Изобретение относится к грузозах ватным устройствам.
Известен механизм управления за .хватными органами грузозахватных устройств содержащий корпус с выпол- s ненным в нем окном и закрепленной в корпусе звездочкой, и размещенный в корпусе ползун с упором, взаимодейст вующим со звездочкой ij.
Однако это устройство недостаточ- Ю но надежно в работе из-за ненадежности взаимодействия звездочки и упора.
Наиболее близким к изобретению по технической сущности является мехаНизм управления захватными органами is грузозахватного устройства, содержа™. щий установленные на корпусе грузозахватного устройства с возможностью вертикального перемеЕ1ения приводной элемент, соединенный с грузоподъе 20 ным механизмом, и фиксирующие рыча™ ги, установленные с врзможностыо взаимодействия верхними плечами с приводным элементом и связанные нижними плечами с пружинами 2 . 25
Однако в этом устройстве производится фиксация уолъко элементов само го механизма без воздействия на захватные органы, что снижает надежность работы, 30
Цель изобретения - повышение на дежности работы.:
Поставленная цель достигается тем, чта в механизме управления захватными органами грузозахватного устрой- 35 ства, содержащем установленные на корпусе грузозахватного устройства с Возможностью вертикального перемещения приводной элемент, соединен-. ный с грузоподъемньм механизмом, и 40 фиксирующие рычаги, установленные с возможностью взаимодействия верхними плечами с приводным элементом и связанные нижними -плечами с пружинами, приводной элемент представляет 45 собой палец, а механизм снабжен шарнирно установлешшми на корпусе грузозахватного устройства передаточны ми двуплечими рычагами к нижним плечам которых прикреплены пружины 50 фиксирующих рычагов, нижние концы которых соединены тягой, челноком., шарнирно прикрепленным к верхним плечам передаточных рычагов и снаб . женным закрепленньа-1И; по его концам 55 запорными элементами для захватных органов, и ограничителгм перемещения челнока, выполненньии в виде надетой
на палец пластины, имеющей центральный выступ и боковые крюки для вза-, имодействия -соответственно с челноком и фиксирующими рычагами.
На чертеже изображен предлагаемый механизм, общий вид.
. Механизм управления содержит установленный в пазу 1 корпуса 2 грузозахватного устройства приводной эле. мент, вьтолненный в виде пальца 3. На пальце 3 закреплен якорь А с центральным выступом 5 и боковыми крюками 6. По обе стороны от якоря на корпусе 2 шарнирно на осях 7 закреплены фиксирующие рычаги 8 с пальцами 9, йижние концы которых шарпирно соединены тягой 10. На корпусе 2 шарннрно посредством осей 11 установлены пере даточные двуплечие рычаги 12, нижние концы которых посредством пружин 13 и 14 соединены с тягой 10.
На. верхних концах двуплечих рыча
гов 12 посредством пальцев 15 установлен Челнок 16, в средней части которого закреплены упоры 17, а на концах - запорные элементы 18 для взаимодействия с элементами 19 захватных органов.
Устройство работает следующим образом.
При Опускании грузозахватного устройства на захватываемьш груз палец 3 опускается в пазу 1, при этом левый крюк 6 якоря 4 выкодит из зацепления с пальцем 9 левого рычага 8 а пружина 13 перемещает тягу 10 вправо. При этом правый рычаг 8 упирается в корпус якоря 4.
При подъеме грузозахватного устройства палец 3 поднимается по пазу 1 , а правый крюк 6 якоря 4 входит в зацепление с пальцем 9 правого рычага 8, и под действием веса всего устройства ккаръ 4 поворачивается по часовой стрелке, перемещая выступом 5, упирающимся в упор 17, вправо 4ejT иок 16. В результате запорные элементы 18 входят во взаимодействие с . элементами 19 захватных органов, фиксируя их в закрытом положении. Одноврег енно поворачиваются по часовой стрелке рычаги 12, сжимая пружи-. ну 13 и растягивая пружину 14.
При опускании устройства с грузом палец 3 опускается, правы.й крюк 6 якоря 4 выходит из зацепления с паль311370554
цем 9,и под действием пружины 14 чел- Изобретение обеспечивает повышенок 16 перемещается влево, выводя ние надежности работы грузозахватных запорные элементы 18 из зацеп- устройств путем фиксации в рабочем ления с элементами 19 захватных положении непосредственно элементов органов.5 захватных органов.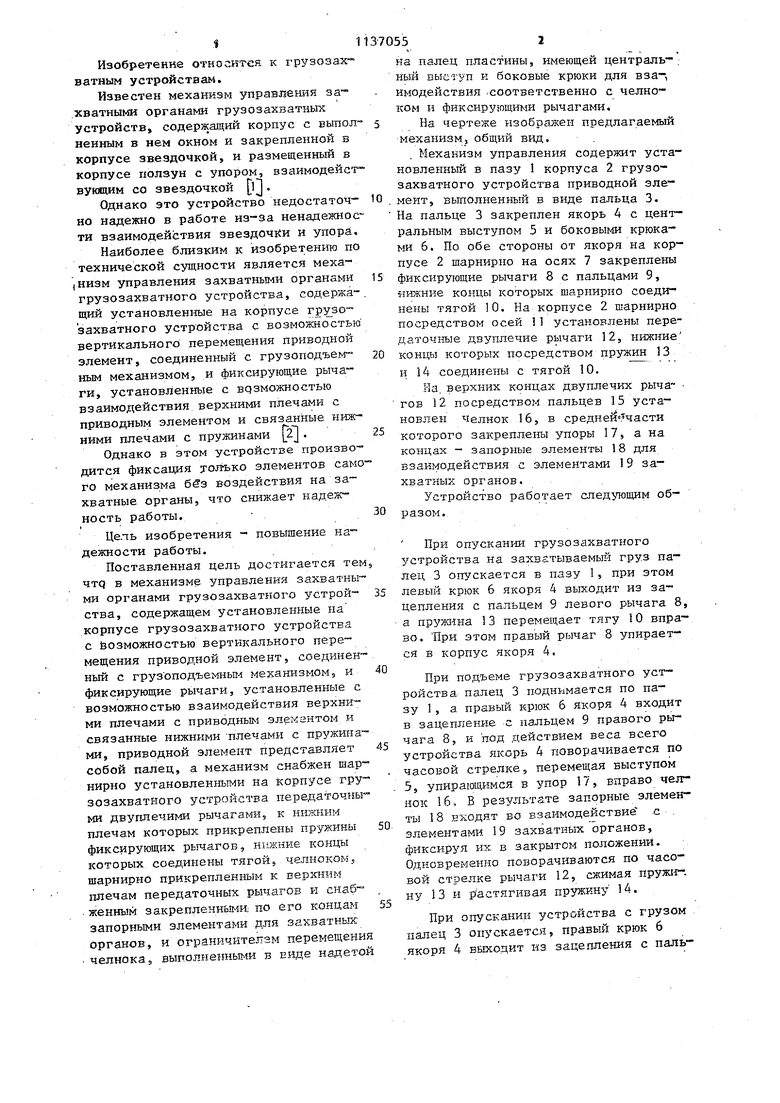
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
SU1837563A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватное устройство | 1980 |
|
SU912623A1 |
| Автоматический захват | 1981 |
|
SU1009963A1 |
| Грузозахватное устройство | 1988 |
|
SU1519995A1 |
| Механизм для фиксации рабочих органов захватного устройства | 1983 |
|
SU1191414A1 |
| Захватное устройство для изделий с центральным отверстием | 1984 |
|
SU1294751A1 |
| Захватное устройство для изделий с центральным отверстием | 1988 |
|
SU1557059A2 |
| Грузозахватное устройство | 1990 |
|
SU1710484A1 |
МЕХАНИЗМ УПРАВЛЕНИЯ ЗАХВАТ,НЫШ ОРГАНАМИ ГРУЗОЗАХВАТНОГО УСТРОЙСТВА, содержащий установленные на корпусе грузозахватного устройства с возможностью вертикального перемещения приводной элемент, соединенный с грузоподъемным механизмом, и фиксирующие рычаги, установленные с возможностью взаимодействия верхними плечами с приводным элементом и свя- занные нижними плечами с пружинами, отличающийся тем, что, с целью повышекмя надежности работы, приводной элемент представляет собой палец, а механизм снабжен шарнирно установленными на корпусе грузозахватного устройства передаточными двуплечими рычагами, к нижним плечам которых прикреплены пружины фиксирующих рычагов, нижние концы которых .соединены тягой, челноком, шарнирно прикрепленным к верхним плечам передаточных рычагов и снабйсенным закрепленными по его концам запорными элементами для захватных органов, и ограничителеь перемещения челнока, выполненным в виде надетой (Л на палец пластины, имеющей центральный выступ и боковые крюки для взаимодействия соответственно с челноком и фиксирующими рычагами.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм управления грузозахватным устройством | 1972 |
|
SU459413A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автоматическое захватное устройство | 1977 |
|
SU747801A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
