(54) ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм фиксации элементов грузозахватного устройства | 1981 |
|
SU1006355A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Автоматический захват | 1981 |
|
SU1009963A1 |
| Автоматический захват | 1983 |
|
SU1174366A1 |
| Грузозахватное устройство | 1982 |
|
SU1098896A1 |
| Автоматический захват | 1981 |
|
SU1020350A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Грузозахватное устройство | 1980 |
|
SU895892A1 |
| Захватное устройство для облицовочных плит | 1976 |
|
SU600068A1 |
1
Изобретение относится к грузоподъемным механизмам, в частности к грузозахватным устройствам для транспортировки штучных грузов, например труб, и может быть использовано при погрузочно-разгрузочных работах, а также при монтаже трубопроводов.
Известно грузозахватное устройство, содержащее траверсу с шарнирно закрепленными на ней кинематически связанными между собой захватными лапами и механизм фиксации захватных лап в раскрытом положении, содержащий подпружиненную поворотную защелку, взаимодействующую с пальцем, закрепленным на одной из захватных лап 1.
Однако известное устройство недостаточно удобно в эксплуатации за счет необходимости полного раскрытия захватных лап для обеспечения расфиксации подпружиненной поворотной защелки.
Цель изобретения - повыщение удобства в эксплуатации.
Цель достигается тем, что защелка закреплена на траверсе и выполнена в виде двуплечего рычага, свободное плечо которого снабжено шарнирно закрепленным на
его конце управляющим щтоком, подвижно установленным в направляющих, также шарнирно связанных с двуплечим рычагом посредством подпружиненной жесткой тяги, причем захватные лапы подпружинены относительно траверсы.
Такое выполнение устройства повышает удобство его в эксплуатации, так как рас- фиксация поворотной защелки происходит раньше полного раскрытия захватных лап.
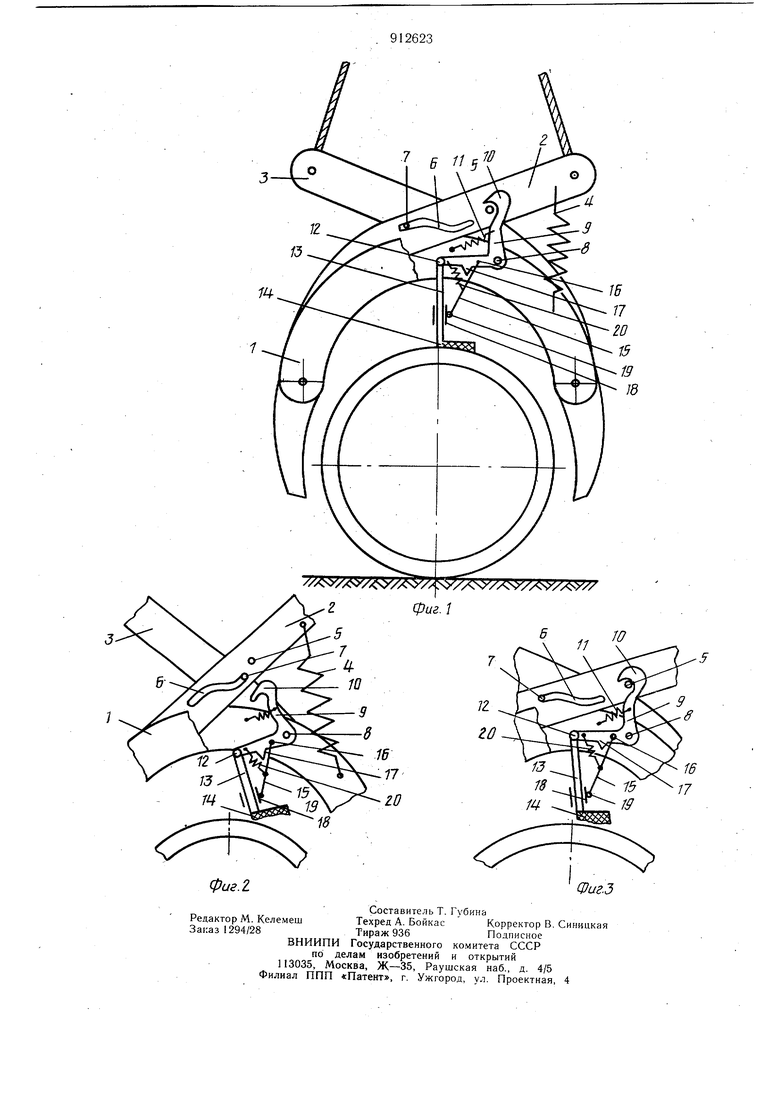
На фиг. 1 изображено грузозахватное
10 устройство, общий вид, момент захвата груза; на фиг. 2 - механизм фиксации, момент захвата груза; на фиг. 3 - то же, момент расстроповки устройства-.
Грузозахватное устройство включаег 15 траверсу, выполненную в виде скобы 1 с шарнирно прикрепленными захватными лапами 2 и 3. Захватная лапа 2 связана с траверсой 1 пружиной 4 и имеет фиксирующий палец 5. В средней части захватной 2Q лапы 2 выполнен фигурный паз 6, в котором перемещается направляющий палец 7 захватной лапы 3.
На траверсе 1 с помощью шарнира 8 установлен двуплечий рычаг 9, одно плечо которого выполнено в виде защелки 10, связанный с траверсой 1 пружиной П. Другое плечо двуплечего рычага 9 шарниром 12, соединено с управляющим штоком 13, оканчивающимся башмаком 14, а в средней части имеет жесткую тягу 15, установленную на шарнире -16, и упор 17, ограничивающий перемещение тяги 15. Кроме того, управляющий шток 13 установлен в направляющих 18 и соединен щарниром 19 с тягой 15, связанной с плечом двуплечего рычага 9 пружиной 20. Устройство работает следующим образом. Грузозахватное устройство, навешенное на крюк грузоподъемной машины посредством канатов, находится в разгруженном состоянии, т. е. захватные лапы 2 и 3 раздвинуты, при этом пружина 4 сжата/ а защелка 10 двуплечего рычага 9 находится в зацеплении с фиксирующим пальцем 5, причем управляющий шток 13 находится в вертикальном положении. При опускании устройства на груз управляющий шток 13 башмаком 14, упираясь в поверхность груза, начинает перемещаться вверх и воздействует на двуплечий рычаг 9, поворачивая его на щарнире 8. Устройство полностью опускается на груз, а защелка 10 двуплечего рычага 9 при этом освобождает фиксирующий палец 5. При подъеме устройства .захватные лапы 2 и 3, не встречая препятствия, проворачиваются относительно траверсы 1 и зажимают груз,- причем .между траверсой 1 и поверхностью груза образуется зазор, позволяющий двуплечему рычагу 9 под действием пружины 11, провернуться влево на шарнире 8. Управляющий шток 13 под действием двуплечего рычага 9 я тяги 15 также проворачивается, уходя вправо. При опускании устройства с грузом на опорную поверхность исчезает усилие в несущих канатах, и захватная лапа 2 под действием пружины 4 проворачивается относительно траверсы 1 и фиксирующим пальцем 5, воздействуя на поверхность защелки 10 двуплечего рычага 9, проворачивает ее вправо до тех пор, пока не войдет с ней в зацепление. Перемещение захватной лапы 2 вызывает проворот захватной лапы 3, направляющий палец 7 которой перемещается в фигурном пазе 6, т. е. обе захватные лапы 2 и 3 зафиксированы-в раскрытом положении и не -препятствуют подъему устройства .без груза. При подъеме устройства с поверхности груза тяга 15 под действием пружины 20 проворачивается на шарнире 16 до встречи с упором 17 и возвращает управляющий шток 13 с бащмаком 14 в исходное вертикальное положение, и устройство опять готово к захвату груза. Предлагаемая конструкция устройства более удобна в эксплуата.ции по сравнению с известной. Формула изобретения Грузозахватное устройство, содержащее траверсу с шарнирно закрепленными на ней кинематически связанными между собой захватными лапами и механизм фиксации захватных лап в раскрытом положении, содержащий подпружиненную поворотную защелку, взаимодействующую с пальцем, закрепленным на одной из захватных лап, отличающееся тем, что, с целью повыщения удобства в эксплуатации, защелка закреплена на траверсе и выполнена в виде двуплечего рычага, свободное плечо которого снабжено шарнирно закрепленным на его конце управляющим штоком, подвижно установленным в направляющих, также шарнирно связанных с двуплечим рычагом посредством подпружиненной жесткой тяги, причем захватные лапы подпружинены относительно траверсы. Источники информации, принятые во внимание при экспертизе 1. Патент США № 3561812, кл. 294-110, 1971.
