4 Ю
о:) -ч
00
фие. 2
ИзпГфетение относится к машиностроению, а именно к захвлтиым устройствам и держателям деталей, и может быть использовано в автоматизированных технологических линиях на оборудовании, вынолняющем вспомогательные операции очистки и протирки, а также операции отделки и полировки поверхностей у изделий, имеюпшх резьбу.
Цель изобретения - повышение надежности зажима деталей, имеющих резьбовун) поверхность.
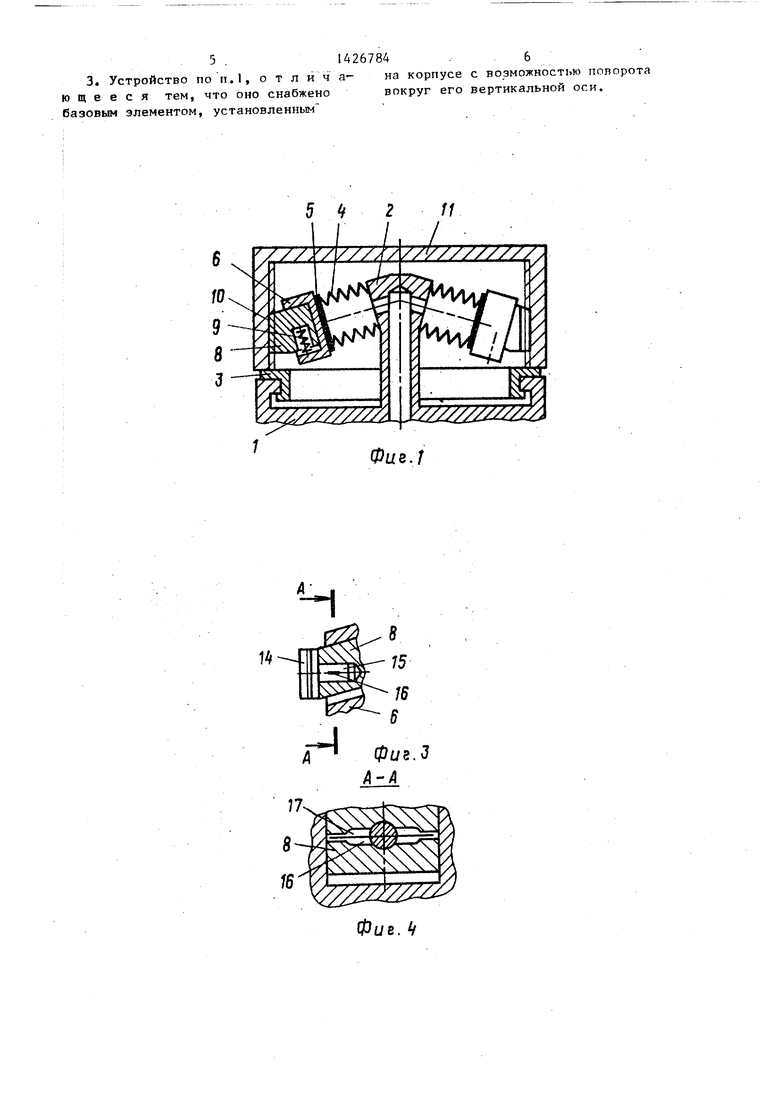
На фиг.1 изображено захватное устройство в рабочем положении с за- жатой деталью; на фиг.2 - пример выполнения захватного устройства для зажима де.талей за отверстие малого диаметра; на фиг.З - пример выполнения губки; на фиг.4 - разрез Л-А на фиг.З; на фиг.З и 6 - схемы взаимодействия губки с резьбовой зависимостью детали.
Захватное устройство содержит кор- ггус 1 с герметичным коллектором 2 для подвода знерт оносителя и базовым элементом 3, а также упругую приводную систему, выполненную в виде силь фонов А, у каждого из которых один конец соединен с коллектором 2, а другой герметизирован заглушкой 5.
Иа заглушках 5 закреплены зажимные рычаги 6, имеющие возможность радиального перемещения от 1осительно вертикальной оси устройства под деист-
иием приводной системы. В проточках 7, выполненных на зажимных рычагах, с возможностью перемещения в плоское- ти, перпендикулярной оси сильфона, установлены зажимные губки 8, подпружиненные пружинами 9, удерживающими их в верхнем положении.
Рабочая часть 10 зажимной губки параллельна оси захватного устройства и выполнена в виде резьбовой поверхности, соответствующей по профилю и шагу резьбе захватываемой детали 11.
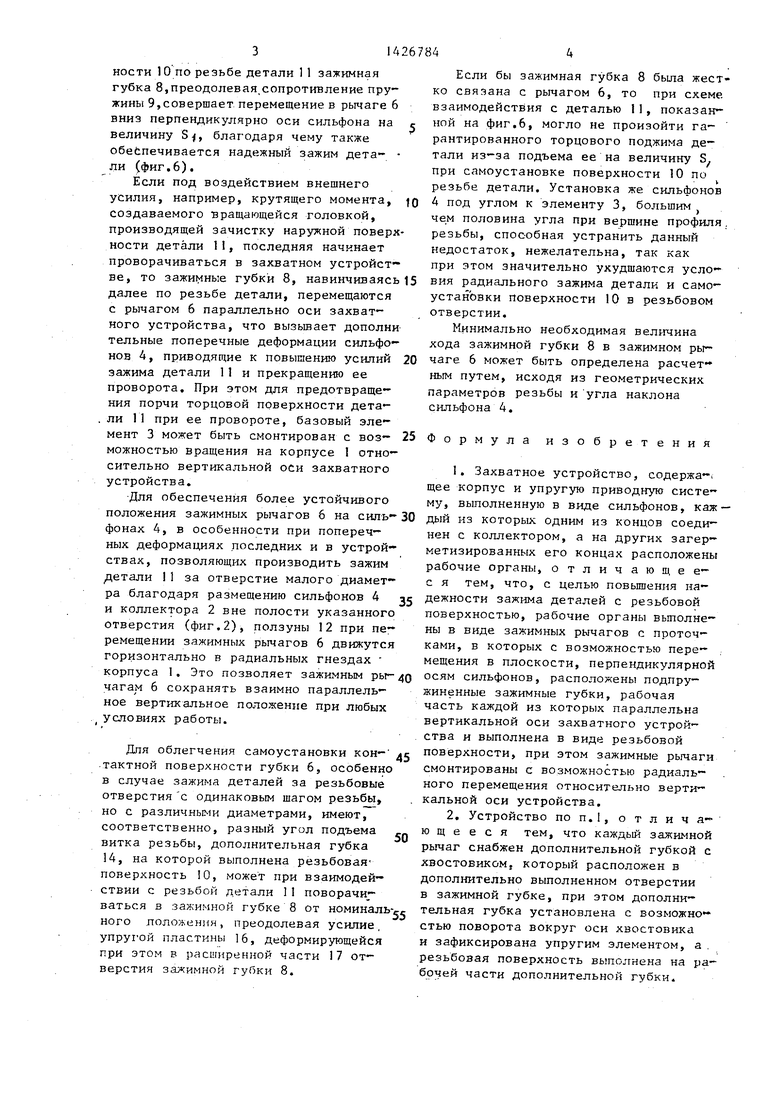
Сильфоны 4 установлены с наклоном в сторону базового элемента 3, который закреплен на корпусе с возможностью вращения вокруг вертикальной оси устройства. В захватном устройстве (фиг.2) для обеспечения возможности захвата детали за отверстие малого диаметра каждый зажимной рычаг соединен с ползуном 12, имеющим возмож- , ность радиального перемещения в корпусе 1. При этом заглушка 5 сильфона
4 соединена с р(,1чагом 6 сквозь окно 13, предусмотренное в ползуне 12.
На зажимной губке 8 (фиг.З) установлена дополнительная губка 14 с хвостовиком 15, который расположен в дополнительно выполненном отверстии в губке 8. Дополнительная губка 14 имеет возможность вращения вокруг оси хвостовика 15 и зафиксирована упругой пластиной 16, размещенной в отверстии хвостовика и в дополнительном отверстии в губке, имеющем распгиренную часть 17. Резьбовая поверхность при зтом выполнена на рабочей части дополнительной губки.
Захватное устройство работает следующим образом.
На загрузочно-разгрузочной позиции коллектор 2 соединен с атмосферой. Сильфоны 4 находятся В первоначальном недеформированном состоянии. Зажимные рычаги 6 с губками 8 радиаль- но сведены к вертикальной оси. захватного устройства, что позволяет свободно устанавливать и снимать детали
с базового элемента 3.
/.
I Для зажима детали 11 энергоноси
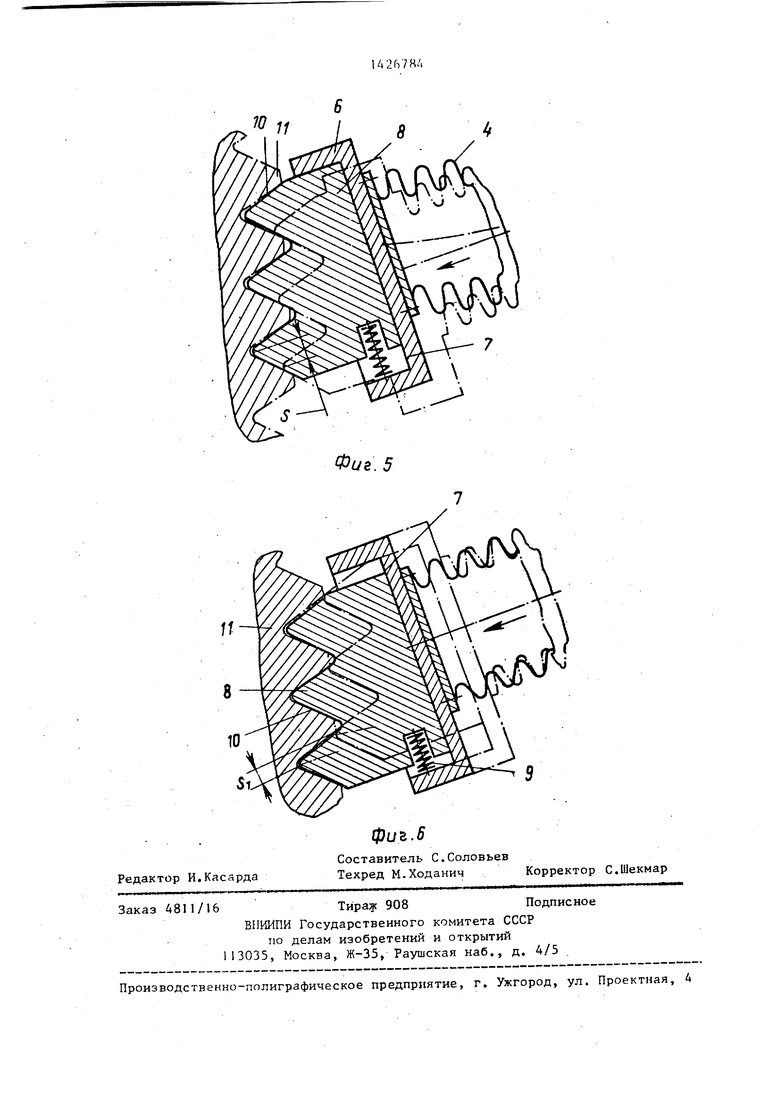
тель, например сжатый воздух, подается через коллектор 2 в сильфоны 4, которые, деформируясь, удлиняются, и зажимные рычаги 6, раздвигаясь, резьбовыми поверхностями 10 зажимных губок 8 вступают в контакт с резьбовой поверхностью осевого отверстия детали 11..
В случае, если выступы резьбы губки 8 вступают в контакт с нижней стенкой впадины резьбовой поверхности отверстия детали 11 (фиг.З), то в ходе продолжающегося удлинения сильфона, губка 8 самоустанавливается резьбовой поверхностью 10 в резьбе детали 11, совершая при этом перемещение совместно с рычагом 6 вверх перпендикулярно оси сильфона 4 на величину S относительно своего положения в момент начала контакта с резьбой детали II, сопровождаемое поперечной деформацией сильфона 4.
За счет наклонного положения сильфонов и их деформаций обеспечивается надежный радиальный зажим детали 11 по резьбовому отверстию. Если же выступы-резьбы поверхности 0 при раздвижении рычагов 6 касаются верхней стенки впадины или поверхности выступов резьбы детали 1 1 , то Г1)и исследующей самоустановке контактной понерх-
ности 10 по резьбе детали 1 1 зажимная губка 8,преодолевая,сопротивление пружины 9,совершает перемещение в рычаге 6 вниз перпендикулярно оси сильфона на величину S, благодаря чему также обеЬпечивается надежный зажим дета- ли (фиг.6).
Если под воздействием внешнего усилия, например, крутящего момента, создаваемого вращающейся головкой, производящей зачистку наружной поверхности детали 11, последняя начинает проворачиваться в захватном устройст
67844
Если бы зажимная губка 8 была жестко связана с рычагом 6, то при схеме взаимодействия с деталью I1, показан-
с ной на фиг.6, могло не произойти гарантированного торцового поджима детали из-за подъема ее на величину S при самоустановке поверхности 10 по резьбе детали. Установка же сильфонов
10 под углом к элементу 3, большим
чем половина угла при вершине профиля, резьбы, способная устранить данный недостаток, нежелательна, так как при этом значительно ухудшаются уело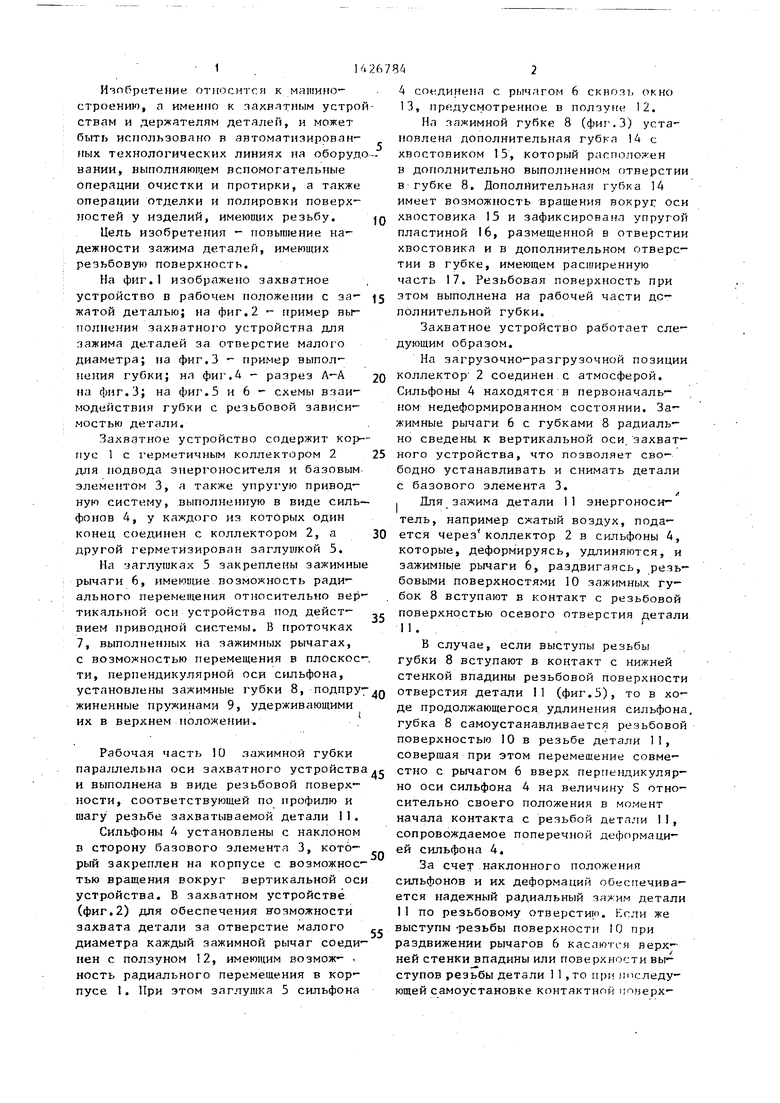
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1986 |
|
SU1397280A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Самостопорящийся болт | 1986 |
|
SU1344970A1 |
| Захватное устройство | 1987 |
|
SU1504092A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ЗАЖИМ | 1990 |
|
RU2016751C1 |
| Групповой схват | 1985 |
|
SU1311926A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| САМОЦЕНТРИРУЮЩЕЕ ЗАЖИМНОЕ УСТРОЙСТВО | 1994 |
|
RU2088396C1 |
| Устройство для соединения ступицы с концом вала | 1986 |
|
SU1368510A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
Изобретение относится к захватным устройствам. Цель изобретения - повы шение надежности зажима деталей, име- Ю1ЦИХ резьбовую поверхность. Устройство имеет корпус 1 с базовым элементом, герметичный коллектор 2 для подвода, энергоносителя и упругую приводную систему в виде сильфонов 4, на загерметизированных концах которого закреплены зажимные рычаги 6 с установленными на них подпружиненными рабочими губками 8. При подаче энергоносителя сильфоны удлиняются и зажимные рычаги 6, раздвигаясь, резьбовыми поверхностями, выполненными на рабочей час-- ти зажимных губок, вступают в контакт с резьбовой поверхностью детали. При этом наличие подпружиненных г убок и наклонное положение сильфонов относительно базового элемента обеспечивают .надежный радиальный зажим детали. Зажимные рычаги 6 для повышетшя устойчивости могут быть соединены с ползунами 12, имеющими возможность радиального перемещения в корпусе 1. Возможно применение дополнительных губок, установленных на зажимных губках с помощью хвостовика, зафиксированного упругим элементом и обеспечивающего возможность вращения дополнительной губки, для облегчения ее са- моустановки по резьбе захватываемой детали. 2 з.п. ф-лы, б ил. (О (Л
ве, то зажимные губки 8, навинчиваясь 15 вия радиального зажима детали и само-
далее по резьбе детали, перемещаются с рычагом 6 параллельно оси захватного устройства, что вызьгоает дополни тельные поперечные деформации сильфо20
Минимально необходимая вел1-гчина хода зажимной губки 8 в зажимном рычаге 6 может быть определена расчет ньгм путем, исходя из геометрических параметров резьбы и угла наклона сильфона 4.
нов 4, приводящие к повытениго усилий зажима детали 11 и прекращению ее проворота. При этом для предотвращения порчи торцовой поверхности детали 11 при ее провороте, базовый элемент 3 может быть смонтирован с воз- 25 Формула изобретения можностью вращения на корпусе 1 относительно вертикальной оси захватного устройства.
Для обеспечения более устойчивого
положения зажимных рычагов 6 на силь- 30 дый из которых одним из концов соединен с коллектором, а на других загерметизированных его концах расположены рабочие органы, отличающее- с я тем, что, с целью повьщтения надежности зажима деталей с резьбовой поверхностью, рабочие органы вьтолне- ны в виде зажимных рычагов с проточками, в которых с возможностью перемещения в плоскости, перпендикулярной
фонах 4, в особенности при поперечных деформациях последних и в устройствах, позволяющих производить зажим етали I 1 за отверстие малого диаметра благодаря размещению сильфонов 4 5 и коллектора 2 вне полости указанного отверстия (фиг.2), ползуны 12 при перемещении зажимных рычагов 6 движутся горизонтально в радиальных гнездах корпуса 1, Это позволяет зажимным ры-дО осям сильфонов, расположены подпру- чагам 6 сохранять взаимно параллель- жиненные зажимные губки, рабочая ное вертикальное положение при любых часть каждой из которых параллельна условиях работы.вертикальной оси захватного устройства и выполнена в виде резьбовой
Для облегчения самоустановки кон- А поверхности, при этом зажимные рычаги тактной поверхности губки 6, особенно в случае зажима деталей за резьбовые отверстия с одинаковым шагом резьбы, но с различными диаметрами, имеют, соответственно, разный угол подъема витка резьбы, дополнительная губка 14, на которой выполнена резьбовая- поверхность 10, может при взаимодей- - ствии с резьбой детали II поворачи-
50
смонтированы с возможностью радиального перемещения относительно вертикальной оси устройства.
2, Устройство по П.1, о т л и ч а- ю щ е е с я тем, что каждый зажимной
рычаг снабжен дополнительной губкой с хвостовиком, который расположен в дополнительно выполненном отверстии в зажимной губке, при этом дополнительная губка установлена с возможно стью поворота вокруг оси хвостовика и зафиксирована упругим элементом, а , резьбовая поверхность выполнена на ра- брчей части дополнительной губки.
ваться в зажимной губке 8 от номиналь-.
ного лоложения, преодолевая усилие, упругой пластины 16, деформирующейся при этом в расширенной части 17 отверстия зажимной губки 8.
установки поверхности 10 в резьбовом отверстии.
Минимально необходимая вел1-гчина хода зажимной губки 8 в зажимном рычаге 6 может быть определена расчет ньгм путем, исходя из геометрических параметров резьбы и угла наклона сильфона 4.
Формула изобретения
Формула изобретения
дый из которых одним из концов соединен с коллектором, а на других загерметизированных его концах расположены рабочие органы, отличающее- с я тем, что, с целью повьщтения надежности зажима деталей с резьбовой поверхностью, рабочие органы вьтолне- ны в виде зажимных рычагов с проточками, в которых с возможностью перемещения в плоскости, перпендикулярной
осям сильфонов, расположены подпру- жиненные зажимные губки, рабочая часть каждой из которых параллельна вертикальной оси захватного устройповерхности, при этом зажимные рычаги
смонтированы с возможностью радиального перемещения относительно вертикальной оси устройства.
2, Устройство по П.1, о т л и ч а- ю щ е е с я тем, что каждый зажимной
рычаг снабжен дополнительной губкой с хвостовиком, который расположен в дополнительно выполненном отверстии в зажимной губке, при этом дополнительная губка установлена с возможно стью поворота вокруг оси хвостовика и зафиксирована упругим элементом, а , резьбовая поверхность выполнена на ра- брчей части дополнительной губки.
Фив.Г
Фие.
Фи. 5
| Захват промышленного робота | 1984 |
|
SU1192971A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
