Изобретение относится к грузоподъемным устройствам, а более конкретно к устройствам грузовых механизмов с дистанционным управлением тормозом.
Известна гидравлическая система дистанционного управления тормозом грузоподъемного механизма, имеющим тормозной шкив, содержащая подпружиненный гидроцилиндр с полостью растормаживания, кинематически связанный с тормозным щкивом нерегулируемый насос, гидропривод управления, сообщенный с полостью растормаживания гидроцилиндра и сливной бак 1.
Недостаток известной системы заключается в низкой надежности ее работы, в значительном весе и габаритах.
Цель изобретения - повышение надежности в работе системы и уменьшение ее веса и габаритов путем упрощения ее конструкции.
Цель достигается тем, что в гидравлической системе дистанционного управления тормозом грузоподъемного механизма, имеющим тормозной шкив, содержащей гидродилиндр с полостью растормаживания, кинематически связанный, с тормозным щкивом нерегулируемый насос, гидропривод управления, сообщенный с полостью растормаживания гидроцилиндра, и сливной бак, полость растормаживания гидроцилиндра сообщена си сливным баком посредством двух параллельных гкдролиний, первая из которых снабжена последовательно установленными гидроуправляемым двухходовым распределителем и напорным клапаном а вторая - регулятором потока и кинематически связанным с тормозным щкивом дополнительным насосом, нагнетательная полость которого сообщена со сливны.м баком, а полость гидроугфавления распределителя подсоединена к второй гидролинии, при этом гидроцилиндр выполнен одностороннего действия.
На чертеже изображена принципиальная схема гидравлической системы дистанционного управления тормозом грузоподъемного механизма.
Гидросистема включает в себя гидроцилиндр 1 тормоза одностороннего действия, шток 2 которого соединен с тормозной лентой 3, охватывающей тормозной щкив 4. Цолость 5 растормаживания гидроцилиндра 1 сообщена с гидроприводом управления, вк.пючающим в себя соединенный с баком 6 насос 7, который последоватально соединен с электромагнитным распределителем 8, а параллельно - с соединенным с баком б напорным клапаном 9. Кроме того, полость 5 гидроцилиндра 1 соединена с баком 6 через две параллельные гидролинии, в первой из которых установлены последовательно гидроуправляемый двухходовой распределитель 0 и напорный клапан 11, а во второй - регулятор потока 12 и кинематически связанный с тормозным шкивом 4 насос 13. Нагнетательная полость насоса 13 соединена с баком б, а полость гидроуправления 14 распределителя 10 подсоединена к второй гидролинии между регуляторами 12 потока и насосом 13. В гидроцилиндре I имеется тормозная пружина 15, а в распределителе 10 - пружина 16 возврата. Контроль давления в гидросистеме осуществляется по манометру 17.
Гидросистема работает следующим образом.
При нахождении распределителя 8 в исходном положении насос 7 подает рабочую
жидкость через напорный клапан 9 в бак 6. При включении распределителя 8 в рабочее положение рабочая жидкость насосом 7 подается в полость 5 гидроцилиндра 1 и через регулятор 12 потока в полость 14 распределителя 10, а также к насосу 13, который перекачивать рабочую жидкость в бак 6 не может, так как кинематически соединен с заторможенным пружиной 15 тормозным шкивом 4.
При достижении невысокого давления (15-20 кгс/см) настройки напорного клапана 11 происходит сжатие пружины 16 и переключение распределителя 10. Поступление рабочей жидкости к напорному клапану 11 прекращается, в резу/ьтате чего давление в напорной магистрали насоса 7
увеличивается до срабатывания напорного клапана 9 (ПО-120 кгс/см). При этом в гидроцилиндре 1 сжимается иружина 15 и с помопдью штока 2 происходит ослабление натяжения ленты 3.
Механизм (не показан), соединенный с тормозным шкивом 4, начинает вращаться, а вместе с ним начинает вращаться насос 13, перекачивая поступающую к нему через регулятор 12 потока от насоса 7 рабочую жидкость в бак 6. Частота вращения механизма возрастает и вместе с ним возрастает частота враигения насоса 13, который при этом перекачивает в бак 6 все большее количество рабочей жидкости. Однако регулятор 12 потока отрегулирован на пропуск
5 определенного количества рабочей жидкости при полном использовании которого насосом 13 происходит снижение давления в полости 14 распределителя 10, в результате чего последний под воздействием пружины переключается в исходное положение и направляет поток рабочей жидкости от насоса 7 через напорный клапан 11 в бак 6. При этом давление в напорной ветви насоса 7 и в полости 5 гидроцилиндра 1 снижается до давления настройки напорного клапана И, в результате чего пружина 15 посредством штока 2 и тормозной ленты 3 производит подтормаживание тормозного шкива 4 и соединенного с ним механизма.
частота вращения которого уменьшается, а также уменьшается частота враш.ения соединенного с ним посредством шкива 4 насоса 13. Следовательно, количество перекачиваемой насосом 13 рабочей жидкости уменьшается и возникающий ее избыток приводит к возникновению давления в полости 14 распределителя 10, в результате чего последний, переключившись, перекрывает поступление рабочей жидкости к напорному клапану 11. Давление в полости 5 гидроцилиндра 1 вновь возрастает до давления настройки напорного клапана 9 и вновь начинается растормаживание шкива 4, цикл работы повторяется.
Таким образом, частота вращения шкива 4 и соединенного с ним механизма автоматически поддерживается в заданных пределах и зависит от устанавливаемого регулятором 12 потока количества рабочей жидкости, перекачиваемого насосом 13 в бак 6. Изменяя регулятором 12 потока количество
рабочей жидкости, обеспечивается регулировка скорости вращения механизма в процессе его работы.
Положительный эффект предлагаемого устройства состоит в том, что обеспечивается регулировка скорости вращения механизма в процессе его работы, что позволяет применять его в траловых лебедках и в других механизмах, где требуется изменение скорости вращения без остановки механизма. Точность поддержания установленной скорости вращения зависит, в основном, от точности поддержания регулятором потока установленного расхода рабочей жидкости, и может изменяться в пределах около ±10% что в два раза превышает показатель базового объекта. Кроме того, предлагаемое устройство содержит в своем составе небольшое количество гидроаппаратов, что упрощает его, снижает вес и габариты, а также повышает надежность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая система дистанционного управления тормозом механизма с автоматическим поддержанием скорости вращения | 1982 |
|
SU1024605A1 |
| Система гидроприводов с резервированным контуром управления растормаживанием нагрузки | 2024 |
|
RU2828814C1 |
| Гидравлический привод вращательного действия с клапанным распределением и регулированием скорости вращения | 2016 |
|
RU2623614C1 |
| ГИДРОПРИВОД ЛЕБЕДКИ | 2000 |
|
RU2196722C2 |
| Протаскивающее устройство лесозаготовительной машины | 1988 |
|
SU1576323A1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА ПЛАТФОРМЫ СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2014 |
|
RU2583820C1 |
| Гидропривод грузоподъемной машины на гусеничном ходу | 1980 |
|
SU908738A2 |
| Гидропривод лебедки | 1979 |
|
SU945503A1 |
| Монорельсовая транспортная система | 1988 |
|
SU1525054A1 |
| ГИДРОПРИВОД НАТЯЖНОГО УСТРОЙСТВА РЕМЕННОЙ ПЕРЕДАЧИ | 2009 |
|
RU2399799C1 |
ГИДРАВЛИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ТОРМОЗОМ ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА, имеющим тормозной шкив, содержащая гидроцилиндр с полостью растормаживания, кинематически связанный с тормозным шкивом, нерегулируемый насос, гидропривод управления, сообщенный с полостью растормаживания гидроцилиндра. и сливной бак, отлачающаяся тем, что, с целью повышения надежности в работе и уменьшения веса и габаритов системы путем упрощения ее конструкции, полость растормаживания гидроцилиндра сообщена со сливным баком посредством двух параллельных гидролиний, первая из которых снабжена последовательно установленными гидроуправляемым двухходовым распределителем и напорным клапаном, а вторая - регулятором потока и кинематически связанным с тормозным шкивом дополнительным насосом, нагнетательная полость которого сообщена со сливным баком, а полость гидроуправления распределителя подсоединена к второй гидролинии, при этом гидроцилиндр выполнен одностороннего действия. (Л оо 00 сд ел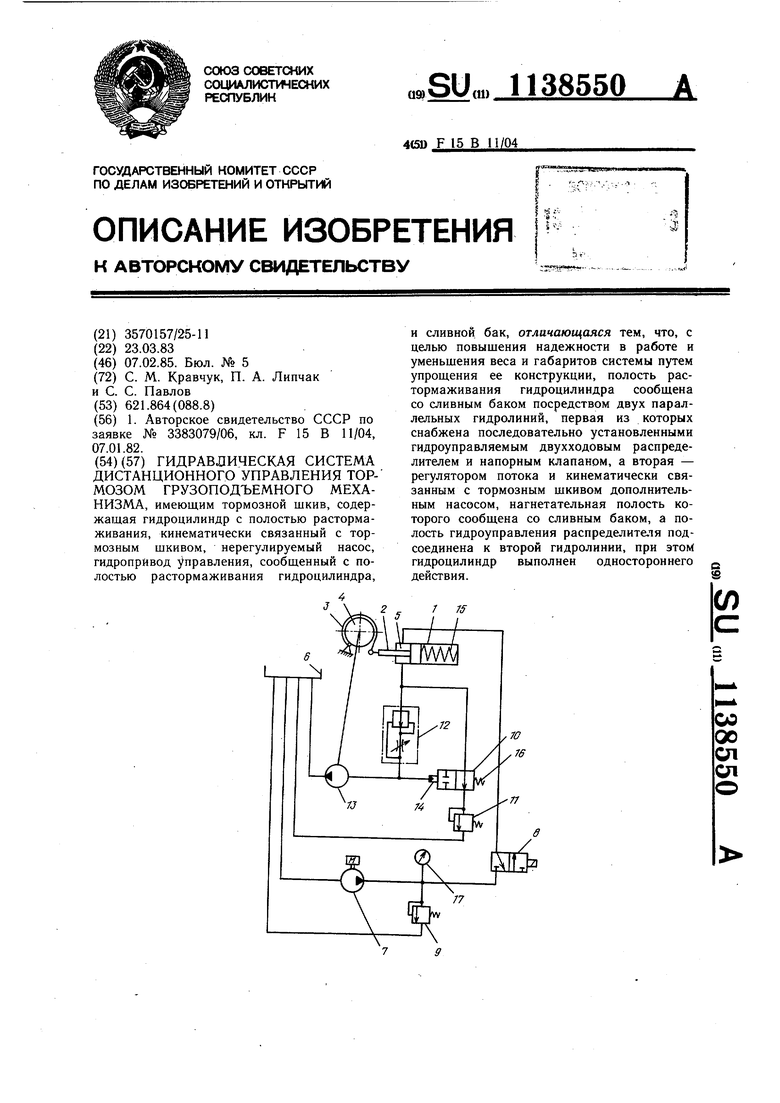
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3383079/06, кл | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
