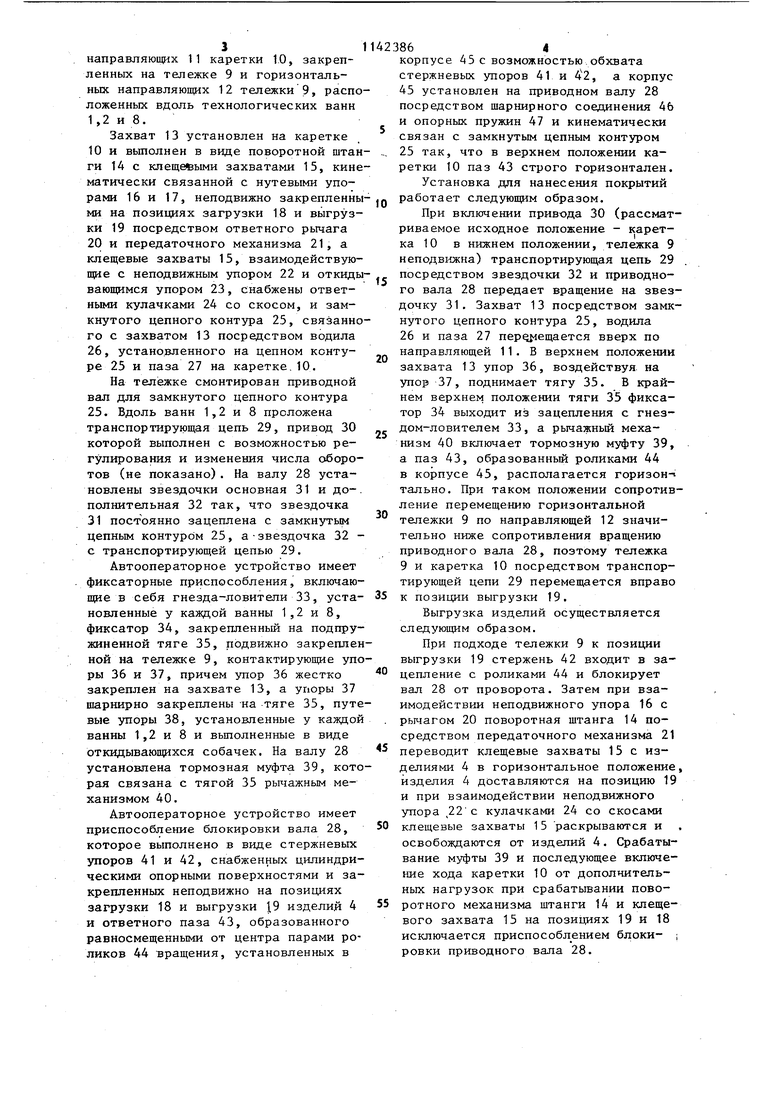
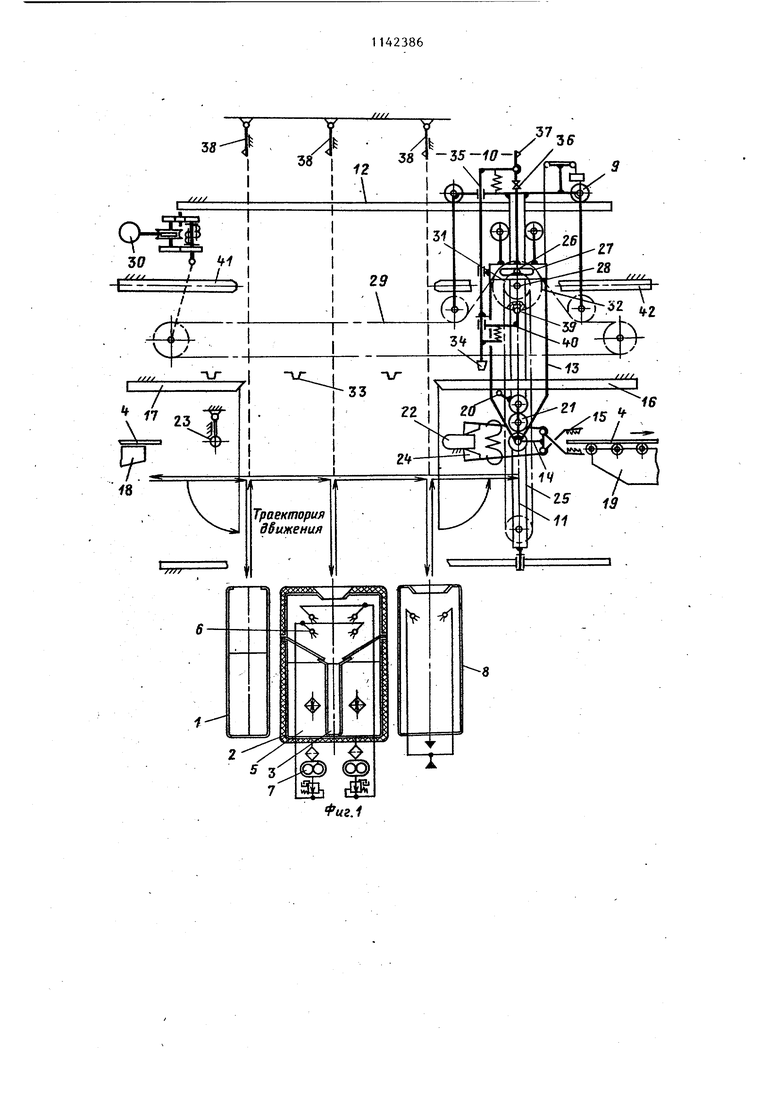
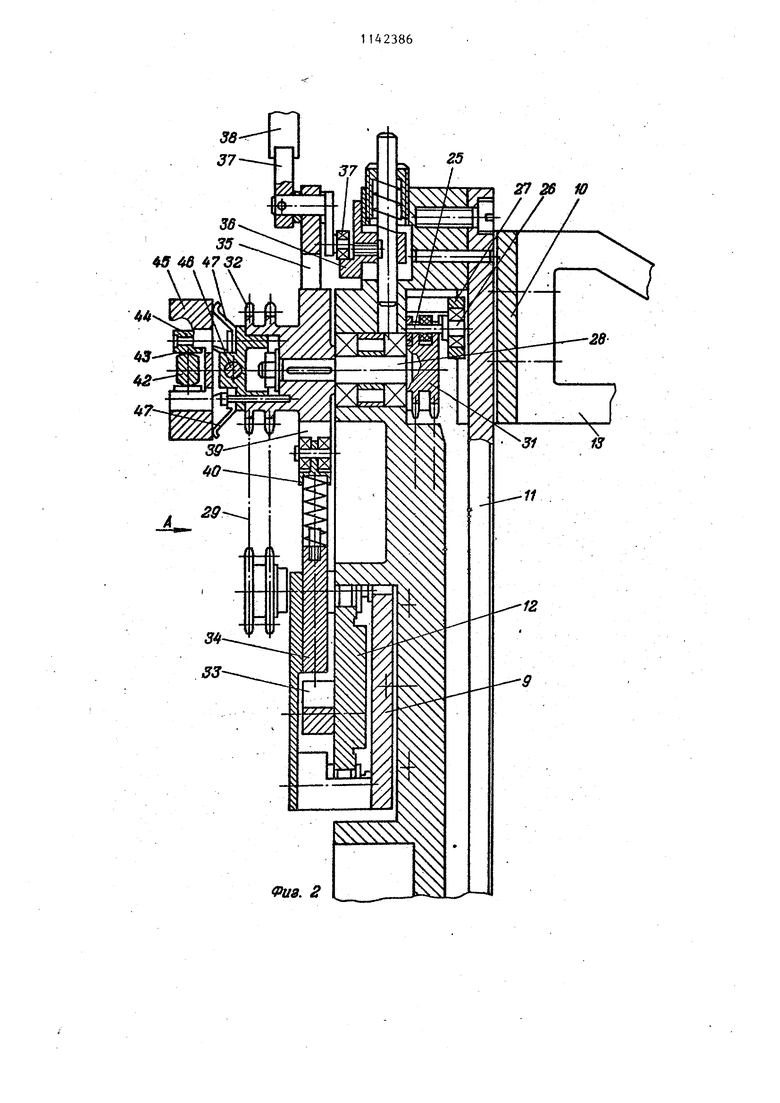
Изобретение относится к автоматизации химических процессов нанесения различных покрытий. Известна установка для нанесения покрытий, включающая ряд ванн, расположенных по ходу технологического процесса, автооператорное устройство, выполненное в виде перемещающейся в гориз-онтальных направляющих, от привода посредством транспортирующей цепи тележки, на которой в вертикал ных направляющих установлена подвижно от привода каретка с захватами для изделий и устройство для фиксации автооператора в виде размещенных возле каждой ванны гнезд-ловителей и фиксатора, укрепленного на подпружиненной тяге, установленной на каретке, при этом привод перемещения каретки выполнен в виде замкнутого цепного контура, вал одной из звездочек которого снабжен дополнительной звездочкой, взаимодействующей с транспортирующей цепью, при этом на валу укреплена тормозная муфта, соединенная посредством рычажного механизма с подпружиненной тягой :фиксат.ора. Автооператорное устройство снабжено приспособлением блокировки вращения вала основной и дополнительной звездочек, выполненным в виде закрепленного на вьшеуказанном валу корпуса симметричным оси его вращения пазом и жестко смонтированных на позициях загрузки и выгрузки стержневых упоров, установлен ных с возможностью размещения в пазу корпуса. Корпус закреплен на валу посредством шарнирно-плавающего соединения, при этом стержневые упоры выполнены с цилиндрическими поверхностями, а корпус имеет попарно уста новленные ролики, которые удалены в каждой паре друг от друга на ширину паза. При горизонтальном перемещении тепежки тормозная муфта удерживает вращение приводного вала посредством подпружиненного выключения вертикаль ного хода каретки во время транспортировки между позициями от случайных нагрузок на ход каретга, например, , вызванных повышенным трением в подвижных элементах в результате их загрязнения или недостатка смазки fl Недостаток устройства-прототипа заключается в том, что при использовании сопутствующих механизмов, а именно поворотного захватного устройства, встроенного в автроператор 862 и срабатывающего от путевых упоров при подходе автооператора к позициям загрузки и выгрузки, а также клещевых захватов, взаимодействующих посредством кулачков со скосами с упорами, происходит значительное нагружение горизонтального хода тележки и соответственно тормозной муфты, что приводит к неустойчивости ее работы, может вызвать ее выключение и создать аварийную ситуацию. Цель изобретения - повьшение надежности работы установки на позициях загрузки и выгрузки. Поставленная цель достигается тем, что в установке дпянанесения покрытий по авт.св. № 1049383 автооператорное устройство снабжено приспособлением бло кировки вращения вала основной и дополнительной звездочек, выполненным в виде закрепленного на вышеуказанном валу корпуса с симметричным оси его вращения пазом и жестко смонтированных на позициях.загрузки и выгрузки стержневых упоров, установленных-с возможностью размещения в пазу корпуса. Корпус закреплен на валу посредством шарнирно-плавающего соединения, при этом стержневые упоры выполнены с цилиндрическими поверхностями, а корпус имеет попарно установленные ролики, которые удалены в каждой паре друг от друга на ширину паза. На фиг. 1 схематически изображена установка для нанесения покрытий; н фиг. 2 - а втооператорное устройство, разрез; на фиг. 3 - вид А на фиг.2. Установка состоит из ряда ванн, расположенн.ык по ходу технологического процесса, и автооператорного устройства . Ряд технологических ванн включает ванну 1 флюсования, ванну 2 обслуживания и удаления иЗJгшшкoв припоя, обеспечивающую процесс нивелирования слоя припоя 3 на изделии 4 в струях горячего масла 5 при условии прохожения изделия 4 с определенной скооСтью технологического диапазона скоростей между форсунками 6 подачи масла 5 под давлением от системы насосов 7 и ванну 8 струйной отмывки масла и флюса. Автооператорное устройство вьшолнено в виде тележки 9 горизонтального перемещения и каретки 10 вертиального перемещения, вертикальных направляющих 11 каретки 10, закрепленных на тележке 9 и горизонтальных направляющих 12 тележки 9, распо ложенных вдоль технологических ванн 1,2 и 8. Захват 13 установлен на каретке 10 и вьшолнен в виде поворотной штан ги 14 с клещевыми захватами 15, кине матически связанной с нутевыми упорами 16 и 17, неподвижно закрепленны ми на позициях загрузки 18 и выгрузки 19 посредством ответного рычага 20 и передаточного механизма 21, а клещевые захваты 15, взаимодействующие с неподвижным упором 22 и откиды вающимся упором 23, снабжены ответными кулачками 24 со скосом, и замкнутого цепного контура 25, связанно го с захватом 13 посредством водила 26, устано.вленного на цепном контуре 25 и паза 27 на каретке.10. На тележке смонтирован приводной вал для замкнутого цепного контура 25. Вдоль ванн 1,2 и 8 преложена транспортирующая цепь 29, привод 30 которой выполнен с возможностью регулирования и изменения числа оборотов (не показано). На валу 28 установлены звездочки основная 31 и до-, полнительная 32 так, что звездочка 31 постоянно зацеплена с замкнутьм цепным контуром 25, а-звездочка 32 с транспортирующей цепью 29. Автооператорное устройство имеет фиксаторные приспособления, включающие в себя гнезда-ловители 33, установленные у каждой ванны 1,2 и 8, фиксатор 34, закрепленный на подпружиненной тяге 35, подвижно закреплен ной на тележке 9, контактирующие упо ры 36 и 37, причем упор 36 жестко закреплен на захвате 13, а упоры 37 шарнирно закреплены на тяге 35, путе вые упоры 38, установленные у каждой ванны 1,2 и 8 и выполненные в виде откидывающихся собачек. На валу 28 установлена тормозная муфта 39, кото рая связана с тягой 35 рычажным механизмом 40. Автооператорное устройство имеет приспособление блокировки вала 28, которое выполнено в виде стержневых упоров 41 и 42, снабженных цилиндрическими опорными поверхностями и закрепленных неподвижно на позициях загрузки 18 и выгрузки |9 изделий 4 и ответного паза 43, образованного равносмещенными от центра парами роликов 44 вращения, установленных в 864 корпусе 45с возможностью обхвата стержневых упоров 41 и 42, а корпус 45 установлен на приводном валу 28 посредством шарнирного соединения 46 и опорньк пружин 47 и кинематически связан с замкнутым цепным контуром 25так, что в верхнем положении каретки 10 паз 43 строго горизонтален. Установка для нанесения покрытий работает следующим образом. При включении привода 30 (рассматриваемое исходное положение - каретка 10 в нижнем положении, тележка 9 неподвижна) транспортирующая цепь 29 посредством звездочки 32 и приводного вала 28 передает вращение на звездочку 31. Захват 13 посредством замкнутого цепного контура 25, водила 26и паза 27 пер ещается вверх по направляющей 11. В верхнем положении захвата 13 упор 36, воздействуя на упор 37, поднимает тягу 35. В крайнем верхнем положении тяги 35 фиксатор 34 выходит из зацепления с гнездом-ловителем 33, а рычажный механизм 40 включает тормозную муфту 39, а паз 43, образованньй роликами 44 в корпусе 45, располагается горизон-i тально. При таком положении сопротивление перемещению горизонтальной тележки 9 по направляющей 12 значительно ниже сопротивления вращению приводного вала 28, поэтому тележка 9 и каретка 10 посредством транспортирующей цепи 29 перемещается вправо к позиции выгрузки 19. Выгрузка изделий осуществляется следующим образом. При подходе тележки 9 к позиции выгрузки 19 стержень 42 входит в зацепление с роликами 44 и блокирует вал 28 от проворота. Затем при взаимодействии неподвижного упора 16 с рычагом 20 поворотная штанга 14 посредством передаточного механизма 21 переводит клещевые захваты 15 с изделиями 4 в горизонтальное положение, изделия 4 доставляются на позицию 19 и при взаимодействии неподвижного упора 22 с кулачками 24 со скосами клещевые захваты 15 раскрываются и освобождаются от изделий 4. Срабатывание муфты 39 и последующее включе1ше хода каретки 10 от дополнительных нагрузок при срабатывании поворотного механизма штанги 14 и клещевого захвата 15 на позициях 19 и 18 исключается приспособл ением блоки- ; ровки приводного вала 28.
S
После раскрывания клещевых захва тов 15 и освобождения их от изделий 4 на позиции выгрузки 19 происходит реверс привода 30 и тележка 9 движется влево. При выходе из зацепление кулачков 24 со скосами с упором 22 клещевые захваты закрьшаются. По окончании взаимодействия рычага 20 с упором .16 поворотная штанга 14 посредством передаточного механизма 21 переводит клещевые захваты 15 в вертикальное положение, а стержень 42 выходит из зацепления с роликами 44. Далее при движении влево к позиции загрузки 18 упоры 38 откидываются и не взаимодействуют с упором 37, а при подходе тележки 9 к позиции 18 стержень 41 входит в зацепление с роликами 44 и блокирует вал 28 от проворота. Затем при взаимодействии неподвижного упора 17 с рычагом 20 поворотная штанга 14 посредством передаточного механизма 21 переводит клещевые захваты 15 в.горизонтальное - исходное (для захвата изделия 4) положение. При взаимодействии кулачков 24 со скосами с открывающимся упором 23 клещевые захваты 15 раскатываются и принимают изделие 4, далее после взаимодействия.кулачков 24 с угором 23 клещевые захваты замыкаются, после чего привод 30 реверсируется и тележка 9 с изделием 4 совершает перемещение .вправо. При этом упор 23 открьшается, рычаг 20 выходит из зацепления с упором 17, клещевые захваты 15 с изделием 4 принимают вертикальное положение, ролики 44 выходят из зацепления со стержнем 41. При дальнейшем перемещении системы контактирующий упор
86б
37 взаимодействует с.путевым упором 38, поворачивается и освобождает подпружиненную тягу 35 от взаимодействия последней с контактирую11р1м упором 36. При этом фиксатор 34 попадает в гнездо-ловитель 33, улор 37 возвращается в исходное положение, а муфта 39 выключается посредством рычажного механизма 40. Тележка 9 останавливается, а приводной вал 28 получает вращение от привода 30 посредством транспортирующей цепи 29 и звездочки 32, при этом звездочка 31 также получает вращение и посредством цепного контура 25, водила 26 и паза 27 пере1мещает каретку 10 вниз и изделие 4 доставляется в ванну 1. После обхода водила 26 нижней части цепного контура 25 каретка 10 начинает перемещение вверх.
Предлагаемое устройство сохраняет надежную работу прототипа и исключить аварийные ситуации при дЬполни тельном оснащении прототипа сопутствующими механизмами, срабатывающими по пути, так как в силу конструктивной особенности автооператорного устройства усилия, вызванные путевыми устройствами, могут вызвать нежелательное включение хода вертикальной каретки. Кроме того, вьшолнение паза приспособления блокировки в виде роликов, ответных поверхностей
упоров - цилиндрическими, а соединения корпуса с валом шарнирно-плавающим повышает эксппуатационные характеристики за счет уменьшения нагрузок от работы дополнительного устройства, возникающих при перекосах системы. Фиа. 2 27 2В fO

| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для нанесения покрытий | 1978 |
|
SU1049383A1 |
| Установка для нанесения покрытий | 1989 |
|
SU1678721A2 |
| Производственный модуль для штамповочных работ | 1988 |
|
SU1685576A1 |
| Гальваническая автооператорная линия для обработки мелких деталей | 1981 |
|
SU986972A1 |
| Многопозиционная машина для бесшвейного скрепления книжных блоков | 1989 |
|
SU1671474A1 |
| Многопильный станок для продольной распиловки короткомерных бревен | 1982 |
|
SU1066804A1 |
| АППАРАТ ДЛЯ ЭТИКЕТИРОВАНИЯ ИЛИ ПРИКРЕПЛЕНИЯ ТОНКИХ ЛИСТОВЫХ ИЗДЕЛИЙ К ПЛОСКИМ ПОВЕРХНОСТЯМ ПРЯМОУГОЛЬНЫХ УПАКОВОК | 1997 |
|
RU2109664C1 |
| Линия для химической и электрохимической обработки деталей | 1977 |
|
SU723014A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
1. УСТАНОВКА ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЙ по авт.св. № 1049383, о тл и ч а ю щ а я сЯ тем, что, с целью повышения надежности работы уста новки на позициях загрузки и выгрузки, автооператорное устройство снабжено приспособлением блокировки вра(Л щения вала основной и дополнительных звездочек, выполненного на вышеуказанном валу корпуса с симметричным оси его вращения пазом и жестко смонтированных на позициях загрузки и выгрузки стержневых упоров, установленных с возможностью размещения в пазу корпуса. 2. Установка по п. 1, отличающаяся тем, что корпус закреплен на валу посредством шарнирноплавающег.о соединения, при этом стержневые зщоры выполнены с цилиндрическими поверхностяьш, а корпус имеет попарно установленные ролики, которые удалены в каждой паре друг от друга на ширину паза
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
