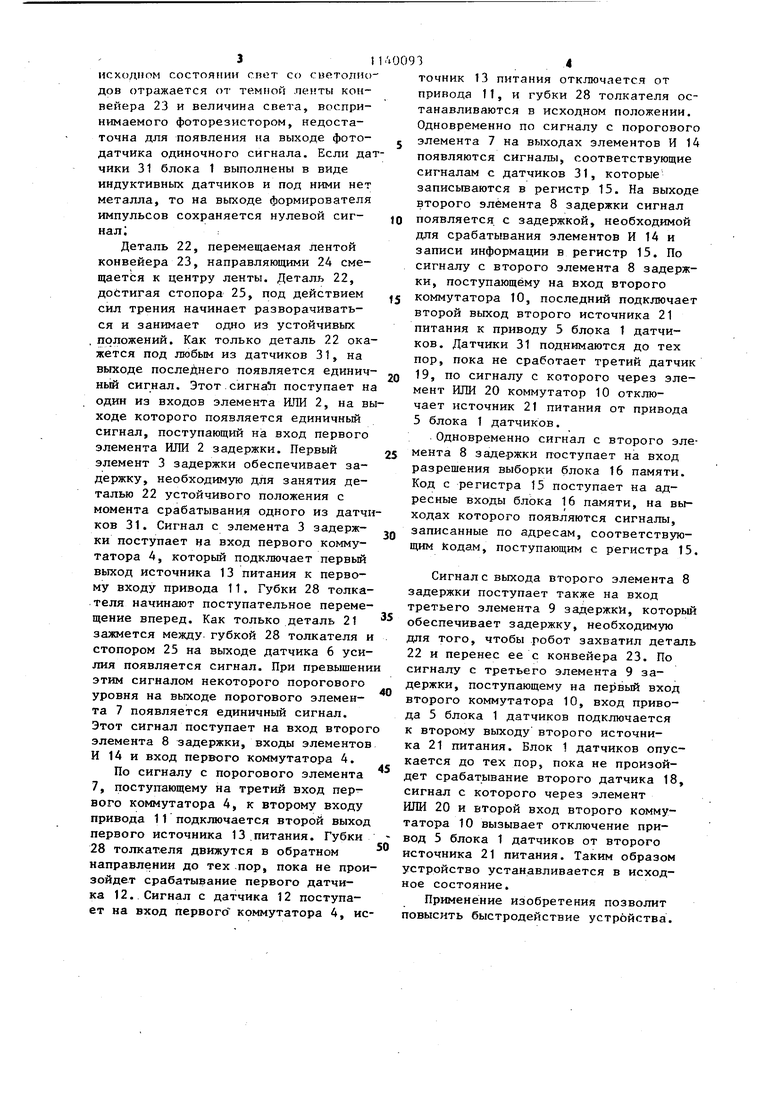
111 Изобретение относится к робототех нике и может быть исггользовано при создании адаптивных роботов. Известно устройство для управлени .чдаптивными роботами, содержащее телевизионную камеру, блок управления и сервоприводы Щ. Однако данное устройство сложно по конструкции. Наиболее близким к предлагаемому является устройство, содержащее последовательно соединенные датчик усилия, пороговьм элемент и первый коммутатор, блок памяти, выходы которого соединены с выходами устройства, а также второй коммутатор, подключен ный первым и вторым выходами к соответствующим входам первого привода, связанного с блоком датчиков, выходы которого соединены с входами первого элемента ИЛИ и первыми входами элементов И, подключенных вторыми входа ми к выходу порогового элемента. Недостатком известного устройства является его невысокое быстродействи обусловленное значительными затратам времени на ориентацию и перемещение детали. Цель изобретения - повышение быст родействия устройства. Цель достигается тем, что устройс во, содержащее последовательно соеди ненные датчик усилия, пороговый элемент и первый коммутатор, блок памяти, выходы которого соединены с выхо дами устройства, а также второй коммутатор, подключенный первым и вторым выходами к соответствующим входам первого привода, связанного с блоком датчиков, выходы которого сое динены с входами первого элемента ИЛ и с первыми входами элементов И, под ключенных вторыми входами к выходу порогового элемента, содержит первый второй и третий датчики контакта, первый, второй и третий элементы задержки, первый и второй источники питания, второй привод, регистр и второй элемент ИЛИ, первьш и второй входы которого соединены с выходами второго и третьего датчиков контакта соответственно, а выход - с первьм входом второго коммутатора, подключенного вторым и третьим входами к первому и второму выходам второго источника питания соответственно, четвертым входом - к выходу третьего элемента падб-рч ки, а пятым пхо:з2дом - к пходу третьего элемента задержки и выходу второго элемента задержки, вход которого соединен с выходом порогового элемента, входы регистра подключены к выходам элементов И, а выходы - к первым входам .блока памяти, второй вход которого соединен с выходом второго элемента задержки, выход первого элемента ШШ подключен к входу первого элемента задержки, подключенного выходом к второму входу первого коммутатора, третий и четвертый входы которого соединены с первым и вторым выходами первого источника питания соответственно, пятый вход - с выходом первого датчика контакта, а первый и второй выходы - с соответствующими входами второго привода, связанного с датчиком усилия. На фиг. 1 представлена функциональная схема устройства; на фиг.2схема разрешения механических эле-, ментов. Устройство содержит блок 1 датчиков, первый элемент ИЛИ 2, первый элемент 3 задержки, первый коммутатор 4, первьй привод 5, датчик 6 усилия, пороговый элемент 7, второй и третий элементы 8 и 9 задержки соответственно, второй коммутатор 10, второй привод 11, первый датчик 12 контакта, первый источник 13 питания, элементы И 14, регистр 15, блок 16 памяти, выходы 17 устройства, второй и третий датчики 18 и 19 контак.та соответственно, второй элемент ИЛИ 20, второй источник 21 питания, деталь 22, конвейер 23, первые направляющие 24, стопор 25, первый двигатель 26, первый редуктор 27, губ ки 28 толкателя, несущие 29, вторые направляющие 30, датчики 31, второй двигатель 32, второй редуктор 33, третья, несуп1ая 34, выступ 35. Устройство работает следующим образом. В исходном состоянии блок 1 датчиков расположен над лентой конвейера 23, второй датчик 18 контакта замкнут, отключен от источника 21 питания. Толкатель находится в крайнем заднем положении, первьп датчик 12 замкнут, привод 11 отключен от источника 13 питания. На выходе каждого датчика 31 нулевой сигнал. Если датчики 31 выполнены в виде фотодатчиков, то в исходном состоянии спет со с етолис)дов отражается от ленты конвейера 23 и величина света, воспринимаемого фоторезистором, недостаточна для появления на выходе фотодатчика одиночного сигнала. Если дат чики 31 блока 1 выполнены в виде индуктивных датчиков и под ними нет металла, то на выходе формирователя импульсов сохраняется нулевой сигналДеталь 22, перемещаемая лентой конвейера 23, направляющими 24 смещаетЬя к центру ленты. Деталь 22, достигая стопора 25, под действием сил трения начинает разворачиваться и занимает одно из устойчивых положений. Как только деталь 22 ока жется под любым из датчиков 31, на выходе последнего появляется единичный сигнал. Этот.сигна51 поступает н один из входов элемента ИЛИ 2, на вы ходе которого появляется единичный сигнал, поступающий на вход первого элемента ИЛИ 2 задержки. Первый элемент 3 задержки обеспечивает задержку, необходимую для занятия деталью 22 устойчивого положения с момента срабатывания одного из датчи ков 31. Сигнал с элемента 3 задержки поступает на вход первого коммутатора 4, который подключает первый выход источника 13 питания к первому входу привода 11. Губки 28 толкателя начинают поступательное перемещение вперед. Как только деталь 21 зажмется между, губкой 28 толкателя и стопором 25 на выходе датчика 6 усилия появляется сигнал. При превышени этим сигналом некоторого порогового уровня на выходе порогового элемента 7 появляется единичный сигнал. Этот сигнал поступает на вход второг элемента 8 задержки, входы элементов И 14 и вход первого коммутатора 4. По сигналу с порогового элемента 7, поступающему на третий вход пер- вого коммутатора 4, к второму входу привода 11 подключается второй выход первого источника 13.питания. Губки 28 толкателя движутся в обратном направлении до тех пор, пока не прои зойдет срабатывание первого датчика 12. Сигнал с датчика 12 поступает на вход первого коммутатора 4, ис точник 13 питания отключается от привода 11, и губки 28 толкателя останавливаются в исходном положении. Одновременно по сигналу с порогового элемента 7 на выходах элементов И 14 появляются сигналы, соответствующие сигналам с датчиков 31, которые записываются в регистр 15. На выходе второго элемента 8 задержки сигнал появляется с задержкой, необходимой для срабатывания элементов И 14 и записи информации в регистр 15. По сигналу с второго элемента 8 задержки, поступающему на вход второго коммутатора 10, последний подключает второй выход второго источника 21 питания к приводу 5 блока 1 датчиков. Датчики 31 поднимаются до тех пор, пока не сработает третий датчик 19, по сигналу с которого через элемент ИЛИ 20 коммутатор 10 отключает источник 21 питания от привода 5 блока 1 датчиков. Одновременно сигнал с второго элемента 8 задержки поступает на вход разрешения выборки блока 16 памяти. Код с регистра 15 поступает на адресные входы блока 16 памяти, на выходах которого появляются сигналы, записанные по адресам, соответствующим Кодам, поступающим с регистра 15. Сигнал с выхода второго элемента 8 задержки поступает также на вход третьего элемента 9 задержки, который обеспечивает задержку, необходимую для того, чтобы робот захватил деталь 22 и перенес ее с конвейера 23. По сигналу с третьего элемента 9 задержки, поступающему на первый вход второго коммутатора 10, вход привода 5 блока 1 датчиков подключается к второму выходу второго источника 21 питания. Блок 1 датчиков опускается до тех пор, пока не произойдет срабатывание второго датчика 18, сигнал с которого через элемент ИЛИ 20 и второй вход второго коммутатора 10 вызывает отключение привод 5 блока 1 датчиков от второго источника 21 питания. Таким образом устройство устанавливается в исходое состояние. Применение изобретения позволит повысить быстродействие устройства.
пп
тг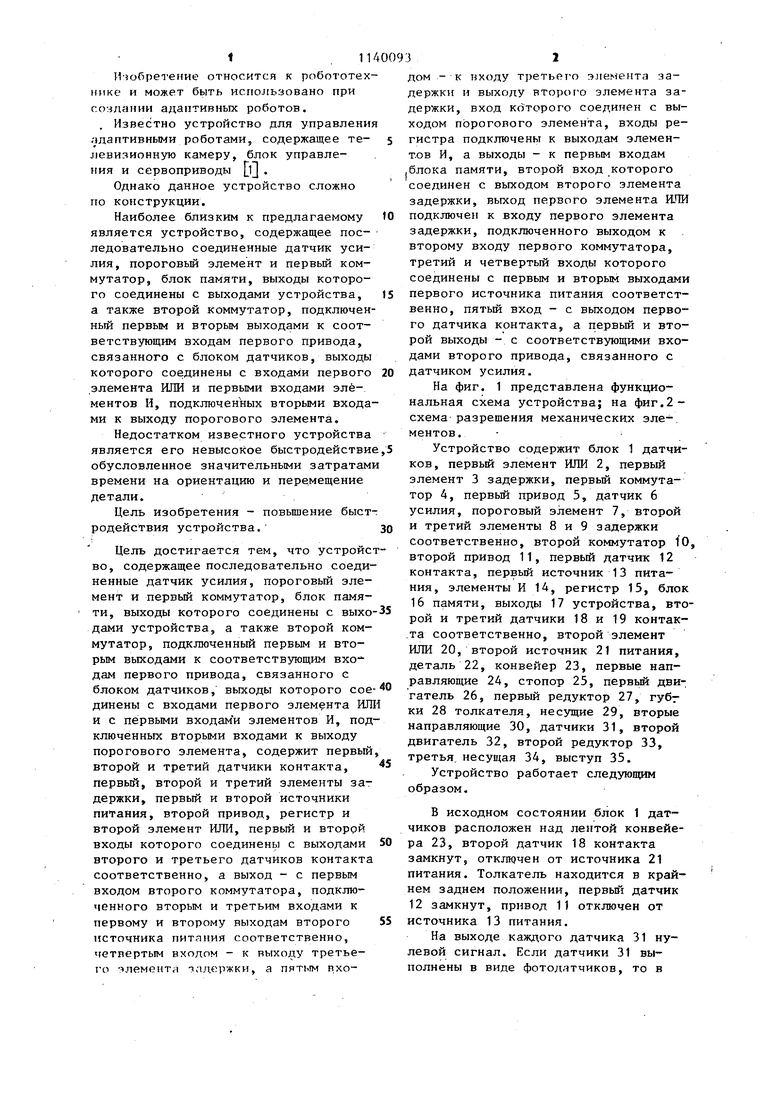
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления промышленными роботами | 1982 |
|
SU1072000A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для определения центров круглых предметов | 1983 |
|
SU1095135A1 |
| Устройство для управления робототизированным комплексом | 1985 |
|
SU1278203A1 |
| УСТРОЙСТВО КОДИРОВАНИЯ И ПЕРЕДАЧИ СИГНАЛОВ | 2004 |
|
RU2282246C2 |
| Устройство для управления роботом- окрасчиком | 1978 |
|
SU744454A1 |
| Устройство для сварки | 1987 |
|
SU1558598A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ СВЯЗИ | 2005 |
|
RU2286597C1 |
| Устройство для управления роботом технологического конвейера | 1980 |
|
SU1096609A1 |
| Устройство для считывания информации | 1982 |
|
SU1084838A1 |
УСТРОЙСТВО ДОЯ УПРАВЛЕНИЯ АДАПТИВНЬМ РОБОТОМ, содержащее последовательно соединенные датчик усилия, пороговый элемент и первый коммутатор, блок памяти, выходы-которого соединены с выходами устройства, а также второй коммутатор, подключенный первым и вторым выходами к соответствующим входам первого привода, связанного с блоком датчиков, выходы которого соединены с входами первого элемента ИЛИ и с первыми входами элементов И, подключенных вторыми входами к выходу порогового элемента, отличающееся тем, что, с целью повьапения быстродействия устройства, оно содержит первый, второй и третий датчики контакта, первый, второй и третий элементы задержки, первый,и-второй источники питания, второй привод, регистр и второй элемент ИЛИ, первьй и второй входы которого соединены с выходами второго и третьего датчиков контакта соответственно, а выход - с первым входом второго ком:мутатора, подключенного вторым и третьим входами к первому и второму выходам второго источника питания соответственно, четвертым входом к выходу третьего элемента задержки, а пятьЕм входом - к входу третье Го элемента задержки и выходу второго элемента .задержки, вход которого ;соединен с выходом порогового элеСП мента, входы регистра подключены к выходам элементов И, а выходы - к первым входам блока памяти, второй вход которого соединен с выходом второго элемента задержки, выход первого элe teнтa ИЛИ подключен к входу первого элемента задержки, подключенного выходом к второму входу первоNU го коьмутатора, третий и четвертый входы которого соединены с первым О ее и вторьм выходами первого источника питания соответственно, пятый вход с выходом первого датчика контакта, а первый и второй выходы - с соответствукицими входами второго привода, связанного с датчиком усилия.
17
Г /7
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Катыс Г.П | |||
| Оптические информационные системы роботов-манипуляторов | |||
| М., Машиностроение, 1977, с | |||
| Насос | 1917 |
|
SU13A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 2868277/24, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
