Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов.
Цель изобретения - повышение надежности работы захватного устройства путем обеспечения зажимным губкам равной жесткости в направлении, перпендикулярном оси зажимной губки.
На чертеже схематически изображено захватное устройство при захвате детали, продольный разрез; зажимные губки, не понадающие в полость сечения, условно не показаны.
Захватное устройство состоит из корпуса 1, в котором выполнены направляющие, например типа «ласточкин хвост, по которым могут перемещаться каретки 2 с расположенными в них зажимными губками. Каждая каретка снабжена индивидуальным приводом 3 перемещения кареток, например в виде силового цилиндра, корпус которого жестко связан с корпусом 1, при этом шток силового цилиндра жестко закреплен на каретке 2. Каждая зажимная губка выполнена в виде закрепленной в каретке 2 конической спирали 4, внутри которой соосно расположена цилиндрическая пружина 5 растяжения. Пружина 5 закреплена на расположенном в каретке 2 приводе 6 вращения. Крайними витками коническая спираль 4 и пружина 5 соединены между собой.
Захватное устройство работает следующим образом.
При подводе устройства к неориентированной детали или детали сложной формы зажимные губки копируют форму детали. При этом конические спирали 4 сжимаются вдоль оси или изгибаются при уравновешивании (для деформации конических спиралей 4 вдоль оси нужно минимальное усилие). По окончании подвода захватного устройст
ва к детали включаются приводы 6, раскручивающие конические спирали 4 до касания плоскостей витков спирали друг с другом. При этом жесткость зажимных губок резко возрастает до глухой заделки витков между собой. Включаются индивидуальные приводы 3 перемещения кареток, и зажимные губки фиксируют деталь, как показано на чертеже.
Далее деталь переносится манипулятором в предназначенное место. Для освобождения детали приводы 3 и 6 реверсируются. Деталь под действием собственного веса выпадает из захватного устройства.
При этом, если сначала реверсировать приводы 6, освобождая коническую спираль 4, а далее реверсировать индивидуальнью приводы 3 зажи.ма, то деталь будет выталкиваться из захватного устройства под действием сжатия (деформации при схвате детали) конической спирали 4. После освобождения детали захватное устройство готово к следующей операции.
Формула изобретения
Захватное устройство, содержащее корпус, в направляющих которого установлены с возможностью перемещения от индивидуальных приводов каретки с расположенными в них зажимными губками, отличающееся тем, что, с целью повышения надежности работы, каждая зажимная губка выполнена в виде закрепленной на каретке конической спирали, внутри которой соосно расположена цилиндрическая пружина растяжения, закрепленная на расположенно.м
в каретке дополнительно введенном приводе вращения, при этом коническая спираль и цилиндрическая пружина растяжения соединены между собой крайними витками.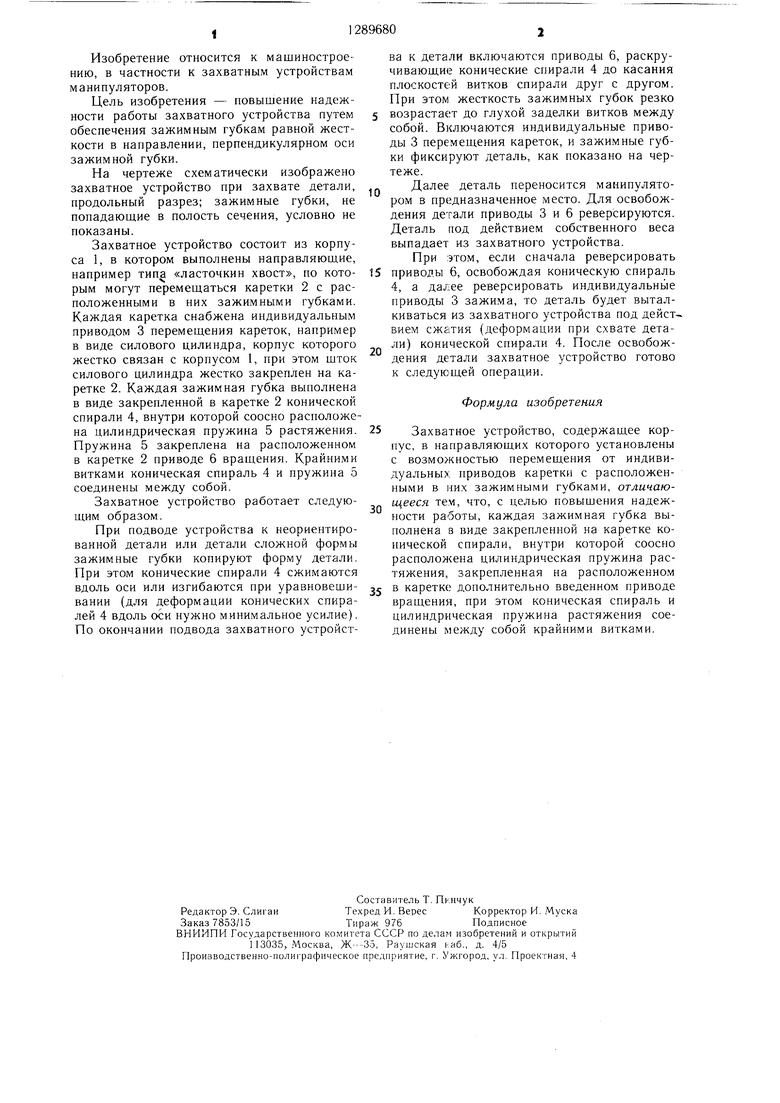
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1984 |
|
SU1212781A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2022775C1 |
| Захватное устройство | 1982 |
|
SU1013264A1 |
| Захватное устройство | 1983 |
|
SU1220788A1 |
| Устройство для растяжения проволочной спирали | 1981 |
|
SU1000146A1 |
| Захватное устройство | 1989 |
|
SU1708605A2 |
| Схват | 1980 |
|
SU1046085A1 |
| Захват манипулятора | 1978 |
|
SU722758A1 |
| Захватное устройство | 1984 |
|
SU1266735A1 |
| Устройство для захвата неориентированных деталей типа валов | 1983 |
|
SU1140944A2 |
Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов, может быть использовано для захвата неориентированных деталей различной формы и размеров и позволяет повысить надежность за счет обеспечения равной жесткости зажимных губок в направлении, перпендикулярном оси зажимной губки. Конические спирали 4 и цилиндрические пружины 5 растяжения зажимных губок сжимаются или изгибаются. Жесткость зажимных губок увеличивается за счет раскручивания конической спирали 4 приводом 6 вращения, что обеспечивает зажимным губкам равную жесткость в любом направлении. Окончательный зажим детали осуществляется перемещением кареток по направляющим корпуса 1 от привода 3. 1 ил. -,-I / //тс/ / aHtj/-7Lf ffrr7C /: a (Л 00 ;о 05 00
| Захватное устройство | 1984 |
|
SU1212781A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
