: Изобретение относится к средствам гидропневмоавтоматики, в частности к приводам систем автоматического управления, и может быть использовано в выходных каскадах цифровых систем управления в роботах, автоматических станочных линиях и т. д.
Известен дискретный исполнительный механизм, содержащий корпус с установленными в нем гибким и щ.естккм зубчатыми колесами, электрогидравлический генератор волн деформации, электрогидравлический дискретный преобразователь, выходной вал, связанный с гибким колесом 1.
Однако известный механизм имеет недостаточно высокую надежность, обусловленную сложностью конструкции электрогидравлического генератора волн деформации.
Известен также электрогидравлический шаговый привод, содержащий корпус с установленными в нем гибким и жестким зубчатыми колесами, электрогидравлический генератор волн деформаций, содержащий корпус, радиально установленные в нем с возможностью взаимодействия с гибким зубчатым колесом поршни и электрогидравлический дискретный преобразователь, выполненный в виде управляемого от электромагнитов через два толкателя плоского четырехкромочного золотника установленного на упругом подвесе с возможностью перекрытия четырех коммутационных окон, расположенных в корпусе генератора, каждое из которых сообщено с парой диаметрально расположенных поршней, и выходной вал, соединенный с гибким зубчатым колесом 2.
Недостатком известного шагового привода является то, что электрогидравлический преобразователь закреплен снаружи корпуса привода, что приводит к увеличению габаритов и массы привода. Наличие двух элементов в плоском золотнике и сложная пространственная система коммутационных окон и каналов усложняет технологию изготовления и уменьшает надежность привода.
Цель изобретения - упрощение конструкции, повышение надежности и улучшение энергомассовых характеристик привода.
Поставленная цель достигается тем, что в электрогидравлическом шаговом приводе, содержащем корпус с установленными в нем гибким и жестким зубчатыми колесами, электрогидравлический генератор волн деформации, содержащий корпус, радиально установленные в нем с возможностью взаимодействия с гибким зубчатым колесом поршни и электрогидравлический дискретный преобразователь, выполненный в виде управляемого от электромагнитов через два толкателя плоского четырехкромочного золотника, установленного на упругом подвесе с возможностью перекрытия четырех коммутационных окон, расположенных в корпусе генератора, каждое из которых сообщено с парой диаметрально расположенных порщней, и выходной вал, соединенный с гибким
зубчатым колесом, коммутационные окна расположены со стороны внутреннего торца корпуса генератора попарно симметрично относительно оси выходного вала, упругий подвес выполнен в виде нескольких тонкостенных цилиндрических упругих колец и жестких секторных проставок, а плоский золотник выполнен в виде цилиндрической шайбы, установленной в корпусе генератора эксцентрично оси выходного вала с возможностью перемещения в двух взаимно перпендикулярных плоскостях симметрии коммутационных окон.
На фиг. 1 представлен электрогидравлический шаговый привод, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3- разрез Б-Б на фиг. 1.
Электрогидравлический шаговый привод содержит корпус 1 с установленными в нем гибким и жестким зубчатыми колесами 2 и 3, электрогидравлический генератор волн деформации, содержащий корпус 4. Гибкое
зубчатое колесо 3 жестко связано с выходным валом 5, установленным в подшипниках б и 7. В корпусе 4 радиально расположены с возможностью взаимодействия с гибким колесом 2 порщни 8. Пружины 9,
0 установленные в рабочих полостях 10, обеспечивают постоянный контакт поршней 8 .с гибким колесом 2. На внутреннем торце 11 корпуса 4 выполнены окно 12 питания, окно 13 слива и четыре коммутационных окна 14, а последние расположены попарно
симметрично относительно оси 15 выходного вала 5. Каждое окно 14 сообщено с парой рабочих полостей 10 диаметрально расположенных поршней 8 каналом 16. Кроме того, электрогидравлический генератор волн
Q деформации содержит гидравлический дискретный преобразователь, содержащий управляемый от двух электромагнитов 17 через два толкателя 18 плоский четырехкромочный золотник, выполненный в виде цилиндрической шайбы 19, установленной в корпусе 4
эксцентрично оси 15 выходного вала 5 с возможностью перемещения в двух взаимно перпендикулярных плоскостях 20 и 21 (фиг. 2) симметрии коммутационных окон 14. Шайба 19 установлена на упругом подвесе,
Q выполненном в виде нескольких тонкостенных цилиндрических упругих колец 22 и жестких секторных проставок 23, соединяющих, например, с помощью точечной сварки все упомянутые узлы упругого подвеса и золотника в единое целое. Обойма 24 обеспечивает
5 требуемый зазор между шайбой 19 и корпусом 4. Опора 25 шайбы 19 фиксируется на корпусе 4 с помощью штифта 26. Электромагниты 17 расположены на -опоре 27. Якорь 28 каждого электромагнита 17 выполнен как одно целое с толкателем 18 и имеет пружинные шарниры 29. Привод работает следующим образом. В исходном положении цилиндрической шайбы 19, когда оба электромагнита 17 обесточены, под действием упругих сил шайба 19 перекрывает коммутационные окна 14 таким образом, что два из них сообщаются с окном 12 питания, а два другие - с окном 13 слива. Рабочая жидкость, поступающая через окно 12 питания и связанные с ним через щайбу 19 коммутационные окна 14, Ооеснечивает контакт по зубьям гибкого и жесткого колес 2 и 3. При подаче электрического, управляющего импульса на один из электромагнитов 17 его якорь 28 втягивается, что вызывает перемещение толкателя 18 и вместе с ним и шайбы 19 вдоль одной из взаимно перпендикулярных осей 20 или 21, переключая коммутационные окна 14. В результате одна из пар рабочих полостей 10, заполненная рабочей жидкостью в исходном положении шайбы 19, сообщаетtя с окном 13 слива, а расположенная под, углом 90° по отношению к ней пара рабочих полостей 10, ранее сообщавшаяся с окном 13 слива, заполняется рабочей жидкостью. При этом вершина волн деформации смещает на фазовый угол гибкое колесо 2 и вместе с ним и выходной вал 5. При подаче следующего электрического импульса на второй электромагнит 17 происходит сообщение пары рабочих полостей 10, расположенных под углом 90° по отношению к предыдущей паре с окном 12 питания, а предыдущая пара рабочих полостей 10 сообщается с окном 13 слива. В результате осуществляется второй шаг поворота гибкого колеса 2 и выходного вала 5. Если следует серия управляющих импульсов, цилиндрическая шайба 19 соверщает плоское планетарное движение, подключая пары диаметрально противоположных рабочих полостей 10 к окну 12 питания, каждый раз сообщая пары полостей 10, расположенных под углом 90°, с вновь включенными к окну 13 слива. Когда серия управляющих импульсов отработана, оба электромагнита 17 могут оставаться включенными или обесточенными в любом сочетании, определяющем новое фиксированное положение выходного вала 5 в конце процесса регулирования. Технико-экономическая эффективность от использования предлагаемого привода, заключается в упрощении конструкции за счет выполнения плоского четырехкромочного золотника в виде щайбы с возможностью перемещения ее в двух взаимно перпендикулярных плоскостях симметрии коммутационных окон, а также в повышении надежности улучшении энергомассовых характеристик путем расположения электрогидравлического дискретного преобразователя на внутреннем торце корпуса генератора, что в целом расщиряет область применения привода.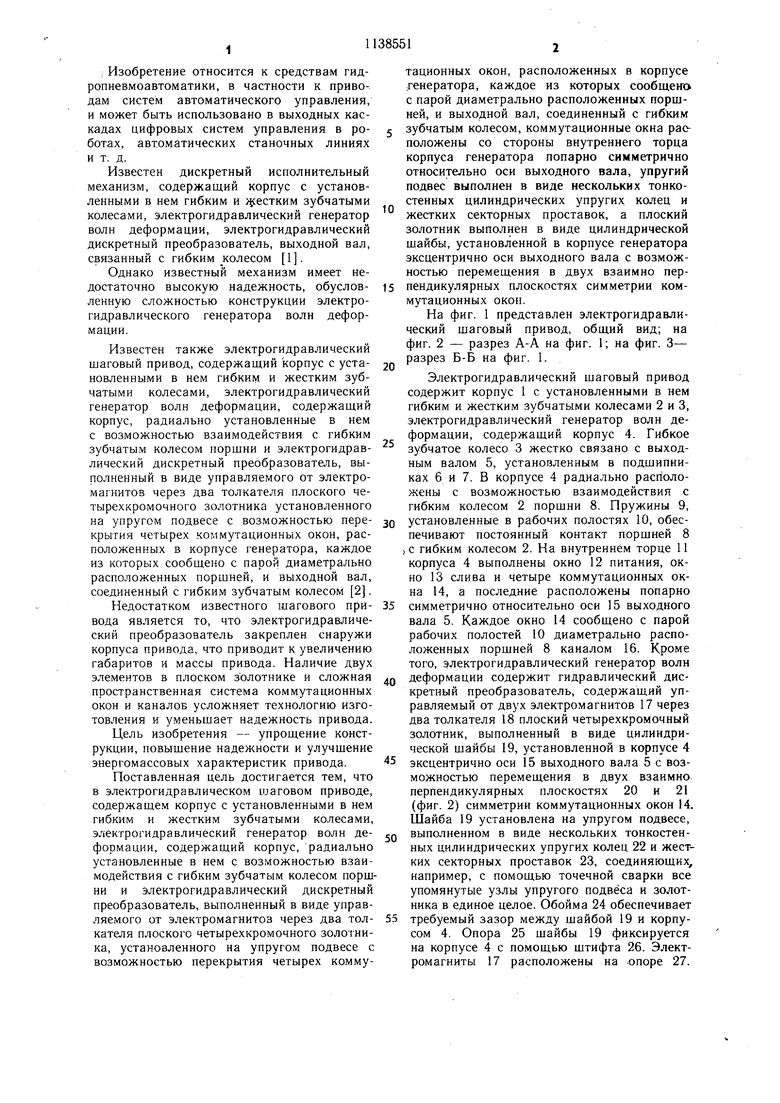

| название | год | авторы | номер документа |
|---|---|---|---|
| Дискретный исполнительный механизм | 1980 |
|
SU949229A1 |
| Электрогидравлическая система управления | 1987 |
|
SU1527417A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСКРЕТНЫЙ ПОВОРОТНЫЙ ПРИВОД | 2016 |
|
RU2642010C1 |
| ШАГОВЫЙ ГИДРОПРИВОД | 1971 |
|
SU414437A1 |
| Электрогидравлический дискретный преобразователь | 1986 |
|
SU1362865A1 |
| Гидравлический шаговый привод | 1971 |
|
SU477260A1 |
| Шаговый гидромотор | 1987 |
|
SU1530824A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ СО СТРУЙНЫМ УСИЛИТЕЛЕМ В ПЕРВОМ КАСКАДЕ | 2015 |
|
RU2594094C1 |
ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ШАГОВЫЙ ПРИВОД, содержащий корпус с установленными в нем гибким и жестким зубчатыми колесами, электрогидравлический генератор волн деформации, содержащий корпус, радиально установленные в нем с возможностью взаимодействия с гибким зубчатым колесом поршни и электрогидравлический дискретный преобразователь, выполненный в виде-управляемого от электро25 магнитов через два толкателя плоского четырехкромочного золотника, установленного на упругом подвесе с возможностью перекрытия четырех коммутационных окон, расположенных в корпусе генератора, каждое из которых сообщено с парой диаметрально расположенных порщней, и выходной вал, соединенный с гибким зубчатым колесом, отличающийся тем, что, с целью упрощения конструкции, повышения надежности и улучщения энергомассовых характеристик, коммутационные окна расположены со стороны внутреннего торца корпуса генератора попарно симметрично относительно оси выходного вала, упругий подвес выполнен в виде нескольких тонкостенных цилиндрических упругих колец и жестких секторных проставок, а плоский золотник выполнен в виде цилиндрической шайбы, установленной в (Л корпусе генератора эксцентрично оси выходного вала с возможностью перемещения в двух взаимно перпендикулярных плоскостях симметрии коммутационных окон. оо СХ) 01 ел
24
72
19
25
6-6
Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шаговый двигатель | 1973 |
|
SU530961A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дискретный исполнительный механизм | 1980 |
|
SU949229A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
