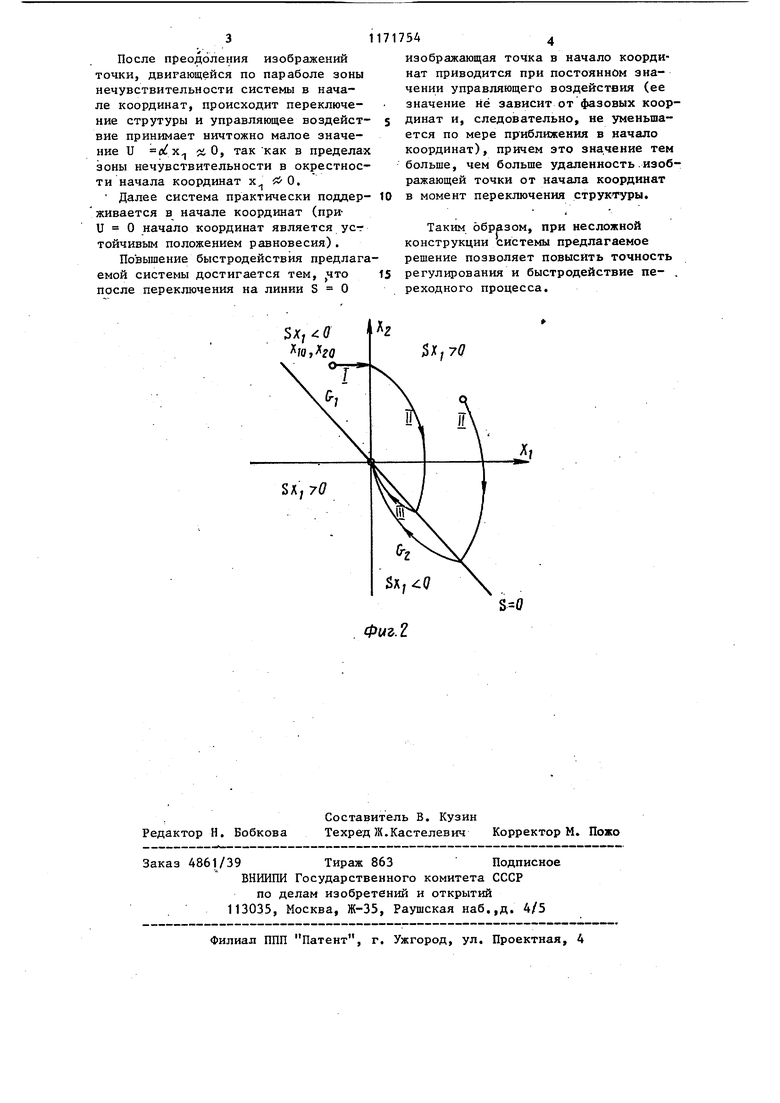
Изобретение относится к автоматическому упраглению и регулированию линейными динамическими объектами и может быть использовано для управления различными технологическими процессами. Цель изобретения - повышение быст родействия и,, точности системы. .. { изображена структурная схема системы; |.на фиг. 2 - схема .принципа действия системы на правой .полуплоскости фазового портрета. Система управления содержит элемент 1 сравнения, усилитель 2, двухканальный коммутатор 3- с паматью, включающий в себя первый ключ, втор ключ 5 и элемент 6 памяти, инвертор 7,- объект 8 управления, дифференциатор 9, блок 10 формирования функции переключения, реле 11. Система управления работает по с дующему алгоритму: V 1,если (х ,x) 10 го -o6x const, где X g-.S сигнал ошибки; g - входное воздействие (задание); Ц - выходная координата объекта; , .,,S X2+cx, ,,VG Х2 х - производная ошибки; (, k 0 - коэффициенты усиления системы и объекта 8 с передаточной функцией k/p2; X начальные значения ошибки и ее производной. На выходе элемента 1 сравнения на основании поступающей с объекта 8 информации Ч и задания g формируется сигнал ошибки х g - Ч , который подается на вход усилителя 2. На выходе последнего формируется сигнал управления, который подается на ключ А, В блоке 10 формирования функции переключения на основании поступающей с элемента Т сравнения информации х а с дифференциатора 9 - Х2 формируется сигнал переключения Р Sxj, который подается на вход реле 11, выходной сигнал V sign Р. Последний подается на управляющий вход коммутатора 3, который управ-; ляется следующим образом. При V 1 (Sx 0) ключи 4 и 5 на ходят.ся в. нормально разомкнутом по4. 2 ложении fc , при.У -1 (Sx 0) - в нормально .замкнутом положении «. До включения системы ключи 4 и 5 находятся в нормально замкнутом положении о( . При этом на выходе элемента 6 памяти имеется нулевой сигнал. Если при пуске системы начальное .состояние (х, з) находится в области G G V G , где V -1 () , то ключи продолжают оставаться в положении а и через инвертор 7 на вход объекта 8 подается нулевой сигнал управ 1ения U 0. При этом до оси X, 2 изображающая точка двигается по прямой линии (траектория 1, фиг. 2). После перелета оси х выходной сигнал реле 11 меняет знак, т.е. V 1 (Sx 7 0), и ключи 4 и 5 переключаются в положение Ь. В этом случае через элемент 6 памяти на вход объекта 8 подается сиг нал управления -U ot х. При этом до линии 5 0 из.ображающая точка дви-/ гается по эллипсу (траектория Ц, фиг. 2). Далее в области G2 выходной сигнал реле11 опять изменяет знак, т.е. S. -1 (Sx., :: 0), и ключи 5 и 4 переключаются в положение а. В этом случае через инвертор 7 на вход объекта 8 подается постоянный сигнал управления U (-1) -oi X, . , соответствующий значению сигнала на входе элемента 6 памяти в момент его размыкания. Тогда изображающая точка в начало координат двигается: по параболе (траектория ИГ, фиг. 2). Выбором углового коэффициента линия переключения S-О, как С V 2o/k, обеспечивается прохождение парабол (траектория III, фиг. 2), начинающихся по линии переключения , через начало координат, поскольку для начальных условий ( х..,., параболы (является решением канонического уравнения объекта при U const О), находящихся на линии переключения , удовлетворяется соотношение так как на линии S химеем X2f - V2oikx и U -dx у const. 3 После преодоления изображений точки, двигающейся по параболе зоны нечувствительности системы в начале координат, происходит переключение струтуры и управляющее воздействие принимает ничтожно малое значение и ii О таккак в пределах зоны нечувствительности в окрестности начала координат х. Далее система практически поддерживается в начале координат (прии О начало координат является усг тойчивым положением равновесия). Повышение быстродействия предлага емой системы достигается тем, ITO после переключения на линии
SX,4ff
га,го
5х,
Фиг.г 54 изображающая точка в начало координат приводится при постоянном значении управляющего воздействия (ее значение не зависит от фазовых координат и, следовательно, не уменьшается по мере приближения в начало координат), причем это значение тем больше, чем больше удаленность.изображающей точки от начала координат в момент переключения структуры. Таким образом, при несложной конструкции системы предлагаемое решение позволяет повысить точность регулирования и быстродействие пе- . реходного процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Квазиинвариантный финитный регулятор с переменной структурой | 1986 |
|
SU1385123A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1985 |
|
SU1381445A1 |
| Регулятор с переменной структурой | 1983 |
|
SU1142812A1 |
| Система управления объектом с присоединенным упругодеформируемым элементом | 1986 |
|
SU1403015A1 |
| Устройство с размытой логической самоорганизацией для автоматического управления объектом,например ректификационной колонной | 1986 |
|
SU1434402A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1989 |
|
SU1659981A2 |
| Регулятор с переменной структурой | 1978 |
|
SU736046A1 |
| Устройство для оптимального управления объектами второго порядка | 1982 |
|
SU1078404A1 |
| Система терминального управления упругим объектом | 1987 |
|
SU1434403A1 |
| Устройство для автоматического управления | 1980 |
|
SU868699A2 |
СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ .СТРУКТУРОЙ, содержащая последовательно соединенные элемент сравнения, усилитель и первый ключ, последовательно соединенные дифференциатор, блок формирования функции переключения и реле, подключенное выходом к управляющему входу первого ключа, выход, а также первый и второй входы элемента сравнения подключены соответственно к второму входу блока формирования функции переключения, к выходу объекта и выходу задатчика, отличающаяся тем, что, с целью повышения быстродействия и точности системы, она содержит последовательI но соединенные элемент памяти, вто(Л рой ключ и инвертор, подключенный выходом к входу объекта, выход перс вого ключа соединен с входом элемента памяти, второй выход и управляющий вход второго ключа подключены соответственно к входу объек та и выходу реле. 1 ел 4)
