарущенмй синхронности ходом щтока датчика и ходом щтока приемника и облегчает его эксплуаташпо и ремонт.
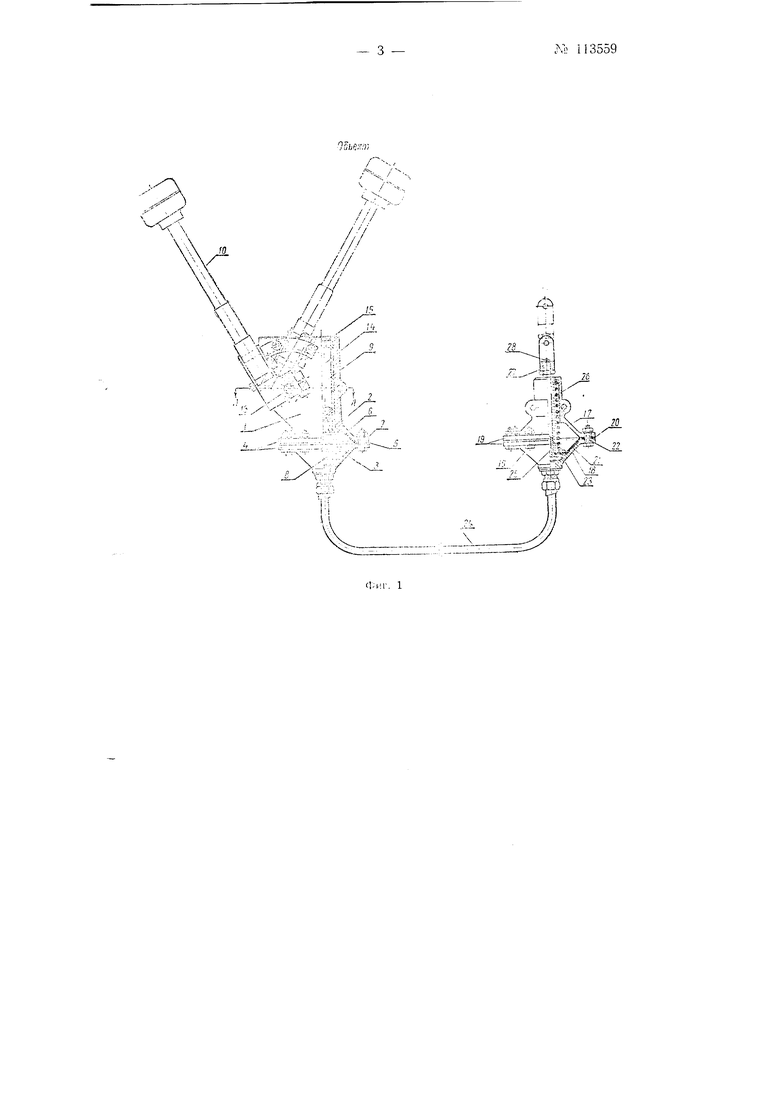
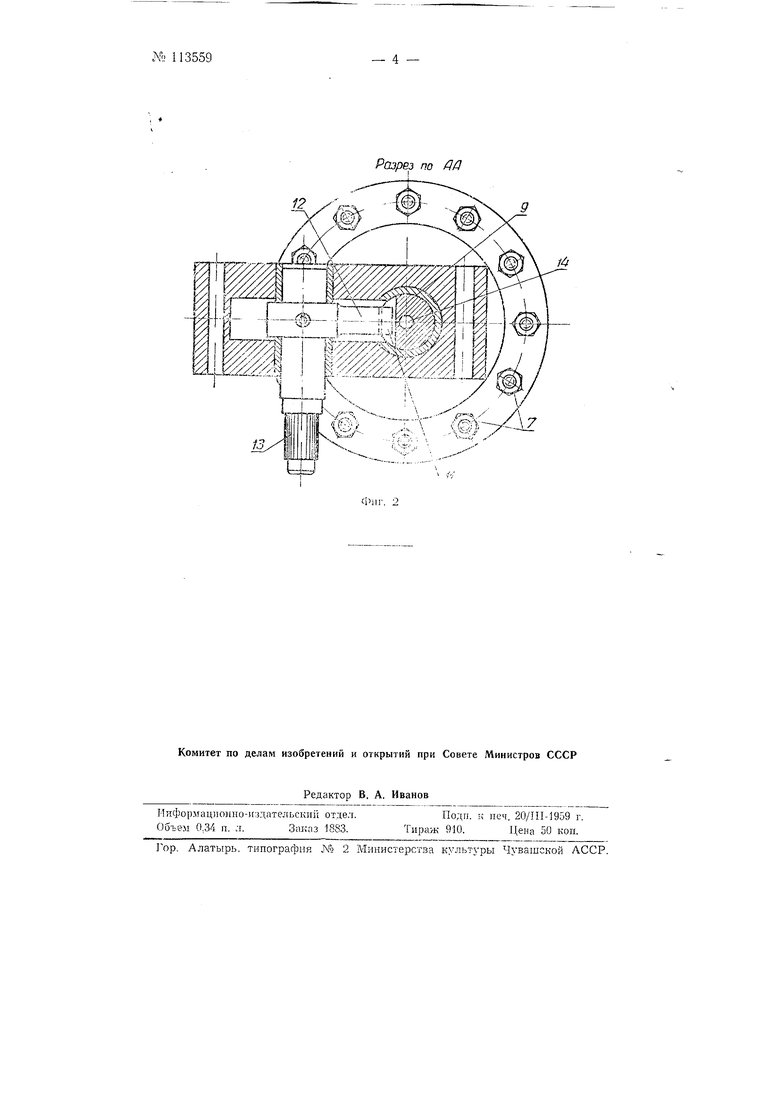
На фиг. 1 нзображен общий вид устройства с частичным разрезом. вид сбоку; на фиг. 2-разрез по А А, па фиг. 1.,
Kopnvc датчика 1 выполнен разъемным из двух чао ей, крыЩ.и ц основаиия 5, между фланцами 4 которых р.азмещен фланец 5 фигурной мембраны 6, фланцы плотно скреплены бол.тами /. Мембрана 6 своей поверхностью расположена в крыщке 2 датчика / и об.Y 113559- 2 -
разует с основанием 3 посопеднего герметическую ка.еру 5, иНСлпяемую ;1а«бочей жидкостью. Мембрана О соед:п;с;-: : со urroKOi.i 9, с;.;:за1;,;:л:л с рукояткой 10 управления Датчико: ; / посредстве ; зубчаток pofixii il, находящейся в зацегктении с зубчатым сектором 12, разл1еален;-;ыг., ::а оси 13 рукоятки 10. Што) 9 имеет CKj303Hoe продо.шиос:; отьсрст ;с 7-, через которое заливаете ; рабочая смесь в камеру S датчкка /. В ко;;;;; отверстия 14 завернута пробка 15.
Корпус приег-,ника 16 так выполнен разъс;лным из дву}; крышки 17 к основания 18, между флаица; и 19 которы; |:-азь;с1ден флаыец 20 г.1ембр.аиы 21; последние плотно скреплены болтаА:и 22. Мегибраиа 21 расположена своей выпу1 лой поБер;а;остью в основапни 18 приемпика 16 и образует с гер;11етическу о камеру 23, соединенную 1;о:;:едстЕо.м Трубопровода 24 с камерой 8 датчика 1.. образу ; единую ;чамс у запол1 еиную рабочей жидкостью.
Мембрана 21 соед 1ие;1а со штоке;-: 2S, 1оловка 26 которо;о связап: с привод;1ьг; агрегатом (на фиг. ;;е показано). Ме,;бра; а 21 и :;г-о;; 2 иагружеиы пружиной 26. Шток 23 и;,еет сквозное иосдол;з::;;с )стне 27, через которое стравливается из ед;-1; ой кг мер;,; ---р:У:ства. В нару:кном кочце отверстия .27 завернута пробка 28.
При повороте рукоятки iG унравле;1ия датчиком J вправо И1ток .9 опускается Еп;13, ;а ;:нмает па мембра1;у 6, у;.1е; ВИаст сбъем камер; 5 датчика / и в;1 тес;; ;ет из нее рабочую }к;1д; оств ;10 трубопроводу 24 в камеру 23 приемника 16. Под да зле;п ем ;)абочей жил,кости мо;м6р; иа ./ приемгп ка /6подпимаетс;; вверх ;; через coe;i:;;;e;;n ni е :ci
При HOiiOpoTe рукоятки 10 уиравлепип датчиком / влезо П1ток 9 с сосдинеппой к нему мембра ;ом 6 поднимается вверх.
В гсагтсре 8 датчика / создается 1-а;-;уум, под возде ст;;;;е;.; которого рабочая /К1;д; оств перетекает из :;а ;ерь; 23 пр;;см; и:;а 16 в г;аме|) 8 датчпка 1. Под действием пружнтл 26 меМбра а 21 со иг-о;--;см 25 i;epeмещается вниз, г;ередавая пепемспхепие привод; ому arpeiaiy в обрат:1ую сторону.
Для 3anpai : ii уетройетва рабочей жидкоствю jir)nii;;;4i;Ba:oT ipo6Ki; 15 и 2S. После заправки пробки 15 и 28 завертывают обратно.
П ) е д м е т и з о б р е т е н и я
1. стрсйство для гид }азлического диета;;п,ио;п;ого у; рав;;1, с датчиков;, выпслиепи; ;-; в в;;де иасоса, пагнетаемая котормр.; рабочая жидкость воспрпппмается исдв;1/;;нв М иагружениьгм прунлчюй элеме;том пр;1емипка, о т л и ч а ю п;, е е с я тем, что, с цель;о предотЕраи;,еН|Г; утечки рабочей жидкост -; и ирощен11Я ко; етрук;дин, в пел; приме; е;пл датчик и npiie;viHHK мембраппого типа.
2.ФорГ.я вьшолиепия устройст;;а по п. 1, отличающаяся те),, что, с целью сообщен;-; мембр ане датчика перемеи1еп;;й, o;;,;i сосд;;;;е;1а с зубча,той рейкой, находящейся в запеплепиис зубчат;.;А; еекторо; ;ia оси рукоятки управления.
4
12
Разрез no ДД
7
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической выгрузки мыльных плит из мыльно-холодильных прессов | 1952 |
|
SU96526A1 |
| ПРЕСС ДЛЯ БРИКЕТИРОВАНИЯ ТОРФА И ПОДОБНОГО МАТЕРИАЛА | 1966 |
|
SU185741A1 |
| УСТРОЙСТВО для НИЖНЕГО ГЕРМЕТИЗИРОВАННОгЬ f^O'^'CC^iO'JHTT" НАЛИВА ЦИСТЕРН|''-ЛГ.'.'...I ••;-• *'--1-'.!:;п,:: S.^i! | 1971 |
|
SU291816A1 |
| Закрытый мерник для жидкостей с поршнем | 1929 |
|
SU18956A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| Двигатель внутреннего горения | 1932 |
|
SU40093A1 |
| Устройство для определения объемного содержания нерастворенного газа в исследуемой жидкости | 1985 |
|
SU1355911A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕМНОГО СОДЕРЖАНИЯ НЕРАСТВОРЕННОГО ГАЗА В ИССЛЕДУЕМОЙ ЖИДКОСТИ | 1991 |
|
RU2024840C1 |
| Гладильный пресс | 1955 |
|
SU108547A1 |
| Устройство для сборки фотоэлектрических приборов типа видиконов | 1977 |
|
SU661638A1 |