1 1 Изобретение относится к сельскохозяйственному машиностроению и может быть использовано для копирования рельефа поля рабочими органами машины, например, выкапывающими органами корнеуборочной машины. Известно устройство для автоматического копирования рельефа почвы, содержащее источник гидравлического питания, гидрораспределители ручного и автоматического управления, датчики, гидроцилиндры, гидрозамки и обратные клапаны lj . Недостатком Известного устройства применительно к многорядным корнеубо рочным машинам, оборудованным дисковыми копачами, является низкая точность копирования рельефа рабочими органами и сложность устройства. Это обусловлено тем, что при взаимодействии дисковых копачей с почвой возникает вертикальная составляющая силы, направленная вверх и зависящая от физико-механических свойств почвы, скорости движения машины и глубины хода копачей. При этом на плотных почвах вертикальная составляющая силы достигает значительной величины, и заглубление рабочих органов под действием веса рамы копачей становится затруднительным или нево можным. Применение известного устройства в котором опускание (заглубление) рабочих органов в режиме автоматиче кого копирования происходит только под действием их веса, для корнеуборочной машины, оборудованной дис ковыми копачами, отрицательно сказы вается на качественных характеристи ках ее работы, а сложность устройст ва обусловлена применением в нем де лителей потока. Наиболее близким по технической сущности к предпагаемому является устройство для автоматического поддержания заданной глубины хода рабочих органов корнеютубнеуборочной машины, содержащее источник гидравлического питания, подключенный через гидрораспределитедь ручного управления к двум контурам автоматического регулирования, каждьй из которых содержит датчик, кинематиче ки соединенный с золотником гидрораспределитепя автоматического упрааления, и гидроцилиндр двусторон него действия, при этом одноименные 62 полости гидроцилиндра ка кдого контура гидравлически связаны с управляющими каналами своего падрораспределителя автоматического управления, а посредством обратных клапанов - с управляющими каналами гидрораспределителя ручного управления, один из которых также подсоединен к входному каналу гидрораспределителя автоматического управления одного контура автоматического регулирования, а другой - к выходному каналу гидро- распределителя другого контура 27. Однако это устройство недостаточно надежно в работе. При определенных позициях золотников гидрораспределителей автоматического управления рабочие органы невозможно перевести в транспортное положение при помощи реверса потока жидкости, например, когда непосредственно перед переводом рабочж органов из рабочего положения в транспортное золотники обоих гидрораспределителей автоматического управления устанавливаются в положение Подъем или Опускание. Цель изобретения - расширение технологических возможностей устройства путем обеспечения возможности перевода рабочих органов из рабочего положения в транспортное. Поставленная цель достигается тем, что в устройстве для автоматического поддержания заданной глубины хода рабочих органов корнеклубнеуборочной машины, содержащем .источник гидравлического питания, под1слюченный через гидрораспределитель ручного управления к двум контурам автоматического регулирования, каждый из которых содержит датчик, кинематически соединенный с золотником гидрораспределителя автоматического управления, и гидроцилиндр двустороннего действия, при этом одноименные полости гидроцилиндра каждого контура гидравлически связаны с управляю1151ми каналами своего гидрораспределителя автоматического управления, а посредством обратных клапанов - с управляющими каналами гидрораспределителя ручного управления, один из которых также, подсоединен к входному калалу гидрораспределителя автоматического управления одного контура автоматического регулирования, а другой - к выходному каналу гидрораспределителя другого контура,одноименные полости гидроциливдров каждого контура подсоединены к управляющим каналам своего гидрораспределителя автоматического управления посредством гидрозамка, а выходной канал гидрораспределитепя автоматического управ ления одного контура гидравлически соединен с входным каналом гидрораспределителя автоматического управления другого контура. На чертеже изображена гидравлическая .схема устройства для автомати ческого поддержания заданной глубины хода рабочих, органов корнеклубнеуборочной машины. Устройство для автоматического по держания заданной глубины хода рабочих органов корнеклубнеуборочной маши ны содержит источник 1 гидрачличес- кого питания, подключенный через ги рораспределитель 2 ручного управлен к двум контурам автоматического регулирования, каждый из которых со держит датчики 3 и 4, кинематически соединенные с золотниками гидрораспределителей 5 и 6 автоматическо го управления, и гидроцилиндры 7 и 8 двустороннего действия, при этом одноименные полости гидроцилиндров 7 и 8 каждого контура связаны с управляющимИ каналами своих гидрорас- пределителей 5 и 6 автоматического управления, а посредством обратных клапанов 9-12 - с управляющими кана лами 13 и 14 гидрораспределителя 2 ручного управления, один из которых 13 подсоединен к входному каналу гидрораспределителя 5 автомаТич ско- го управления одного контура автомат ческого регулирования, а другой 14 через обратный клапан 15 к выходному каналу гидрораспределитепя 6 другого контура. Одноименные полости гидроцилиндров 7 и 8 каждого контура подсоединены к управляющим каналам своих гидрораспределителей 5 и 6 автоматического управления посредством гидрозамков 16 и 17, а выходной канал гидрораспределителя 5 одного контура гидравлически соединен с входным каналом гидрораспределите- ля 6 автоматического управления другого контура. Устройство для автоматического поддержания заданной глубины хода рабочих органов корнеклубнеуборочной машины работает следующим образом. 1 56 В режиме автоматического регулирования рабочая жидкость под давлением от источника 1 гидравлического питания через гидрораспределитель 2 поступает в управляющий канал 13, а канал 14 соединяется со сливом. При нахождении рабочих органов на заданной глубине жидкость из канала 13 через гидрораспределитель 5 и 6 . и обратный клапан 15 поступает в канал 14 и далее на слив. Гидрозамками 16 и 17 и обратными клапанами 11 и 12 полости гидроцилиндров 7 и 8 заперты, и рабочие органы зафиксированы в заданном положении. При отклонении от заданной глубины хода, например, при заглублении рабочего органа с гидфораспределителем 5 датчик 3 через кинематическую Ц смещает золотник падрораспределителя 5 влево, и жидкость поД давлением из канала 13 через гидрораспределитель 5 и гццрозамок 16 поступает в штоковую полость гидро- цилиндра 7, а жидкость из противопо.ложной полости через гидрозамок 16 и гидрораспределитель 5 поступает к гидрораспределителю 6. Гидроцилиндр 7 поднимает рабочий орган до тех пор, пока золотник гидрораспределителя 5 посредством датчика 3 не установится в нейтральное положение, т.е. пока рабочий орган не поднимается до заданной глубины хода. При необходимости заглубления (опуска- i ния) рабочего органа золотник гидро- распределителя 5 смещается вправо, жидкость под давлением поступает- в бесштоковую полость гидроцилиндра 7, а вытесненная из штоковой полости жидкость через гидрозамок 16 и гидрорас- пределитель 5 поступает к гидрорас- пределителю 6. При этом происходит принудительное заглубление рабочего органа до заданной глубины. Таким образом, независимо от положения золотника гидрораспределителя 5 рабочая жидкость поступает к гидрораспределителю 6. В зависимости от положения золотника гидрораспределителя 6, определяемого, в свою очередь, смещением соответствующего датчика 4, рабочая жидкость при нейтральном положении, золотника поступает через обратный клапан 15 в канал 14 и на слив, а при смещенном вправо или влево - соответственно в бесштоковую или штоковую полость гидроцилиндра 8.
Вытесненная из противопопсясной полости жидкость через гидрозамок 17, гидрораспределитель 6 и обратный клапан 15 поступает в канал 14 и на слив, а рабочий орган смещается в вертикальной плоскости до установки в заданном положении. Следовательно перемещение каждого рабочего органа происходит принудительно и независимо друг от друга, а скорость перемев ния постоянна и определяется параметрами источника гидропитания и гидрофшиндров.
Для перевода рабочих органов в транспортное положение при помощи гирораспределителя 2 жидкость под давлением Подается в канал 14, а канал 13 соеданяётся со сливом. При этом обратный клапан 15 блокирует поступление жвдкости к гидрораспределителям 6 и 5, а через обратные клапаны 11 и 12 жидкЬсть под давлением поступает в што1совые полости гидроцилиндров 7 и 8.
Вытесненная из бесштоковых полостей жидкость через обратные клапаны
9 и 10 поступает в канал 13 и далее на слив. Происходит подъем рабочих органов в транспортное положение. Гидрозамки 16 и 17 блокируют поступление жидкости к гидрораспределителям 5 и 6.
Для перевода рабочих органов из транспортного в рабочее положение при помощи гидрораспределителя 2 жидкость под давлением подается в канал 13, а канал 14 соединяется со сливом. Так как от датчиков 3 и 4 на гидрораспределитеЛи 5 и 6 подается сигнал Опускание, происходит опускание рабочих органов до установки их на заданной глубине хода. Устройство готово к работе в режиме автоматического копирования рельефа.
Применение предлагаемого устрой ства для автоматического поддержания заданной глубины хода рабочих органов ;расширяет технологические возможности устройства путем обеспечения перевода рабочих органов из рабочего положения в транспортное независимо от исходных положений золотников гид-. рораспределителей автоматического управления.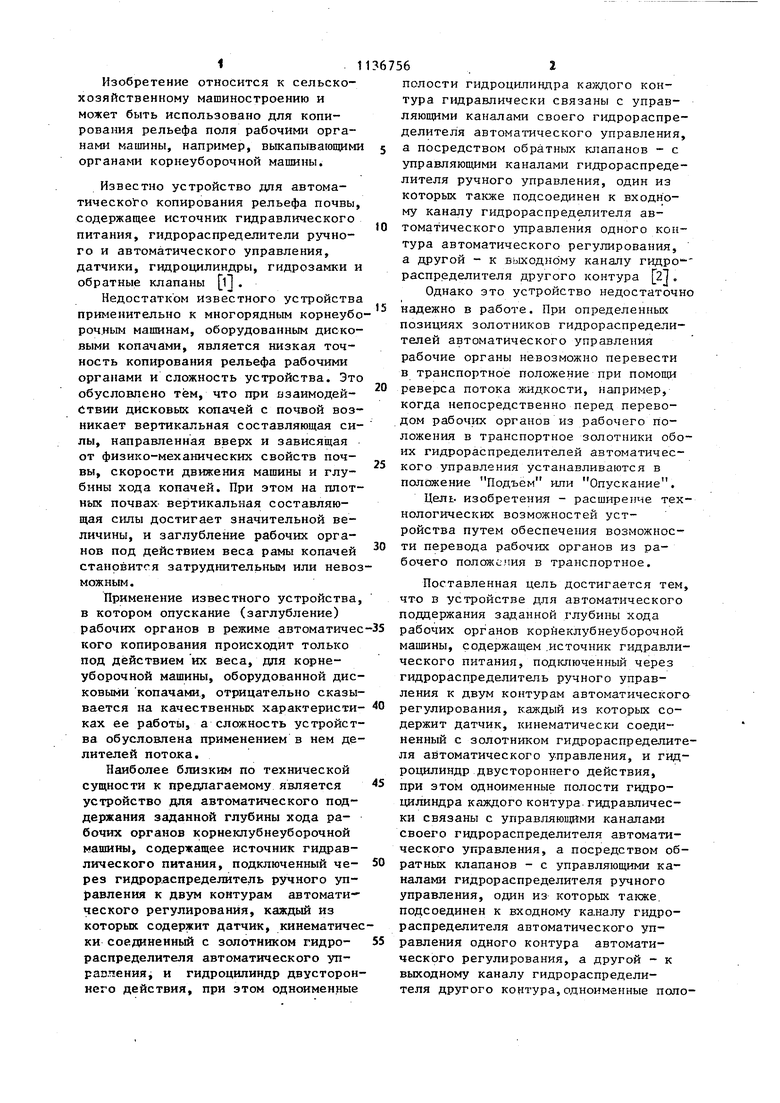
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического копирования рельефа почвы рабочими органами | 1981 |
|
SU1009300A1 |
| Устройство для стабилизации глубины хода подкапывающих органов корнеклубнеуборочной машины | 1988 |
|
SU1563608A1 |
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
| КОМБАЙН ПРОХОДЧЕСКО-ОЧИСТНОЙ | 2018 |
|
RU2688711C1 |
| Устройство для автоматическогопОддЕРжАНия зАдАННОй глубиНыХОдА РАбОчиХ ОРгАНОВ СЕльСКО-зяйСТВЕННОй МАшиНы | 1979 |
|
SU808022A1 |
| Гидросистема для установки рабочего органа дорожной машины | 1979 |
|
SU931893A1 |
| Гидросистема свеклоуборочного комбайна | 1979 |
|
SU738531A1 |
| Объемный гидропривод рулевого управления транспортного средства | 1984 |
|
SU1180291A1 |
| Гидравлическая система комбайна | 1989 |
|
SU1667692A2 |
| Гидравлическая система комбайна | 1988 |
|
SU1561879A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСKOFO ПОДДЕРЖАНИЯ ЗАДАННОЙ ГЛУБИНЫ ХОДА РАБОЧИХ ОРГАНОВ КОРНЕКЛУБЙЕУВО- РОЧНОЙ МАШИНЫ, содержащее источник гидравлического питания, подключенный через гвдрораспределитель ручного управления к двум контурам автоматического регулирования, каждьгй из которых содержит датчик, кинематически соединенный с золотником гидрораспределителя автоматического управления, и гидроцилиндр двустороннего действия, при этом одноименные полости гидррцилиндра каждого контура гидравлически связаны с управляющими каналами своего гидрораспределителя автоматического управления, а посредством обратных клапанов - с управляющими каналами гчдрораспределителя ручного управления, один кз которых также подсоединен к входному каналу гидрорасйределителя автоматического управления одного контура автоматического регулирования, а другой - к выходному каналу гидрораспределителя другого контура, отличающееся тем, что с цея1 расширения технопогкгаеских возможностей устройства путем сбеспечеяня возм(з(жности перевода рабочих органов из рабочего положения в транспортное, одясяшеиные полости гидроципиндров каящого контура подсоединены к управляющим каналам своего гндрораспредепителя автоматического управления посредством гидрозамка, а выходной канал гидрораспределителя автоматического управления одного контура гидравлически соединен с входным каналом гидрораспределнтеля автоматического управления другого контура.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического копирования рельефа почвы | 1973 |
|
SU682176A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Облицовка комнатных печей | 1918 |
|
SU100A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
