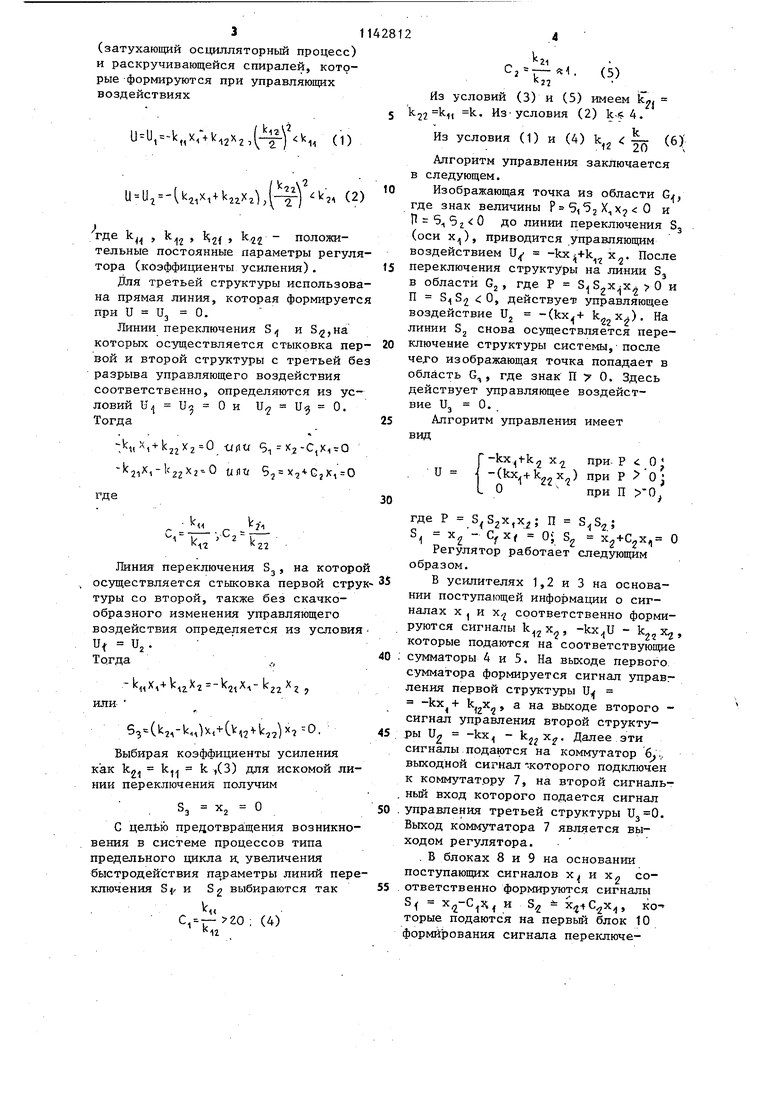
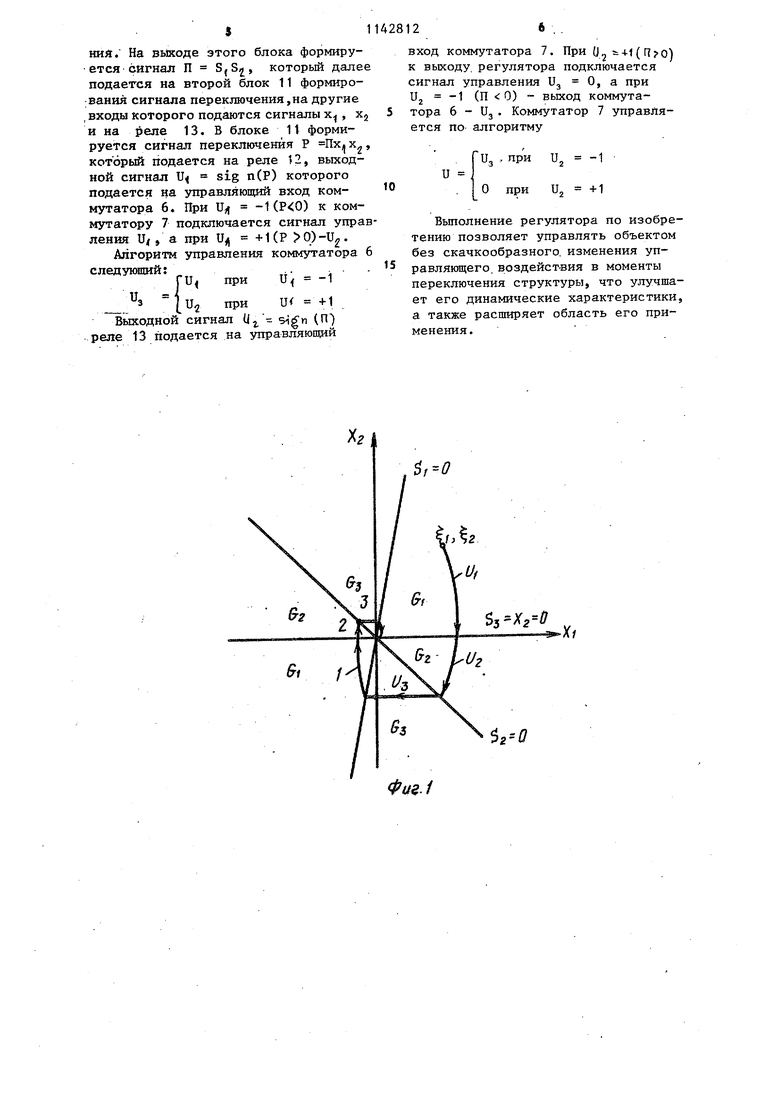
Изобретение относится к.области автоматического управления динамическими объектами и, в частности, может найти применение в управлении объектами с двойным интегрированием в химической, нефтехимической и других отраслях промышленности. Известен регулятор, которьй обеспечивает перевод состояния объекта в начале координат -в режиме переключения двух линейных структур m, Недостаток регулятора состоит в том, что. в момент переключения струк туры управляющее воздействие скачком изменяет свое значение. Наиболее близким техническим реше нием к изобретению является регулятор, содержащий первый и второй усилители, соединенные с сумматором 2j Недостаток данного регулятора обусловлен тем, что в момент .переклю чения структуры управляющее воздействие скачком изменяет свое значение При этом исполнительные механизмы системы , где используется такой регулятор, претерпевают большие перегрузки, что ухудшает динамические характеристики, снижает надежность и долговечность, а также ограничива. ет область примене:Ешя регулятора. Цель изобретения - улучшение динамических характеристик регулятора при работе с объектом управления с двойным интегрированием и расширение области его применения. Поставленная цель достигается тем что в регулятор с переменной структурой, содержащий первый.и второй усилители, соединенные с первым сумматором, дополнительно введены третий усилитель, второй сумматор, первьш и второй двухканальные коммутаторы, первый и второй блоки формирования линии переключения, первьй и второй блоки формирования сигнала переключения, первое и второе реде и дифференциатор, причем выходы второго и третьего усилителей соединены с входами второго сумматора, выходы первого и второго сумматоров соединены соответственно с первым и вторым входами первого двухканального коммутатора, выход которого соединен с первым входом второго двухканально го коммутатора, въкод которого является выходом регулятора, вход ре гулятора соединен с входом второго усилителя, с первымивходами геерво-. го и второго блоков формирования линии переключения и второго блока формирования сигнала переключения и входом дифференциатора, выход которого соединен с входами первого & третьего усилителей и вторыми входами блока формирования сигнала переключения и блоков формирования линии переключения, выходы первого и второго блоков формирования линии переключения соединены соответственно С первым и BTopbLM входами первого блока формирования сигнала переключения, выход которого соединен с третьим второго блока формирования линии переключения и входом второго реле, выход которого соединен с вторым входом второго двухканального коммутатора, к третьему входу которого подключен источник нулевого сигнала, выход второго блока формирования сигнала переключения через первое реле соединен с третьим входом первого двухканального комментатора. На фиг.1 и 2 представлены фазовый портрет и переходной процесс системы управления с регулятором с переменной структурой соответственно на фиг. 3 - блок-схема предлагаемого регулятора. При этом приняты следующие обозначения: х,, х„ - сигналы рассогласования и скорости его изменения jUj- управляющие воздействия, где i 1,2.... Регулятор содержит усилители 1, 2 и 3, сумматоры 4 и 5, двухканальные коммутаторы 6 и 7, блоки 8 и. 9 формирования, лишш переключения, блоки 10 и 11 формирования cifгнала nei еключентад:, реле 12 и 13, дифференциатор 14, источник 15 нулевого сигнала. В рассматриваемом случае использовани5г регулятора объект управления.является звеном с двойным интегрирование, который описьгаается выражением х,(, х,Со)|,. Перевод изображающей точки в начало координат осуществляется путем формирования и последовательного спшвания .трех линейных структур. Первая и вторая структуры соответственно состоят из скручивающейся
(затухающий осщтляторный процесс) и раскручивающейся спиралей, которые -формируются при управляющих воздействиях
U-U, -k,,x;+k,2X2,(-)kl/ (1) U U, -(.),() (2)
л
где k , 2f i положительные постоянные параметры регулятора (коэффициенты усиления).
Для третьей структуры использована прямая линия, которая формируется при и Uj 0.
Линии переключения S и 8,на которых осуществляется стыковка первой и второй структуры с третьей без разрыва управляющего воздействия соответственно, определяются из уси и 0. ловий и и О и Тогда
-;k,,X,+ k22X2 0 -Udtf 61 X2-C,XirQ
, О кят/ 5 x -t-GjK, 0
где
t- V-
.
21
Линия переключения S, на которой осуществляется стыковка первой структуры со второй, также без скачкообразного изменения управляющего воздействия определяется из условия
Uf Ua Тогда/,
- k,X,-t-k,, К22 Х у
или
5,(k2A-Mx,+Cv,2(«)x,0.
Выбирая коэффициенты усиления как kg, k, k ,(3) для искомой линии переключения получим
О
БЗ х
С целью предотвращения возникновения в системе процессов типа предельного цикла и. увеличения быстродействия параметры линий переключения Sf и Sg выбираются так :
м
С,(4)
Чг
21
Ч
«1. (5)
Z2
Из условий (3) и (5) имеем k,
;22 ki, k. Из-условия (2) . Из условия (1) и (4) k
(6)
Алгоритм управления заключается в следующем.
Изображающая точка из области G, где знак величины Р 5, SjX, и П 5 5 г О до линии переключения 83 (оси Х;|), приводится управляющим воздействием U х. После
переключения структуры на линии Sj в области G, где Р и П 0, действует управляющее воздействие U -( ). На линии Sj снова осуществляется переключение структуры системы, после чего изображающая точка попадает в область G,, где знак П 0. Здесь действует управляющее воздействие и, 0.
Алгоритм управления имеет
вид
х при- Р 0 -() при Р 0; О при П 0
где Р П
S , 0« $2 Х2+С2Х, О
Регулятор работает следующим образом.
В усилителях 1,2 и 3 на основании поступающей информации о сигналах X , и х соответственно формируются сигналы k.x, - k, х , которые подаются на соответствующие
сумматоры 4 и 5. На выходе первого сумматора формируется сигнал управг ления первой структуры U -kx + 3 на выходе второго сигнал управления второй структуры 1/2 -kx, - . Далее эти сигналы подаются на коммутатор 6... выходной сигнал -которого подключен к коммутатрру 7, на второй сигналь. ный вход которого подается сигнал
.управления третьей структуры . Выход коммутатора 7 является выходом регулятора.
. В блоках 8 и 9 на основании поступающих сигналов х и Хл соответственно формируются сигналы S и S , КО торые подаются на первый блок 10 формирования сигнала переключеSния. На выходе этого блока формируется сигнал П SjSj, который дале подается на второй блок 11 формирования сигнала переключения,на другие , входы которого подаются сигналы х , X и на реле 13. В блоке 1I формируется сигнал переключения Р -Их/, х который подается на реле t2, выходной сигнал и sig п(Р) которого подается на управляющий вход коммутатора 6. При и -1() к коммутатору 7 подключается сигнал упра ления и , а при и +1(Р 0)-U2. Алгоритм управления коммутатора следующий:.. )гющий: при и -1 . П, 2 при и +1 Выходной сигнал (П) реле 13 подается на управляющий вход коммутатора 7. При Ц ) к выходу регулятора подключается сигнал управления U 0, а при и -1 (П 0) - выход коммутатора 6 - Uj. Коммутатор 7 управляется по- алгоритму и , при и -1 О при и, +1 Выполнение регулятора по изобретению позволяет управлять объектом без скачкообразного, изменения управляющего, воздействия в моменты переключения структуры, что улучшает его динамические характеристики, а также расширяет область его применения.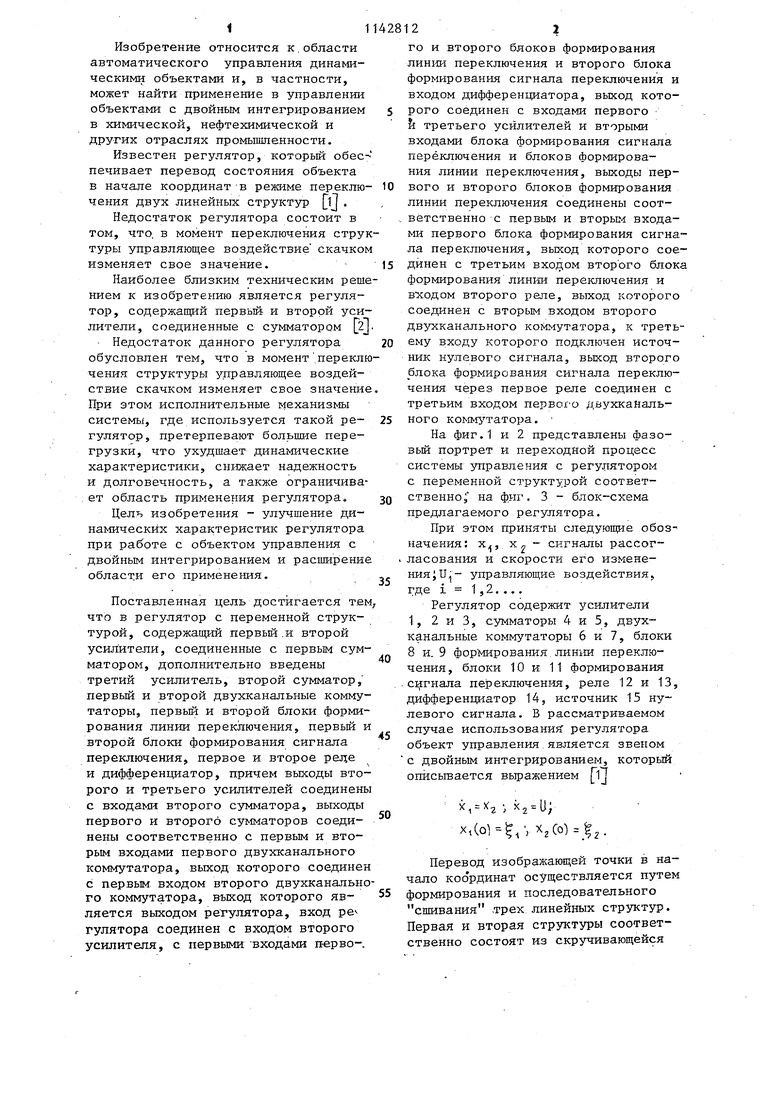
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления с переменной структурой | 1984 |
|
SU1171754A1 |
| Квазиинвариантный финитный регулятор с переменной структурой | 1986 |
|
SU1385123A1 |
| Устройство для управления роботом | 1988 |
|
SU1618636A1 |
| Регулятор | 1983 |
|
SU1166060A1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Регулятор с переменной структурой | 1980 |
|
SU894673A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Регулятор с переменной структурой | 1981 |
|
SU993208A1 |
| Адаптивный регулятор с регулируемой обратной связью | 1985 |
|
SU1287104A1 |
| Следящая система | 1986 |
|
SU1352451A1 |
РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ, содержащий первый и второй усилители, соединенные с первым сумматором, отличающийся тем, что, с целью улучшения динамических характеристик при работе с объектом управления с двойным интегрированием и расширения области его применения, в него введены третий усилитель, второй сумматор, первый и второй двухканальные коммутаторы, первый и второй блоки формирования линии переключения, первьй и второй блоки формирования сигнала переключения, первое и второе реле и дифферелциатор, причем выходы второго и третьего усилителей соединены с входами второго сумматора, выходы первого и второго сумматоров соединены соответственно с первым и вторым- входами первого двухканального коммутатора, выход которого соединен с первым входом второго двухканального коммутатора, выход которого является выходом регулятора, вход регулятора соединен с входом второго усилителя, с первыми входами первого и второго блоков формирования линии переключения и второго блока формирования сигнала переключения и входом дифференциатора, выход которого соединен с входами первого и третьего усилителей и вторыми входами блока (Л формирования сигнала переключения и блоков формирования линии переключения, выходы первого и второго блоков формирования линии переключения соединены соответственно с первым и вторым входами первого .блока формирования сигнала переключения, выход которого соединен с третьим входом второго блока форь ирования линии переключения и входом второго реле, выход которого соединен с вторым входом второго двухканального коммутатора, к третьему входу которого подключен источник нулевого сигнала, выход второго блока формирования сигнала переключения через первое реле соединен с третьим входом первого двухканального коммутатора.
Фи.1
IA;
ЗГ 1МцО
Фиг.г Фиг. J Tul-o r-i и
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Атанс М., Фалб П | |||
| Оптимальное управление | |||
| М., Машиностроение, 1968, с | |||
| ЯКОРЬ ДЛЯ МАШИНЫ ВЫСОКОЙ ЧАСТОТЫ | 1922 |
|
SU535A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Емельянов С.В | |||
| Системы-автоматического управления с переменной структурой | |||
| М., Наука, .1967, с | |||
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
