Изобретение относится к машиностроению, в частности к устройствам для выполнения вспомогательных операций, связанных с изменением положения деталей в пространстве и их ориентацией, а именно к захватам манипуляторов.
Известен схват, содержащий губки, связанные с приводом, и кольца, смонтированные в пазах, выполненных на внутренней поверхности губок 1.
Недостатком такого схвата является невозможность захвата вала, произвольным образом расположенного в пространстве, т. е. не попадающего в зону схвата.
По основному авт. св. № 1007970 известно устройство для захвата неориентированных деталей типа валов, содержащее корпус, приводы и захв.атнЫй орган, имеющий три зажимных элемента, каждый из которых связан с приводом, а зажимные элементы захватного органа выполнены в виде колец равного диаметра, расположенных в параллельных плоскостях, причем центры колец расположены на окружности, диаметр которой не менее диаметра кольца 2.
Однако в известном устройстве захват деталей осуществляется с помощью трех колец равного диаметра, поворачивающихся в параллельных плоскостях, каждое кольцо имеет некоторую толщину, а кольца расположены одно над другим, поэтому и точки касания колец - зажимных элементов с цилиндрической поверхностью детали находятся в различных параллельных плоскостях в которых двигаются эти кольца. Условная плоскость, проведенная через эти точки касания, при каждом новом захвате Занимает в пространстве положение, отличное от предыдущего. Величина угла наклона условной плоскости, проведенной через точки касания, зависит от толщины колец зажимных элементов, а направление наклона зависит от того , в каком месте внутри кольца окажется деталь в момент первого соприкосновения с одним из трех колец, что не позволяет обеспечить ориентированное положение детали. Это обусловлено сложностью конструкции устройства.
Цель изобретения - упрощение конструкции устройства.
Указанная цель достигается тем, что в устройстве для захвата неориентированных деталей типа валов, содержащем корпус приводы и захватный орган, имеющий три зажимных элемента, каждый из которых связан с приводом, а зажимные элементы захватного органа выполнены в виде колец равного диаметра, расположенных в параллельных плоскостях, причем центры колец расположены -на окружности, диаметр которой не менее диаметра кольца, два кольца захватного органа установлены соосно и жестки одно относительно другого на расстоянии, обеспечивающем перемещение между ними третьего кольца, при этом два указанных кольца соединены с одним приводом, а третье - с другим приводом.
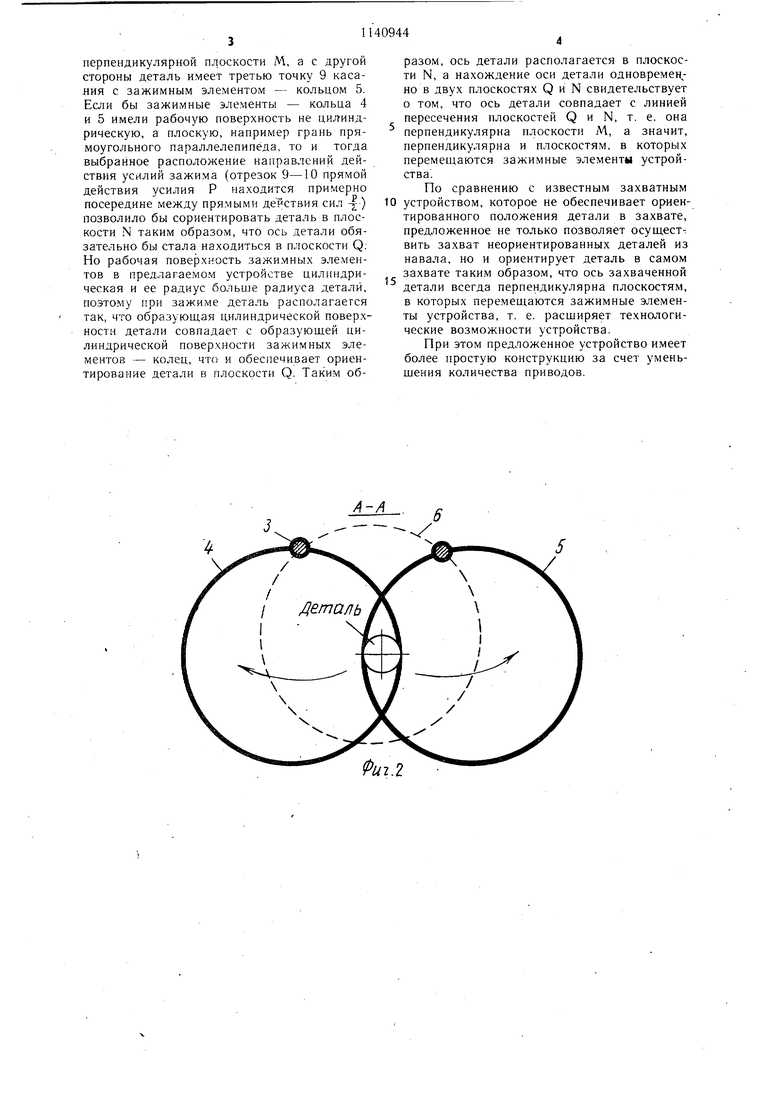
На фиг. 1 изображено предлагаемое устройство для захвата неориентированных деталей типа валов, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг..3- схема захвата и ориентации детали.
Устройство содержит корпус 1, установленные в нем приводы 2 вращения и захватный орган 3, который имеет три зажимных элемента, выполненных в виде колец. Два кольца 4 захватного органа установлены соосно и жестко одно относительно другого на расстоянии, обеспечивающем перемеще5 ние между ними третьего кольца 5, при этом два указанных кольца 4 соединены с одним приводом, а третье - с другим приводом. Устройство работает следующим образом. При опускании устройства на неориентированные детали оно опирается зажимными
0 элементами - кольцами 4 и 5, на поверхность деталей, при этом внутри зажимных элементов - колец 4 и 5 оказывается часть общей поверхности деталей. При хаотическом расположении деталей в любом ограниченном участке поверхности можно найти деталь, которая выступает из общего уровня выше соседних деталей. Включаются приводы 2 вращения, которые передают момент на зажимные элементы - кольца 4 и 5 и раздвигают их одно относительно другого
0 в горизонтальной плоскости до выравнивания моментов вращения до заданной величины. При этом осуществляется зажим детали, а усилия зажима на зажимных элементах - кольцах 4 и кольце 5 одинаковы. Затем происходит перенос детали манипулятором (не показан) в предназначенное место. Для ее. освобождения включается в противоположном направлении привод, деталь освобождается, кольца 4 и 5 занимают исходное положение, обозначенное на
0 фиг. 2 пунктирной линией 6. Устройство готово к следующей операции.
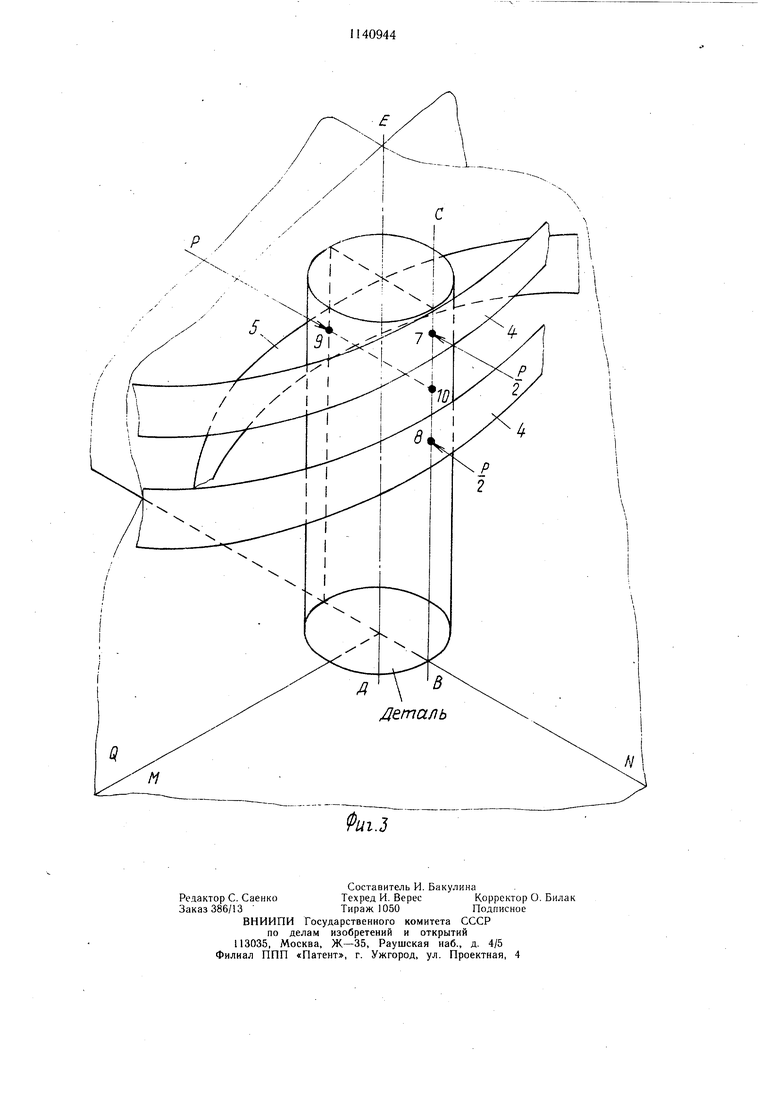
Ориентация деталей в предлагаемом устройстве осуществляется следующим образом (фиг. 3).
Зажимные элементы - кольца 4 и 5 ие ремещаются параллельно плоскости .М., а две плоскости, перпендикулярные ей и перпендикулярные между собой, Q и N соответственно проведены так, что их линия пересечения DE совпадает с осью захваченной
0 и сориентированной детали, а в одной плоскости, например N, действуют усилия зажима на зажимных элементах (на зажимном элементе - кольце 5 - усилие Р, а на зажимном элементе - кольце 4 - два усилия -). Захват детали устройством осуществляется так, что с одной стороны деталь имеет две точки 7 и 8 касания с зажимным элементом - кольцами 4, при этом обе точки лежат на некоторой линии ВС,
перпендикулярной плоскости М, а с другой стороны деталь имеет третью точку 9 касания с зажимным элементом - кольцом 5. Если бы зажимные элементы - кольца 4 и 5 имели рабочую поверхность не цилиндрическую, а плоскую, например грань прямоугольного параллелепипеда, то и тогда выбранное расположение направлений действия усилий зажима (отрезок 9-10 прямой действия усилия Р находится примерно посередине между прямыми действия сил -|) позволило бы сориентировать деталь в плоскости N таким образом, что ось детали обязательно бы стала находиться в плоскости Q. Но рабочая поверхность зажимных элементов в предлагаемом устройстве цилиндрическая и ее радиус больше радиуса детали, поэтому при зажиме деталь располагается так, что образуюш,ая цилиндрической поверхности детали совпадает с образующей цилиндрической поверхности зажимных элементов - колец, что и обеспечивает ориентирование детали в плоскости Q. Таким образом, ось детали располагается в плоскости N, а нахождение оси детали одновремен но в двух плоскостях Q и N свидетельствует о том, что ось детали совпадает с линией пересечения плоскостей Q и N, т. е. она перпендикулярна плоскости М, а значит, перпендикулярна и плоскостям, в которых перемещаются зажимные элементы устройства.
По сравнению с известным захватным устройством, которое не обеспечивает ориентированного положения детали в захвате, предложенное не только позволяет осущестг вить захват неориентированных деталей из навала, но и ориентирует деталь в самом захвате таким образом, что ось захваченной детали всегда перпендикулярна плоскостям, в которых перемещаются зажимные элементы устройства, т. е. расширяет технологические возможности устройства.
При этом предложенное устройство имеет более простую конструкцию за счет уменьшения количества приводов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1983 |
|
SU1220788A1 |
| Захватное устройство | 1984 |
|
SU1266735A1 |
| Захватное устройство | 1982 |
|
SU1013264A1 |
| Устройство для захвата неориентированных деталей типа валов | 1981 |
|
SU1007970A1 |
| Захватное устройство | 1985 |
|
SU1289680A1 |
| Захват для неориентированных деталей типа валов | 1983 |
|
SU1135640A1 |
| Захватное устройство | 1984 |
|
SU1212781A1 |
| Захватное устройство | 1987 |
|
SU1426784A1 |
| Захватное устройство | 1981 |
|
SU971647A1 |
| Захватное устройство | 1987 |
|
SU1498610A1 |
УСТРОЙСТВО ДЛЯ ЗАХВАТА НЕОРИЕНТИРОВАННЫХ ДЕТАЛЕЙ ТИПА ВАЛОВ по авт. св. № 1007970, отличающееся тем, что, с целью упрощения его конструкции, два кольца захватного органа установлены соосно и жестко одно относительно другого на расстоянии, обеспечивающем перемещение между ними третьего кольца, при этом два указанных кольца соединены с одним приводом, а третье - с другим приводом. § СО 4 4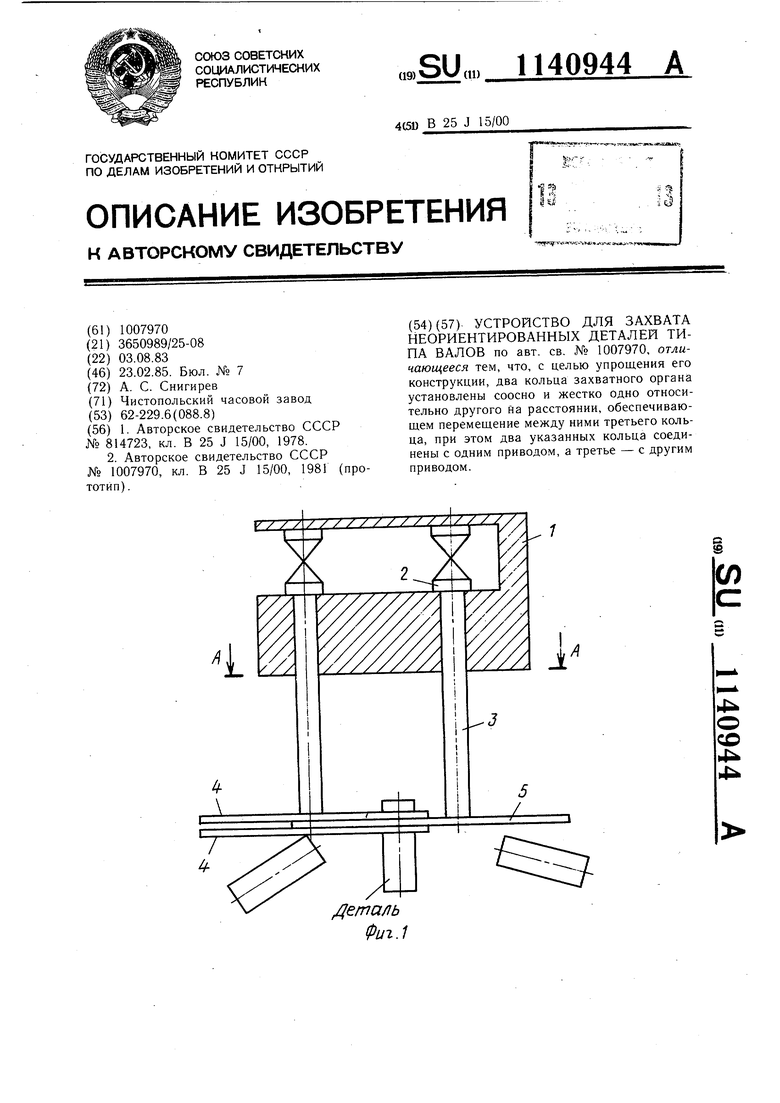
4
-А
5
Фиг.г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Схват | 1978 |
|
SU814723A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для захвата неориентированных деталей типа валов | 1981 |
|
SU1007970A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
