Изобретение относится к грузозахватным устройствам.
Известно грузозахватное устройство, содержа11|ее траверсу, связанную с ней несущую раму, на которой шарнирно закреплены захватные органы и механизм фиксации положения захватных органов, включающий в себя ползун и звездочку
Однако это устройство предназначено для захвата контейнеров и требует выполнения дополнительных операций по обстрочке груза.
Наиболее близким к изобретению по технической сущности является за-хватное устройство для штучных грузов, содержащее траверсу, установленную на ней с возможностью вертикального перемещения проушину для навешивания на крюк грузоподъемного механизма, шарнирно закрепленные на траверсе захватные лапы, шарнирно соединенные между собой тягой, и механизм фиксации захватных лап 2.
Недостатком известногоустройства является невысокая надежность в ,работе из-за возможности произвольного араба-тывания механизма фиксациипри захвате груза.
Целью изобретения является повышение надежности работы устройства.
Поставленная цель достигается тем, что в захватном устройстве для штучных грузов, содержащем траверсу, установленную на ней с возможностью вертикального перемещения проушину для навешивания на крюк грузоподъемного механизма, шарнирно закрепленные на траверсе захватные лапы, шарнирно соединенные между собой тягой, и механизм фиксации захватных лап, последний включает в себя установленный посредством закрепленных на траверсе вертикальных направляющих папзуи, соединенную с траверсой посредством шатунов планку с выполненными в ней верхними и нижними пазами, двуплечий подпружиненный рычаг, шарнирно закрепленный на ползуне с возможностью поочередно го захода одного из его плеч в нижние па:зы планки, и приводной рычаг, закрепленный на трэверое с возможностью взаимодействия одного из его плеч с проушиной, и приводной рычаг, второе плечо которого соединено жесткой тягой с ползуном и выполнено с горизонтальным пальцем для поочередного захода в верхние пазы планки, при этом первая тяга в своей централы юй части шарнирно прикреплена к njiaHKe.
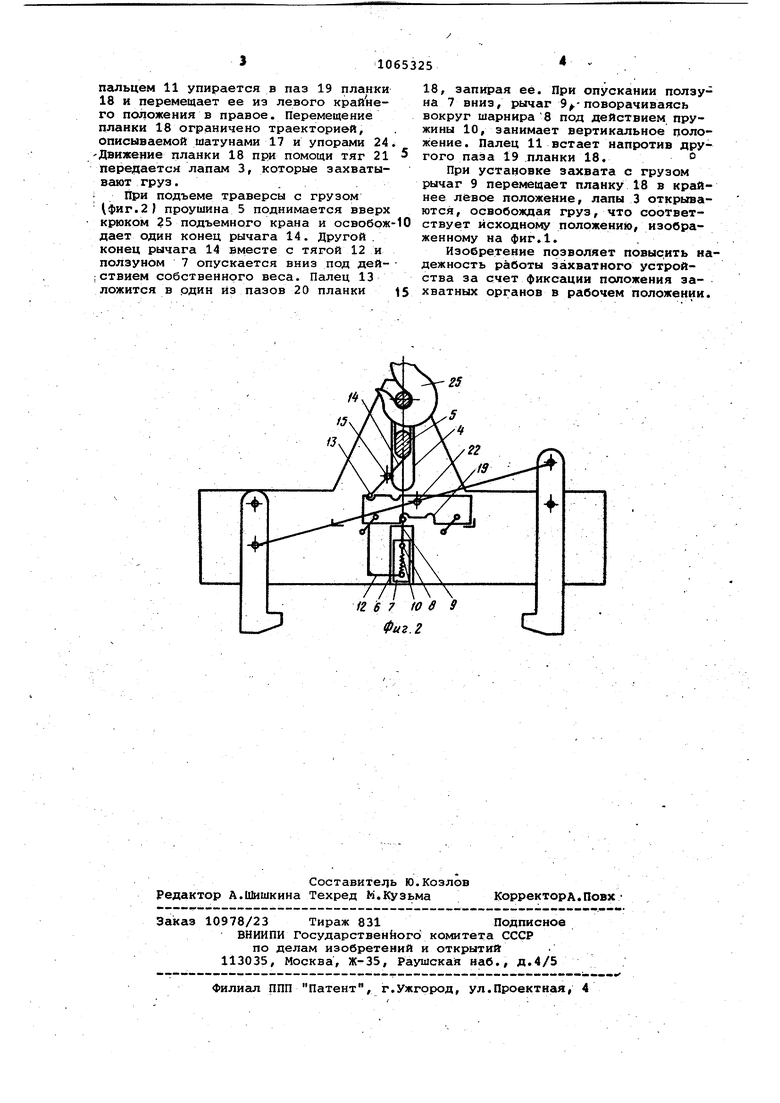
На фиг,1 схематично показано устройство, общий вид, на фиг.2 - устройство в положении захвата груза.
Устройство содержит траверсу 1, на которой на шарнирах 2 установлены захватные лапы 3. В центральной части траверсы 1 закреплены направляющие 4, на которых установлена проушина 5 для навешивания на крюк грузоподъемного механизма. Ниже направляющих 4 закреплены направлякяцие 6, в которых также с возможностью вертикального перемещения установлен ползун 7. В верхней части ползуна 7 с помощью шарнира 8 установлен рычаг 9, нижний конец которого соединен с ползуном 7 пружиной 10, а верхний конец снабжен пальцем 11. Ползун 7 шарнирно соединен с тягой 12,.в верхней части которой имеется палец 13 с приводным рычагом 14. Рычаг 14своей средней частью установлен посредством оси 15 на траверсе 1. На траверсе 1 посредством осей 16 установлены шатуны 17, шарнирно соединенные с планкой 18, имеющей два паза 19 в нижней части и два паза 20 в верхней части. Планка 18 соединена с шарнирными тягами 21 центральным шарниром 22. Тяги 21 соединены с крюками осями 23. Для ограничения перемещения планки 18 на траверсе 1 жестко укреплены упоры 24. Подъем захвата производится при помощи крюка 25 механизма подъема.
Устройство работает следующим образом.
В исходном положении (фиг.1) проушина 5 под действием собственного веса нажимает на один конец рычага 14, другой конец которого находится в поднятом положении. Ползун 7 также находится в крайнем верхнем положеНИИ. Рычаг 9 пальцем 11 прижат к одному из пазов 19 планки 18 при помощи пружины 10. Планка 18 находится в это время в крайнем левом положении, удерживая тяги 21 и оси 22 и 23 лапы 3 в открытом положении.
При подъеме траверсы крюком 25 механизма подъема проушина 5, скользя по направляющим 4 относительно траверсы 1, освобождает один конец рычага 14, а другой конец вместе с тягой 12. и ползуном 7 опускается вниз под действием собственного веса. Палец 13 ложится в один из пазов 20 планки 18, запирая ее и предотвращая ее перемещение, а вместе, с ними и лап 3 При опускании ползуна 7 вниз рычаг 9 поворачиваясь вокруг шарнира 8 под действием ПРУЖИНЫ 10, занимает вертикальное положение. Палец 11 устанавливается напротив паза 19 планки 18.
При установке захвата на штучный груз, например контейнер, проушина 5 под действием собственного веса опускается вниз и нажимает на один конец рычага 14. Другой конец рычага 14 поднимается вверх, увлекая за собой тягу 12 с ползуном 7. Рычаг 9 своим
пальцем 11 упирается в паз 19 планки 18 и перемещает ее из левого край(1его положения в правое. Перемещение планки 18 ограничено траекторией, описываемой шатунами 17 и упорами 24
Движение планки 18 при помощи тяг 21 передается лапам 3, которые захватывают груз.
При подъеме траверсы с грузом 1ФИГ.2) проушина 5 поднимается вверх крюком 25 подъемного крана и освобож дает один конец рычага 14. Другой . конец рычага 14 вместе с тягой 12 и ползуном 7 опускается вниз под дей:ствием собственного веса. Палец 13 ложится в один из пазов 20 планки
18, запирая её. При опускании ползуна 7 вниз, рычаг 9 поворачиваясь вокруг шарнира 8 под действием пружины 10, занимает вертикальное положение. Палец 11 встает напротив другого паза 19 планки 18.
При установке захвата с грузом рычаг 9 перемещает планку 18 в крайнее левое положение, лапы 3 открываются, освобождая груз, что соответствует исходному положению, изображенному на фиг.1. .
Изобретение позволяет повысить надежность работы захватного устройства за счет фиксации положения захватных органов в рабочем положении.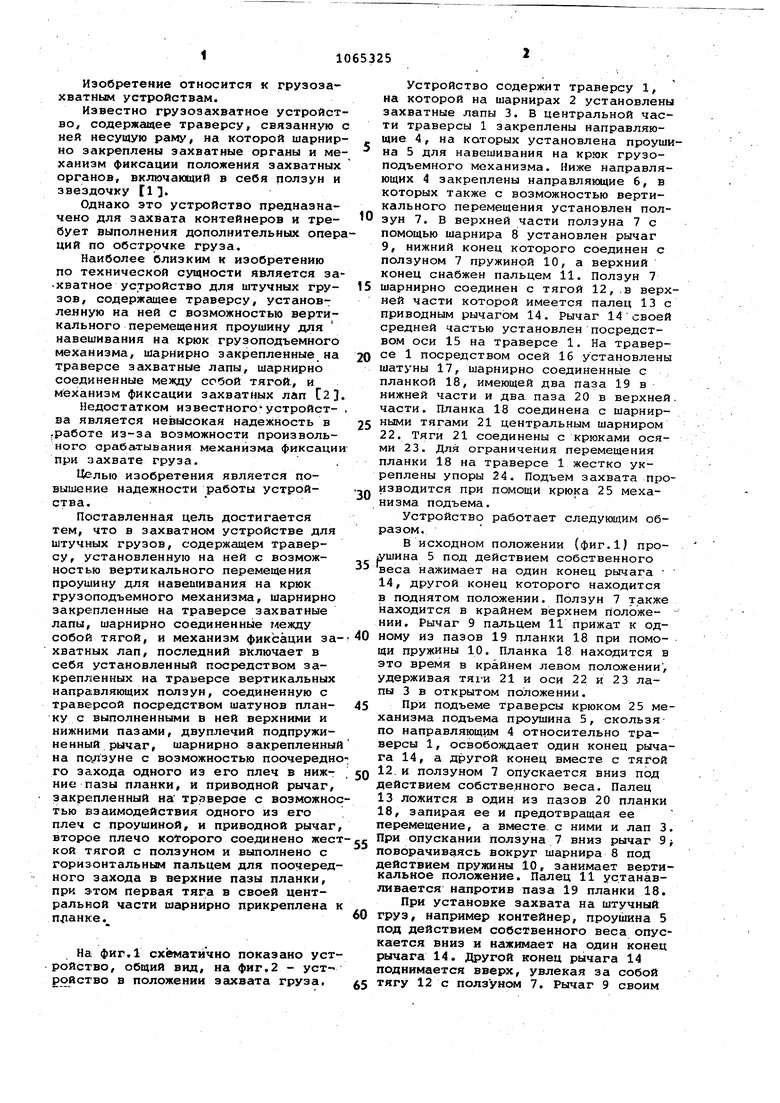
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1990 |
|
SU1770252A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Грузозахватное устройство | 1980 |
|
SU912623A1 |
| Автоматический захват | 1981 |
|
SU1020350A1 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| Грузозахватное устройство | 1983 |
|
SU1118600A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство для железнодорожных звеньев | 1990 |
|
SU1729999A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ШТУЧНЫХ ГРУЗОВ, содержащее траверсу, устаиовленную на ней с воэможнос.тью вертикального перемещения проушину для навешивания на крюк грузоподъемного механизма, шарнириб закрепленные на траверсе захватные , шарнирно соединенные между собой тягой, и механизм фиксации захватных лап. оТлич ающее ся тем, что, с целью повышения надежности работы, механизм фиксации включает в себя установленный посредством закрепленных на траверсе вертикальных направляющих ползун, соединенную с Траверсой посредством шатунов планку с выполненными в ней верхними и нижними пазами, двуплечийподпружиненный рычаг, шарнирно закрепленный на ползуне с возможностью поочередного захода одного из его плеч в нижние пазы планки, и приводной рычаг, закрепленный на траверсе с возможностью взаимодействия одного из его плеч с проушиной, и приводной рычаг, второе плечо которого соединено жесткой тягой с ползуном и выполнено с горизонтальным пальцем для поочередного захода в верхние пазы планки, при этом первая тяга в своей центральной части шарнирно прикреплена к планке. /J Фиг.1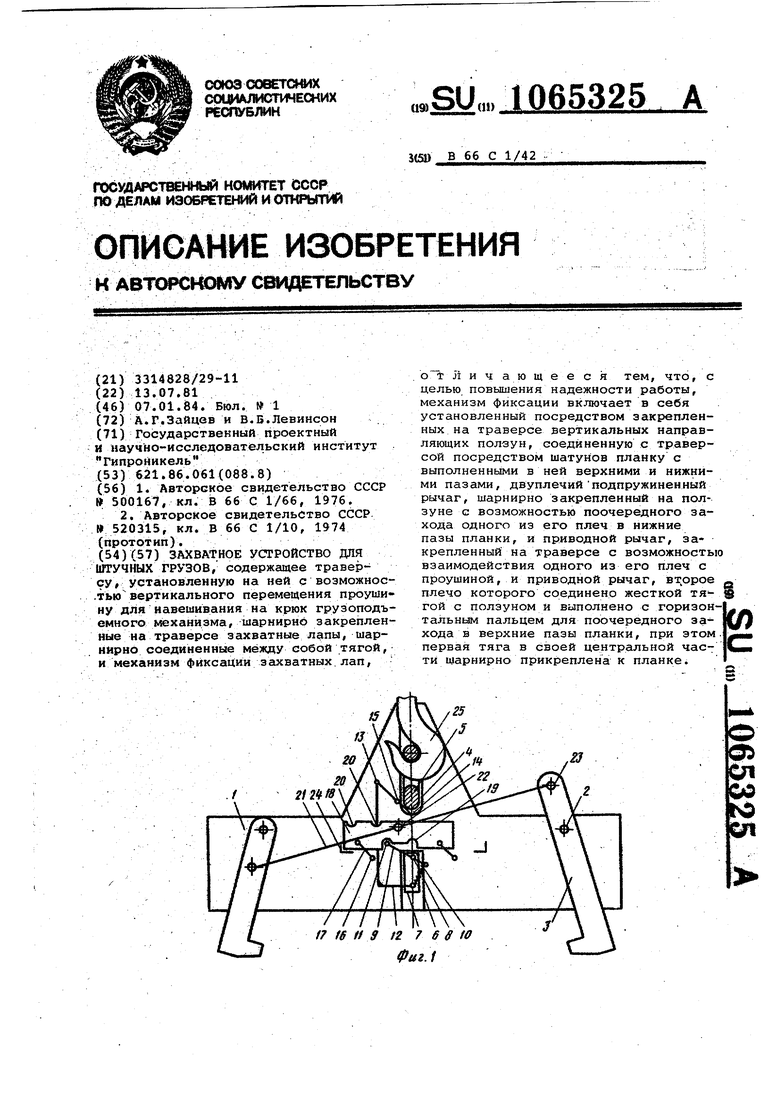
25
/rг
7 /Т
/f 6 7 Ю в 9
cU Фиг. г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматический захват для перемещения штучных грузов | 1972 |
|
SU500167A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автоматическое грузозахватное устройство | 1974 |
|
SU520315A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
