Известны однокоординатные следящие системы для автоматического копирования контуров произвольной формы путем управления силовым двигателем от золотника, шток которого взаимодействует с копировальным пальцем и получает сигналы, пропорциональные смещению последнего.
Погрешность копирования в таких следящих системах пропорциональна скорости слежения и нагрузке на силовом двигателе.
В описываемой однокоординатной гидравлической следящей системе силовому двигателю внутри системы сообщается управление, пропорциональное интегралу от погрешности копирования. Это обстоятельство обеспечивает уменьшение погрешности копирования при обработке контуров произвольной формы, которая не зависит от скорости слежения и примерно пропорциональна ее ускорению. С этой целью применен гидравлический цилиндр, щток которого взаимодействует с корпусом золотника и смещает его в осевом направлении, обеспечивая тем самым дополнительные пропорциональные интегралу погрешности копирования сигналы на силовой двигатель.
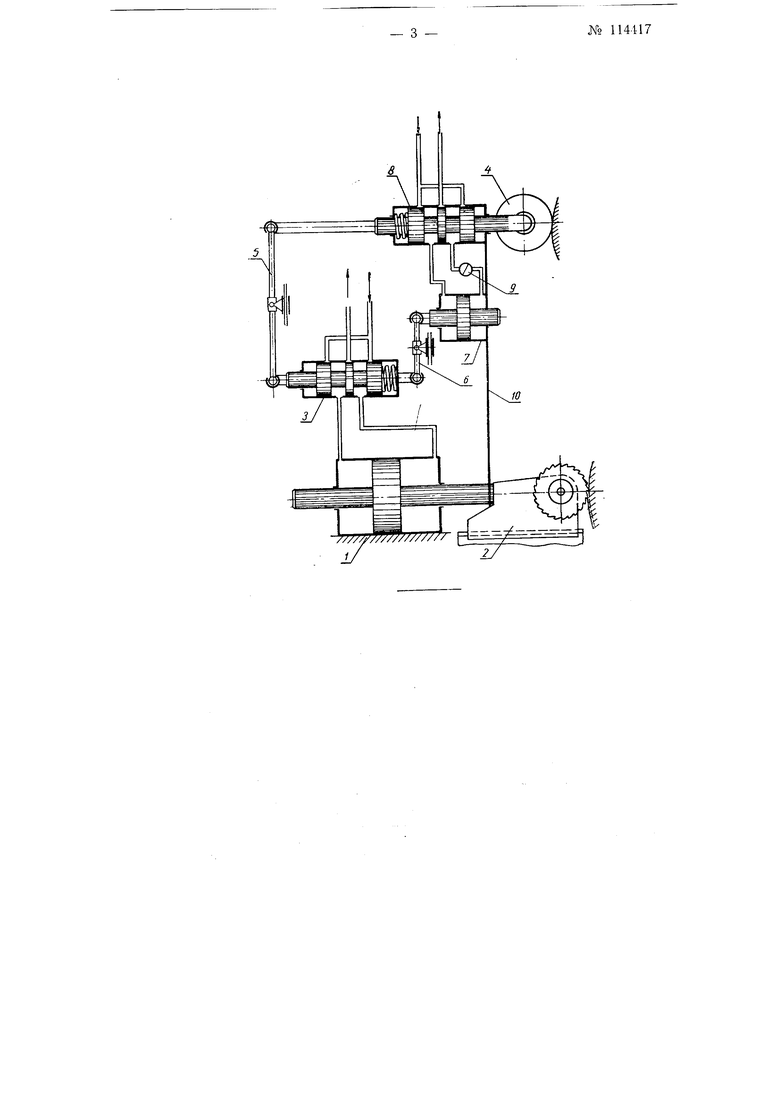
На чертеже изображена схема описываемой однокоординатной гидравлической следящей системы.
Силовым двигателем / системы, приводящим в движение исполнительный орган 2 копировального станка, управляет золотник 3,
Управляющие перемещения золотника 3 складываются из двух самостоятельных перемещений:
а)перемещения золотника, равного или пропорционального смещению копировального пальца 4 и осуществляемого, например, посредством рычага 5;
б)перемещения золотника или, как показано на чертеже, перемещения его корпуса, пропорционального интегралу от смещения копировального пальца 4 и осуществляемого посредством рычага 6 от штока
№ 114417
гидравлического цилиндра 7, управляемого золотником 8, соединенным с копировальным цальцем 4- Дроссель 9 служит для регулирования скорости перемещения поршня гидравлического цилиндра 7.
Система имеет обычную обратную связь по отработке, выполненную в виде жесткой связи 10, соединяющей корпус золотника 5 и гидравлический цилиндр 7 с исполнительным органом 2.
Точность копирования и независимость погрешности копирования от скорости слежения определяются, главным образом, каналом управления, состоящим из двух последовательно соединенных звеньев, а устойчивость следящей системы - коэффициентом усиления по каналу пропорционального управления.
Предмет изобретения
Однокоординатная гидравлическая следящая система для автоматического копирования контуров произвольной формы с применением в цепи управления силовым двигателем золотника, щток которого взаимодействует с копировальным пальцем и получает сигналы, пропорциональные смещению последнего, отличающаяся тем, что, с целью повыщения точности копирования, применен гидравлический цилиндр, щток которого взаимодействует с корпусом золотника и смещает его в осевом направлении, обеспечивая тем самым дополнительные пропорциональные интегралу погрещности копирования сигналы на силовой двигатель.