(54) РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления инерционным объектом при ограниченном управляющем воздействии | 1978 |
|
SU930251A2 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Устройство адаптации | 1979 |
|
SU813358A1 |
| Следящая система | 1977 |
|
SU642676A1 |
| Квазиинвариантный финитный регулятор с переменной структурой | 1986 |
|
SU1385123A1 |
| Нелинейный регулятор | 1984 |
|
SU1231483A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Устройство для управления процессом каталитического алкилирования | 1979 |
|
SU905799A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
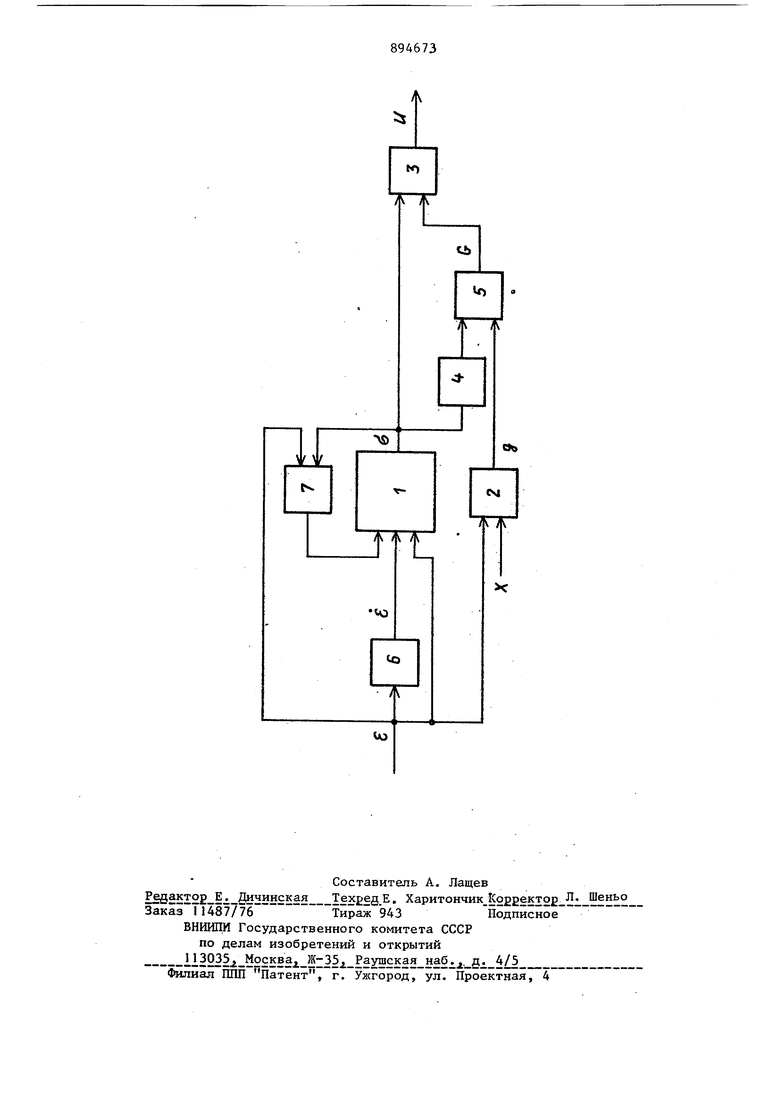
Изобретение относится к системам автоматического управления и может быть использовано для управления гид равлическим приводом. Известны регуляторы переменной структуры, содержащие блок формирования функции переключения, блок переменных коэффициентов, блок за ПО1-а1нания экстремума и управляющее устройство 1 . Однако такие регуляторы обладают сложной конструкцией. Наиболее близким к предлагаемому является регулятор с переменной стр ктурой, содержащий блок формирования линии переключения и последовательно соединенные блок формирования управляющего сигнала, инвертор, функциональный преобразователь и сумматор, выход формирователя линии переключения соединен со вторым входом функционального преобразователя, а вход через блок формировани управляющего сигнала - со вторым входом сумматора 2. Однако при сравнительной простоте конструкции известного регулятора, он обладает недостаточной точностью регулирования, связанной с .формированием зон насьпцения для коэффициента передачи функционального преобразователя только по одному заведомо выбранному уровню управляющего сигнала. Цель изобретения - повьшение точности регулирования. Поставленная цель достигается тем, что регулятор содержит дифференциатор, формирователь ограничения, первый вход и выход которого соединен соответственно с выходом и вторым входом блока формирования управляющего сигнала, а второй вход - со входом блока формирователя линии переключения и через дифференциатор - с третьим входом блока формирования управляющего сигнала. На чертеже представлен регулятор структурная схема. Регулятор содержит блок 1 формир вания управляющего сигнала ,блок 2 формирования линии переключения, су матор 3, инвертор , коммутатор 5, блок формирования скорости ошибки дифференциатор 6, формирователь огр ничения (блок управляемого ограниче ния) 7. Регулятор работает следующим образом. В блоке 1, выполненным усилителе постоянного тока с большим коэффициентом усиления и неохваченным жес кой обратной связью, формируется сигнал .-. , ограниченный с помощью блока 7 ограничения в соответствии С сигналом & ошибки. Действие ограничения на формируе мый сигнал в соответствии с Е. эквив лентно изменению в функции от ошибки коэффициента передачи блока 1-КС Причем, чем больше ошибка, тем боль ще коэЛхЬициент передачи K(j. Таким образом, управляющий сигнал имеет вид 6 (+) КС. g-) При этом, поскольку на входе блока 1 присутствует сигнал Ч ошиб ки, возникает замкнутый контур с инерционной обратной связью в вцде охватываемого контуром объекта регу лирования (вибрационный контур). 3 результате возникает скользящий режим. Введение зависимости от ошиб ки в коэффициент передачи контура () значительно уменьшает величину пульсаций, свойственных скользящем режиму. Блок 2 формирует функцию переключения (Т вида g - SignE4-i SignX, где X - входное воздействие. Коммутатор 5 осуществляет переключение инвертированного управляю щего сигнала (5 в соответствии с функцией g. В результате на выходе блока 5 имеем . 1 d - Signe - signX. 34 Сигнал и на выходе сумматора 3 имеет вид (,)1(е) |-SignX. Ведение фу}1кции G в закон управления и уменьшает перерегулирования в обратную сторону, демпфирует тем самым систему и еще более сглаживает импульсное воздействие на систему скользящего режима, При использовании регулятора для управления гидравлическим приводом трехстепенной поворотной платформы получен высокоточный и качественный процесс регулирования. Фазовый сдвиг в диапазоне частот входного сигнала 0,1-1,5 Гц составил 5-10. Пульсация при этом вполне приемлема. Формула изобретения Регулятор с переменной, структурой, содержащий блок формирования линии переключения и последовательно соединенные блок формирования управляющего сигнала, инвертор, функциональный преобразователь и сумматор, выход формирователя линии переклзочения соединен со вторым входом функцпонального преобразователя, а вход через блок формирования управляющего сигнала - со вторым входом сумматора, отличающийся тем, что, с целью повышения точности регулятора, он содержит дифференциатор и формирователь ограничения, первый вход и выход которого соединен соответственно с выходом и вторым входом блока формирования управляющего сигнала, а второй вход - со входом блока формирователя линии переключения и через дифференциатор - с третьим входом блока фор1-1ирования управляющего сигнала. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР Н 629525, кл. G 05 В 13/02, 1978. 2.Авторское свидетельство СССР № 551609, кл. G 05 В 13/02, 1977 ( прототип).
