(Л
ел
со со со
ел
315
Йзобр м еиие относится к под земно- транспортнои технике, в частности к грузозахв атным ус тройс твам с.
Цель изобретения - улучшение эксплуатационных характеристик о
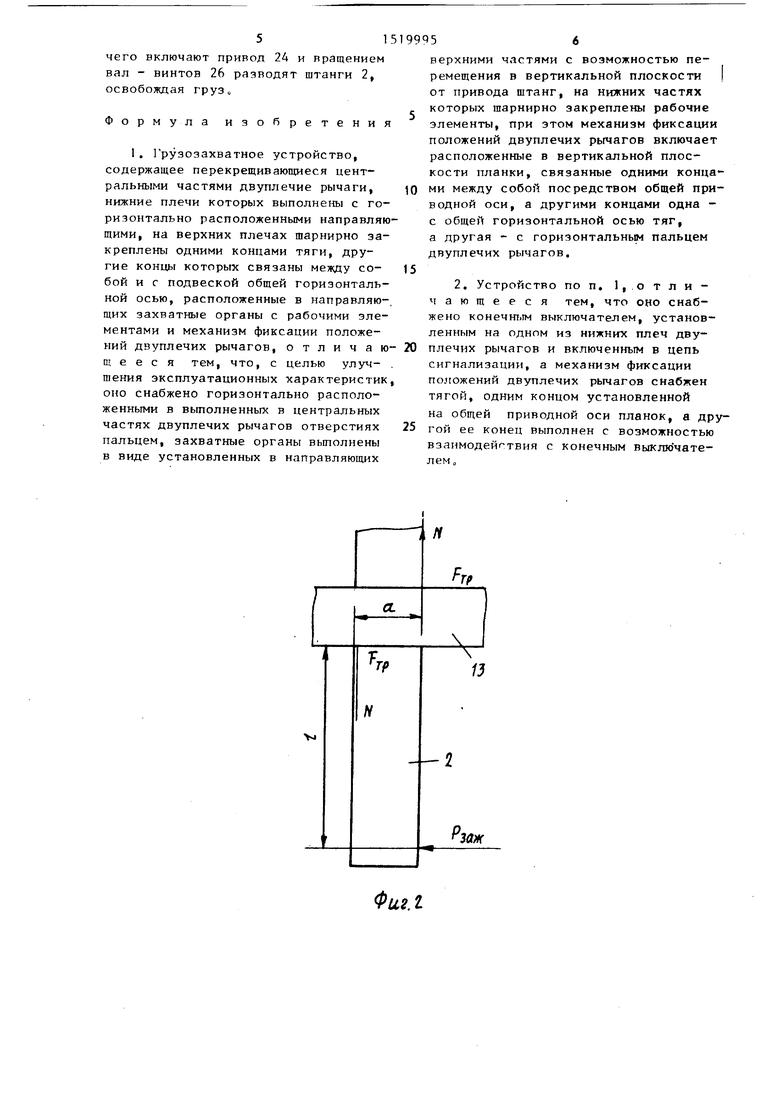
На фиг,1 изображено грузозахватное устройство; оРщий вид; на фиг.2 - схема взаимог|,ействую1а,их сил при зажиме груза.
Грузозахватное устройство состоит из двуплечих рычагов 1 и штанг 2 с рабочими элементами 3 на осях 4, средств для навешивания на двурогий крюк, состоящих из балансира 5 с подвесками в и тяг 7, шарнирно закреп- ленн.1Х на общей з оризонтальной оси 8 и осях 9 двуплечих рычагов 1. Каждый из двуплечих рычагов 1, соединенных пальцем 10, состоит из верхнего 11 и нижнего 12 плеча, которое раздвоено и образует горизонтально расположенные направляюише 13 и 14, связанные между собой по концам замков1,1ми планками 15, При этом двуплечие рычаги 1 могут состоять из нескольких (параллельных) пластин.
Кроме того, на каждую направляющую подвижно посажена штанга 2, Для облегчения перемещения штанг 2 к ним .упруго прикреплены катки 16, Рассмотренная кинематическая пара (штанга 2 на плече 12) для удержания захваченного груза выполнена самотормозящейся. Достигается тто соотношент1ем их параметров из условия самоторможения
2F.
Р, т.е„ возникающие силы трения от взаимодействия штанг 2 с направляющими плеча 12 должны быть боль ше усилия зажима 1 на рабочем элементе 3. Эти силы 1-рения прямо пропорциональны силам реакции в зависимости от материала сопрягаемых деталей, шероховатости, т.е. коэффициента трения f .
Величина нормальной реакции зависит от кинематических параметров и величины зажима: , где а - длина посс шочного места штанги 2; 1 - длина штамги 2 (от рабочего элемента 3 до посадочного места), от сюда N Р
а
1
Таким образом 2-Р-ftp, откуда
3.
получают необходимые параметры штан- гь a.2-l-f, г.е,. например, для длины ми материала конструкционная сталь с Г 0,15 длины посалточного мес0
5
0
9954
та должна быть ). ПОП О, 1 5 300 мм, Иньтми словами, параметры находятся в практических пределах, не затрудняющих их изготовление. Палец 10 двуплечих рычагов 1 и горизонтальная ось 8 тяг 7 связаны между собой планками 1/, связанными между собой приводной осью 18. К последней прикреплен трос 19, наматываемый ita барабан 20 электромеханического привода 21,
На приводную ось 18 одним концом посажена тяга 22, взаимодействующая другим концом с конечным выключателем 23, образуя таким образом устройство сигнализации о снижении степени зажатия груза.
Электромеханический привод 24 предназргачен для синхронного вращения посредством цепной п федачи 25 вал - винтов 26, попарно - с левой и правой навивкой, установлетшых на направляющих 14 двуплечих рычагов , 5 Устройство работает следующим образом.
Навешенное на крюк крана устройство подводят к грузу. Включают привод 21 и, наматывая на барабан 20 трос 19, OTF..TIC/1ЯЮТ ось 18, тем самым осуществляют подъем верхних плечей 11 дпуплечих рычагов 1, Опускают устройство на груз, включают привод 24 который вращает цепной передачей 25 вал - ринта 26, перемещает штанги 5 2, сближая их на грузе до упора рабочих элементов 3 в груз, ггосле чего обратным включением тяги 22 прослаб- ляется трос 19 на величину, не меньшую предшествующему отстоянию оси 18 от вертикальной оси симметрии.
При подъеме сначала произойдет некоторый незначительный поворот штанг 2, а затем самозажим и его подтаем, поскольку двуплечие рычаги 1 и штанги 2 образуют относительно рабочих элементов 3 самотормозящую пару,. Опоры качения не будут препятствовать повороту штанг 2 на рычагах 1, так как они закреплены упруго. 0 Если ось 18 недопустимо близко neper местится к оси симметрии устройства, штанга 2 воздействует с конечным выключателем 23 и включит сигнализацию, предупреждающую о необходимос- 5 ти прекратить транспортные работы,
опустить груз на опору„ I
Снять устройство с груза можно
только уложив его на основание, после
0
0
5
51519995
включают привод 2А и вращением - винтов 26 разводят штанги 2, бождая груз о
в о к э п к м в с а д
Форм у л а изобретения
1. Грузозахватное устройство, содержащее перекрещивающиеся центральными частями двуплечие рычаги, нижние плечи которых выполнены с горизонтально расположенными направляющими, на верхних плечах шарнирно закреплены одними концами тяги, другие концы которых связаны между со- бой и г подвеской общей горизонтальной осью, расположенные в направляю-, щих захватные органы с рабочими элементами и механизм фиксации положений двуплечих рычагов, отличаю- щ е е с я тем, что, с целью улуч- шения эксплуатационных характеристик, оно снабжено горизонтально расположенными в вьтолненньгх в центральных частях двуплечих рычагов отверстиях пальцем, захватные органы выполнены в виде установленных в направляющих
верхними частями с возможностью перемещения в вертикальной плоскости от привода щтанг, на нижних частях которых шарнирно закреплены рабочие элементы, при этом механизм фиксации положений двуплечих рычагов включает расположенные в вертикальной плоскости планки, связанные одними концами между собой посредством общей приводной оси, а другими концами одна - с общей горизонтальной осью тяг, а другая - с горизонтальньм пальцем двуплечих рычагов.
2, Устройство по п, 1,.о т л и - чающееся тем, что оно снабжено конечШ)1м выключателем, установленным на одном из нижних плеч двуплечих рычагов и включенным в цепь сигнализации, а механизм фиксации положений двуплечих рычагов снабжен тягой, одним концом установленной на общей приводной оси планок, а другой ее конец выполнен с возможностью взаимодействия с конечным выклю чате- лем,,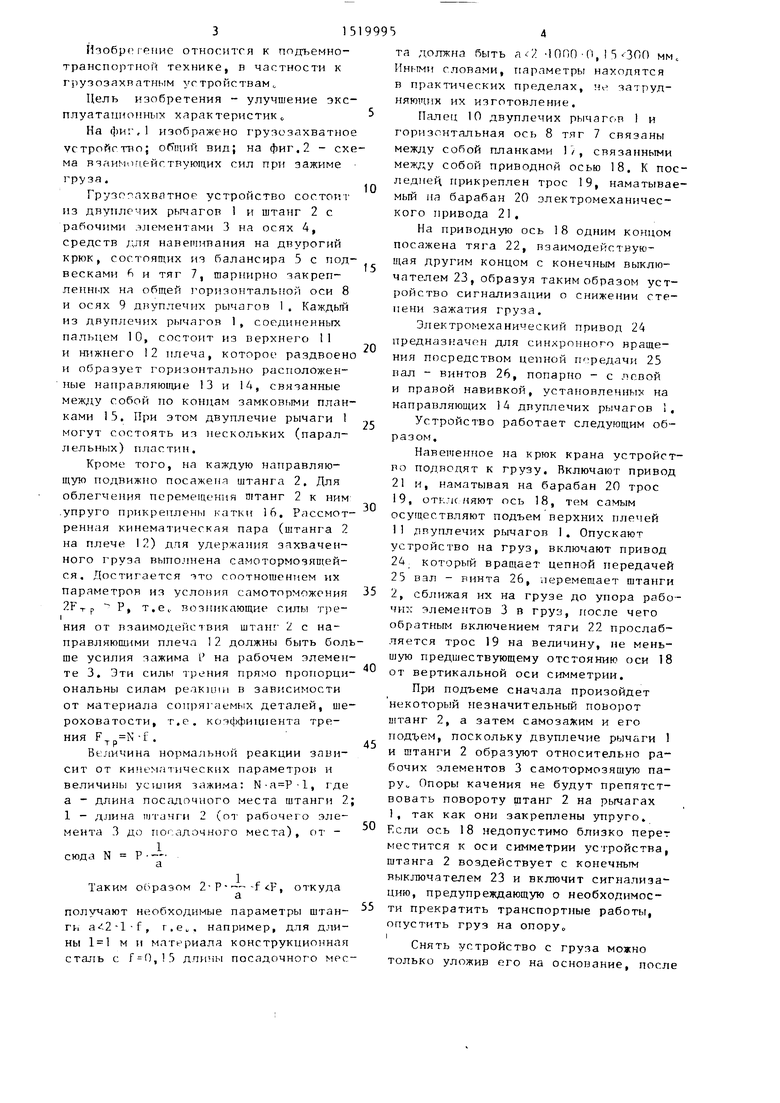
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесное устройство для перемещения груза | 1989 |
|
SU1691233A1 |
| Грузозахватное устройство | 1990 |
|
SU1770252A1 |
| Стенд для испытания грузозахватных устройств | 1991 |
|
SU1789488A1 |
| Подвесной манипулятор | 1972 |
|
SU559819A1 |
| Грузозахватное устройство | 1989 |
|
SU1782909A1 |
| Захват-кантователь | 1987 |
|
SU1472411A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Шасси транспортного средства дляпЕРЕВОзКи длиННОМЕРНыХ гРузОВ | 1979 |
|
SU839784A1 |
| Грузозахватное устройство | 1988 |
|
SU1586991A1 |
| Грузозахватное устройство | 1987 |
|
SU1495264A1 |
Изобретение относится к подъемно-транспортному оборудованию, в частности к грузозахватным устройствам. Цель изобретения - улучшение эксплуатационных характеристик. Цель изобретения - улучшение эксплуатационных характеристик. Грузозахватное устройство содержит связанные пальцем 10 двуплечие рычаги 1, тяги 7, соединенные общей горизонтальной осью 8, плашки 17, одними концами связанные между собой общей приводной осью 8, а другими - с общей горизонтальной осью 8 и пальцем 10. 1 з.п. ф-лы, 2 ил.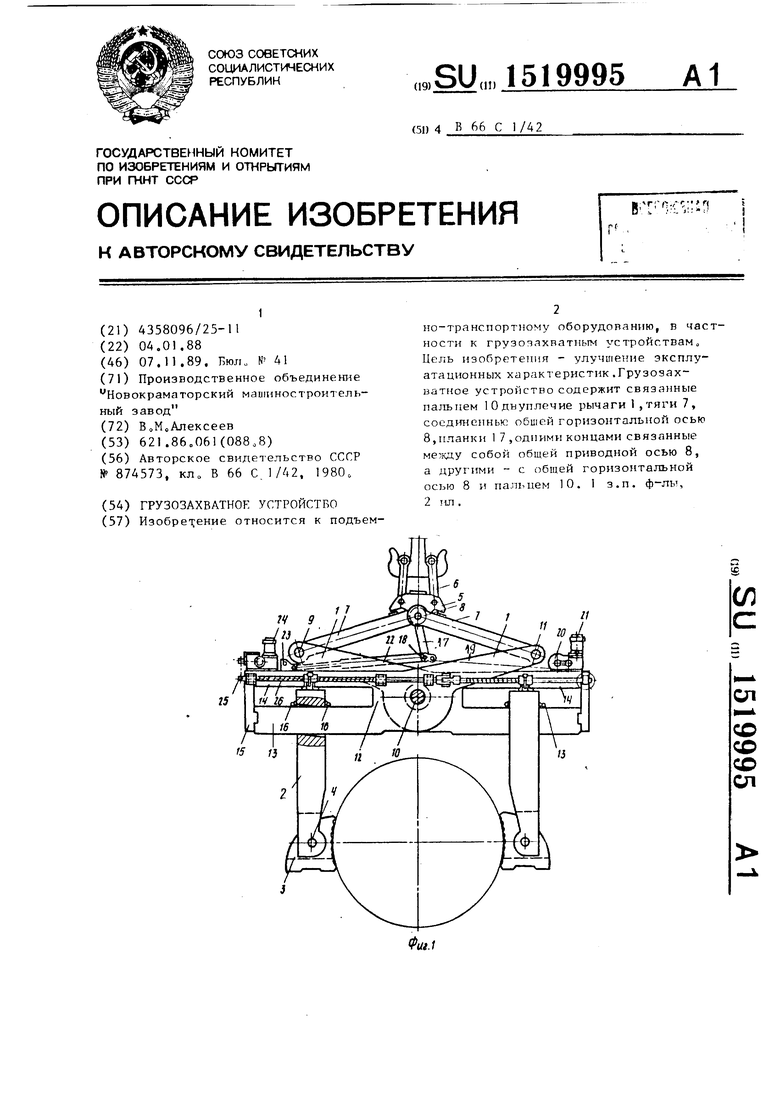
тр
13
| Автоматический клещевой захват для штучных грузов | 1980 |
|
SU874573A1 |
