1
Изобретение относится к робототехнике, в частности к захватным устройствам манипуляторов.
Целью изобретения является повышение надежности захвата за счет обеспечения проникновения зажимных губок в узкие щели между деталями, типа ступенчатых валов.
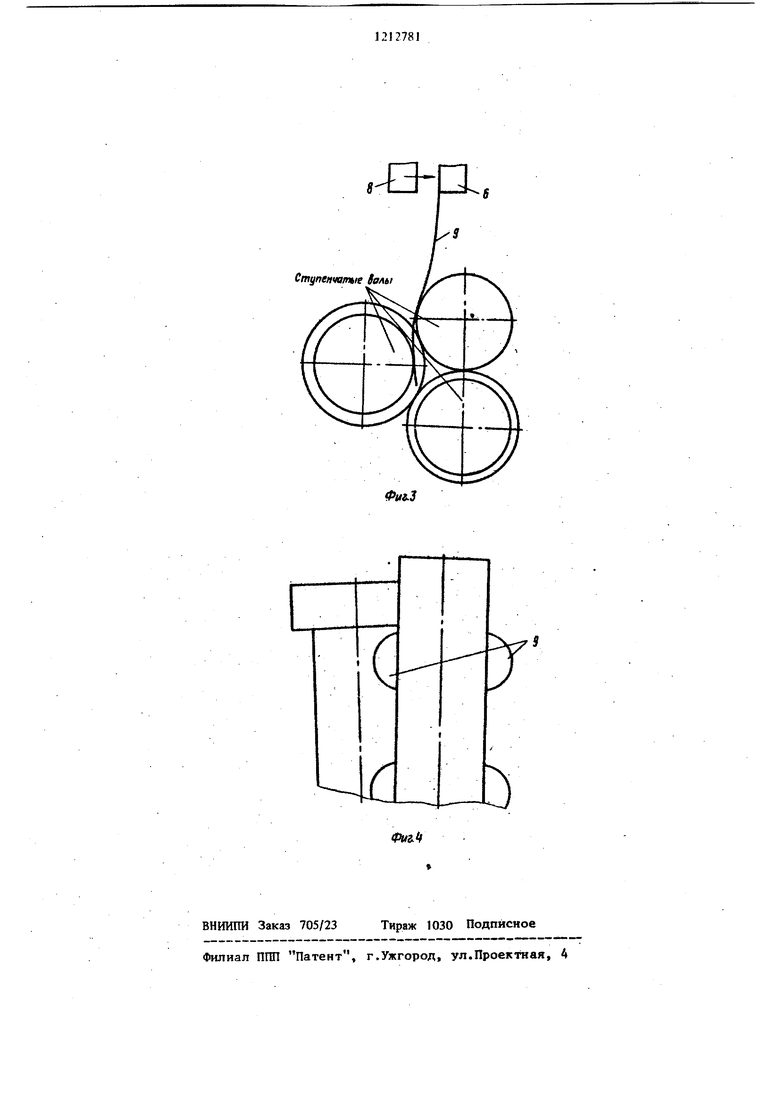
На фиг. 1 изображено захватное устройство, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - положение зажимной губки при проникновении ее .между ступенчатыми валами; на фиг. 4 положение зажимных губок при зажиме ступенчатого вала.
Захватное устройство состоит из корпуса 1, в котором выполнены направляющие, например, типа ласточкин хвосток, перпендикулярные оси захватного устройства и цапфы, ось которой совпадает с осью захватного устройства. При помощи цапфы захватное устройство устанавливается в корпусе руки манипулятора с возможностью вращения.
Каждая зажимная губка выполнена в виде каретки 2, установленной в направляющих корпуса 1, и снабжена индивидуальным приЬодом 3 ее перемещения, например силовым цилиндром. Каждая каретка 2 имеет форму стакана и образует с направляющей корпуса подвижную кинематическую пару. Корпус силового цилиндра 3 жестко связан с корпусом 1, а шток силового цилиндра 3 жестко закреплен на каретке 2. В стакане 2 с возможностью вращения в под- щипниках 4 установлена ось 5. Ось 5 жестко связана с корпусом силового цилиндра 6. На пгтоке 7 силового цилиндра 6 установлена профилированная колодка 8. Причем на корпусе силового цилиндра 6 выполнена
127812
опорная поверхность, идентичная профилированной поверхности профилированной колодки 8. На корпусе силового цилиндра 6 между упомянутыми профилиро ванными поверхностями за5 креплена плоская упругая лента 9.
Устройство работает следующим образом. При подводе захватного устройства к массе неориентированных деталей, типа ступенчатых валов, каретки 2 находятся в наибо10 лее удаленном от оси захватного устройства положений, а профилированная колодка 8 удалена от корпуса силового цилиндра 6, причем плоская упругая лента 9 находится в исходном положении. При касании торцом
15 зажимной губки поверхности детали зажимная губка поворачивается под действием реакции со стороны деталей до тех пор, пока направление плоскости ее действия не совпадает с направлением щели между де20 талями. При дальнейщем ходе захватного устройства зажимная губка проникает в щель между деталями. При окончании подвода захватного устройства, когда зажимные губки проникнут в массу неориентированных
25 деталей, включаются силовые цилиндры 6. Профилированная колодка 8 и корпус силового цилиндра 6 изгибают упругую ленту 9, предавая ей форму полуцилиндра. Поперечная жесткость плоской упругой ленты 9 рездд ко взрастет, затем включаются силовые цилиндры 3.
Осуществляется зажим детали или группы деталей. Захваченная деталь (детали) переносятся рукой манипулятора (не показан) в Предназначенное место. Для освобождения детали реверсируются силовые цилиндры 3 и 6. Плоская упругая лента 9 принимает исходное положение за счет собственной жесткости. Захват готов к работе.
35
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1984 |
|
SU1197835A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Захватное устройство | 1984 |
|
SU1237423A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| Захватное устройство | 1985 |
|
SU1289680A1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |

Фиг2
Стдпенчате toAti
| Захватное устройство | 1982 |
|
SU1013264A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
