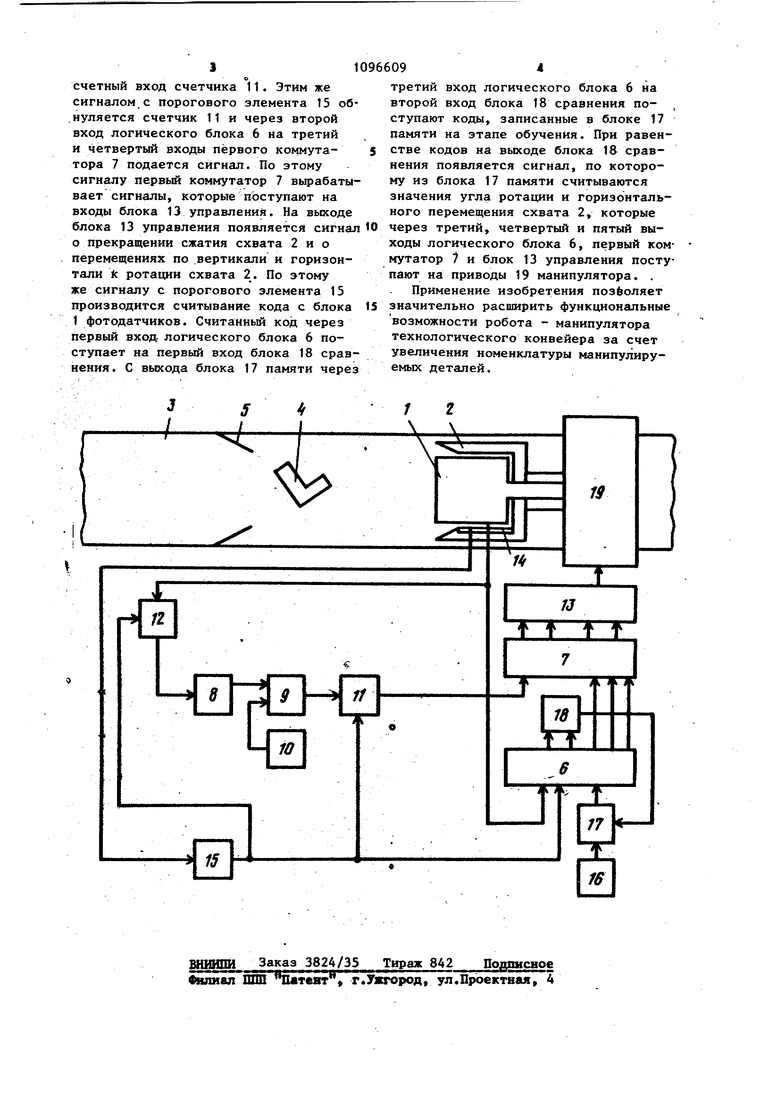
Изобретение .относится к робототехнике и может быть использовано пр создании устройств для управления ро ботом, обслуживающим поточные конвейерные линии. Известно устройство для управления роботом технологического конвейера, содержащее исполнительный оргаН;,робота, блок управления, ЭВМ, телевизионную камеру и блок визуального управление lj . Однако такое устройство имеет низкую точность определения параметров объекта. Наиболее близким к изобретению является устройство, содержащее последовательно соединенные пульт упра ления, блок памяти, логический блок, первый коммутатор, фток управления и приводы исполнительного органа робот а также блок фотодатчиков, подключен ный выходом к второму входу логического блока, и генератор тактовых импульсов, соединенный выходом с первы входом элемента И zj . Недостатком известного устройства является существенное ограничение по форме объекта - устройство манипулирует только с объектами круглой формы, не имеющими отверстий. Цель изобретения - расширение фун циональных возможностей устройства. Цель достигается тем, что устройство содержит блок сравнения, счетчи и последовательно соединенные датчик усилия схвата, пороговый элемент, вт рой коммутатор и нуль-орган, выход которого подключен к второму входу элемента И, соединенного выходом с первым входом счетчика, второй вход которого подключен к выходу порогового элемента и третьему входу логического блока, а выход - к второму |вх6ду первого коммутатора, вторые выходы логического блока соединены с входами блока сравнения, выход которого подключен к второму входу блока памяти, причем второй выход второго коммутатора соединен с выходом блока фотодатчиков. На чертеже представлена функциональная Схема устройства. Устройство содержит блок 1 .фотодатчиков, схват 2 исполнительного органа, ленту 3 конвейера, деталь 4, направляю1цие 5, логический блок 6, второй коммутатор 7, нуль-орган 8, элемент И 9, генератор 10 тактовых импульсов, счетчик 11, первый коммутатор 12, блок 13 управления, датчик 14 усилия схвата, пороговый элемент 15, пульт 16 управления, блок 17 памяти, блок 18 сравнения и приводы 19 исполнительного органа робота. Устройство работает следующим образом. На этапе обучени1я оператор с пуль та 16 управления вносит в блок 17 памяти информацию о коде сигналов блока 1 фотодатчиков для каждого фиксированного положения детали 4,угле поворота и горизонтальном перемещении схвата 2, соответствукяцем данному коду, а затем переключает пульт 16 управления в рабочий режим. Деталь 4, перемещаемая Лентой 3 конвейера, направпяквцямк 5 смещается к центру ленты. Ширина раскрыва направляющих 5 регулируется и устаНавливается равной раскрыву схвата 2. Деталь 4, достигая задней стенки схвата 2, под действием сил трения начинает разворачиваться и занимает одно из устойчивых положений. В исходном состоянии схват 2 находится в центе ленты 3 и примыкает к нему. При попадании детали 4 в зону действия блока фотодатчиков 1 на выходе нуль-органа 8 появляется сигнал Единица, который подается на перв вход элемента И 9, Импульсы с выхода генератора 10 начинают поступать на счетный вход счетчика 11 импульсов. Коэффициент счета счетчика 11 выбирается из условия обеспечения задержки, необходимой для того, чтобы де- таль 4 в схвате 2 успела принять одно из фиксированных положений. После переполнения счетчика 11 на первый вход первого коммутатора 7 подается Единица. G первого выхода первого коммутатора 7 сигнал поступает на первый вход блока 13 управления, с выхода которого подается сигнал на сжатие схвата 2. Для достижения определенного усилия сжатия один из пальцев схвата 2 снабжен датчиком 14 усилия (на второ пальце усилие такое же). Сигнал от датчика 14 усилия подается на пороговый элеменЧ 15, на выходе которого появляется сигнал Единица лишь после достижения заданного усилия сжатия схвата 2. С выхода порогового элемента 15 сигнал поступает на; второй коммутатор 12, который отключает нуль-орган 8 от блока 1 фотодатчиков. Импульсы с генератора перестают поступать на
счетный вход счетчика 11. Этим же сигналом.с порогового элемента 15 об.нуляется счетчик 11 и через второй вход логического блока 6 на третий и четвертый входы первого коммутатора 7 подается сигнал. По этому сигналу первый коммутатор 7 вырабатывает сигналы, которые поступают на входы блока 13 управления. На выходе блока 13 управления появляется сигнал
0прекращении сжатия схвата 2 и о перемещениях по вертикали и горизонтали k ротации схвата 2. По этому
же сигналу с порогового элемента 15 производится считывание кода с блока
1фотодатчиков. Считанный код через первый вход логического блока 6 поступает на первый вход блока 18 сравнения. С выхода блока 17 памяти через
третий вход логического блока 6 на второй вход блока 18 сравнения поступают коды, записанные в блоке 17 памяти на этапе обучения. При равенстве кодов на выходе блока 18 сравнения появляется сигнал, по которому из блока 17 памяти считываются значения угла ротации и горизонтального перемещения схвата 2, которые через третий, четвертый и пятый выходы логического блока 6, первый коммутатор 7 и блок 13 управления поступают на приводы 19 манипулятора. .
Применение изобретения позволяет значительно расширить функциональные возможности робота - манипулятора технологического конвейера за счет увеличения номенклатуры манипулируемых деталей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивным роботом | 1983 |
|
SU1130829A1 |
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU477394A1 |
| Устройство для определения центров круглых предметов | 1983 |
|
SU1095135A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для управления робототизированным комплексом | 1985 |
|
SU1278203A1 |
| Устройство для управления адаптивным роботом | 1981 |
|
SU1004972A1 |
| Устройство для управления адаптив-НыХ РОбОТОМ | 1979 |
|
SU834667A1 |
| Устройство для автоматической ориентации деталей | 1982 |
|
SU1147549A1 |
| Устройство определения центров круглых предметов для систем управления роботом-манипулятором технологического конвейера | 1973 |
|
SU455322A1 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1140093A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РОБОТОМ ТЕХНОЯОПИЕСКОГО КОНВЕЙЕРА, содержащее последовательно соединенные пульт управлений, блок памяти, логический блок, первый коммутатор, блоки управления и приводы исполни-, тельного органа робота, а. также блок 13 5 fjrv. фотодатчиков, подключенный к второму входу логического блока, и генератор тактовых импульсов, соединенный выходом с первым входом элемента И, отличающееся тем, что, с целью расширения его функциональных возможностей, оно содержит блок сравнения, счетчик и последовательно соединенные датчик усилия схвата, пороговый элейент, второй коммутатор и нуль-орган, выход которого подключен к второму входу элемента И, соединенного выходом с первым входом счетчика, второй вход которого подключен -к выходу порогового элемента и третьему входу логического блока, а выход - к второму входу первого коммутатора, вторые выходы логического блока соединены с входами блока сравнения, выход которого подключен к второму входу блока памяти, причем второй вход второго коммутатора соединен с выходом блока фотодатчиков.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Катыс Г.П | |||
| Оптические информационные системы роботов-манипуляторов | |||
| М., Машиностроение, 1977, с | |||
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
