I
Устройство относится к станкостроению, а более конкретно к гидрокопировальным устройствам фрезерных станков.
Известно устройство для автоматического слежения по замкнутому контуру в приводах копировальных станков, включающее щуп, соединенный через эксцентриковую передачу с ротором двигателя 1.
К недостаткам известного устройства следует отнести необходимость выполнения сложной системы управления электрическим двигателем, что снижает быстродействие устройства и надежность.
Цель изобретения - повышение надежности и быстродействия, упрощение конструкции.
Для достижения поставленной цели эксцентриковая передача выполнена в виде кривошипа, включающего стакан и расположенный в нем подпружиненный палец, причем опоры кривошипа расположены эксцентрично по отношению к оси вращения ротора и геометрической оси щупа.
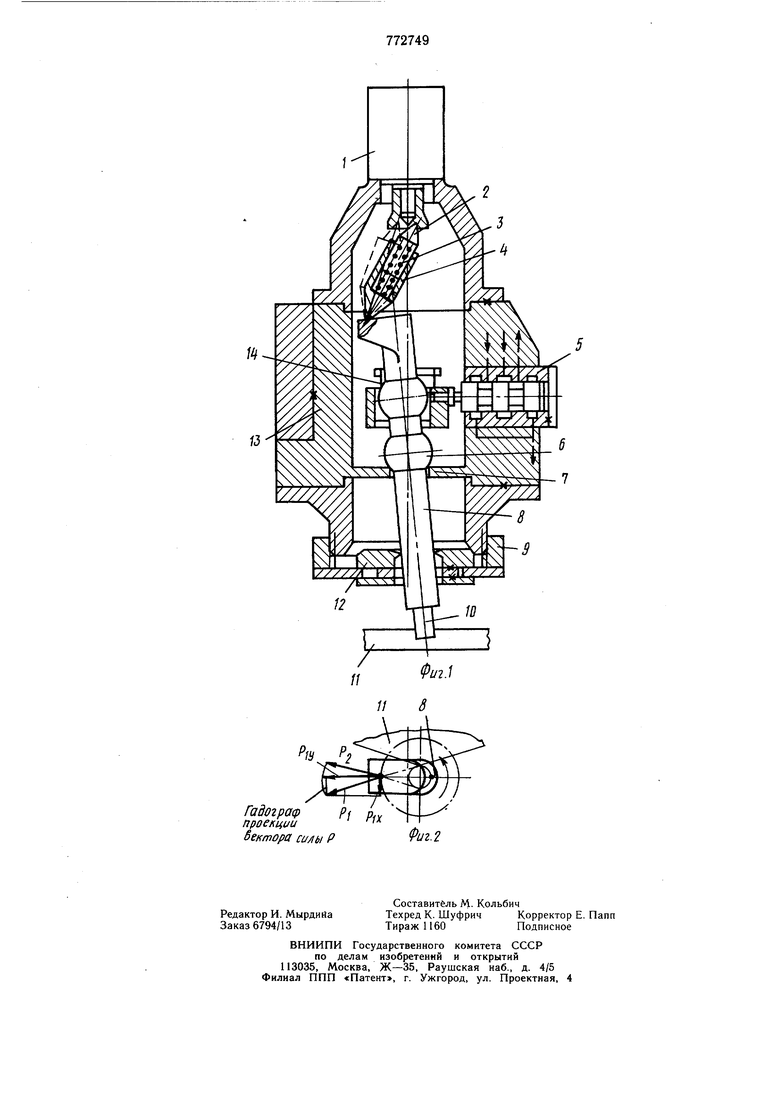
На фиг. 1 схематически изображено устройство, продольный разрез; на фиг. 2 - щуп и схема действия проекций сил на щуп, вид сверху.
Устройство содержит двигатель 1, палец 2 составного-пространственного кривошипа, взаимодействующий через пружину 3 со стаканом 4, в котором он расположен, следящий золотник 5, обеспечивающий управление силовым гидравлическим цилиндром одной из координат крестового стола (на фиг. не показаны), сферический щарнир 6, опирающийся на опору 7, выполненный на щупе 8, регулирующую скорость обхода контура гайку 9, ощупывающий наконечник 10,
10 контактирующий с копиром 11, радиальный упор 12, корпус 13, содержащий вышеперечисленные элементы, и следящий золотник 14, обеспечивающий управление силовым гидравлическим цилиндром второй координаты крестового стола.
15
Устройство работает следующим образом.
При свободном расположении щупа 8, ощупывающий наконечник 10 которого не входит в контакт с копиром, он совершает
20 конусообразное врашение вокруг геометрического центра универсального шарнира 6, увлекаемый ротором двигателя 1 посредством составного пространственного кривошипа, состояшего из пальца 2, пружины 3 и стакана 4, имеющего опоры, с одной стороны, несовпадающие с осью вращения ротора двигателя, а с другой - с геометрической осью щупа 8, причем ощупывающий наконечник 10 щупа 8 соверщает движение по окружности радиусом, определяемым коническим радиальным упором 12 (фиг. 1). Действительно, в любой точке окружности (описываемой точкой, соответствующей опоре кривошипа на щупе 8, в поперечном сечении) имеется условие для возникновения тангенциальной составляющей Р jx от силы пружины 3 (на фиг. 2 показана ее максимальная величина), т.е. условие для вращения щупа 8. При контакте ощупывающего наконечника 10 с копиром И щуп 8 прекращает вращение. Однако ротор двигателя 1 не останавливается и вращается в ту же сторону, как и прежде. В этом случае пружина 3 пространственного кривошипа 2 испытывает дополнительное сжатие, когда он занимает положения, отличные От положения, показанного на фиг. 1 сплошными линиями, в частности пунктиром. Вектор силы, развиваемой пружиной 3, описывает конус и немного изменяется по модулю (пружина периодически подвергается дополнительному сжатию с частотой вращения двигателя), а его проекция на горизонтальную плоскость колеблется Б пределах угла, определенного на фиг. 2 крайними положениями-векторами Pi и РЕ- Следует отметить, что проекция PIY составляющей вектора силы, развиваемой пружиной даже при его крайнем положении, всегда имеет направление, обеспечивающее наклон щупа 8 в направлении обхода контура. Однако из сказанного следует, что в положении вектора силы от пружины в части угла, равной половине определенной крайними положениями векторов Р i и Р щуп испытывает силу, отрывающую его от копира, что может привести к отрыву щупа от контура. Это не произойдет вследствие высокой частоты вращения ротора двигателя и уменьшения силы пружины на этом участке. Конечная величина быстродействия гидравлической части системы не позволит «отследить изменение направления силы прижима. При этом высокочастотная пульсация вектора силы способствует повышению точности копирования, так как исключает разницу между трением покоя и движения в подвижных стыках перемещающихся элементов, тем самым повышая чувствительность устройства. Работа следящих золотников 5 и 14, как в известных копировальных устройствах, обеспечивает необходимые направление и скорость рабочей подачи стола, определяемых наклоном щупа в соответствующем направлении, вследствие пропорциональности расхода рабочей среды, поступаемой и выпускаемой из соответствующих полостей гидроцилиндров через щели золотников, соответствующей наклону величины щупа. Поэтому установка скорости обхода контура осуществляется регулирующей ее гайкой 9 за счет осевого смещения радиального упора 12 и, соответственно, изменения зазора в конусном подвижном стыке. Связь щупа со следящим золотником осуществляется, например (как показано на фиг. 1) посредством сферической поверхности, выполненной на щупе, и хомутов с прямоугольным пазом, жестко связанных с золотником. Подвод щупа к контуру копира может осуществляться вручную. При нажатии на него рукой в нужном направлении, он прекращает вращение и, воздействуя на следящие золотники, определяет направление перемещения стола с копиром к щупу. Формула изобретения Устройство для автоматического слежения по замкнутому контуру в приводах копировальных станков, включающее щуп, соединенный через эксцентриковую передачу с ротором двигателя, отличающееся тем, что, с целью упрощения конструкции, повышения надежности и быстродействия, эксцентриковая передача выполиена в виде кривошипа, включающего стакан и расположенный в нем подпружиненный палец, причем опоры кривошипа расположены эксцентрично по отнощению к оси вращения ротора и геометрической оси щупа. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 101873, кл. В 23 Q 35/16, 1954.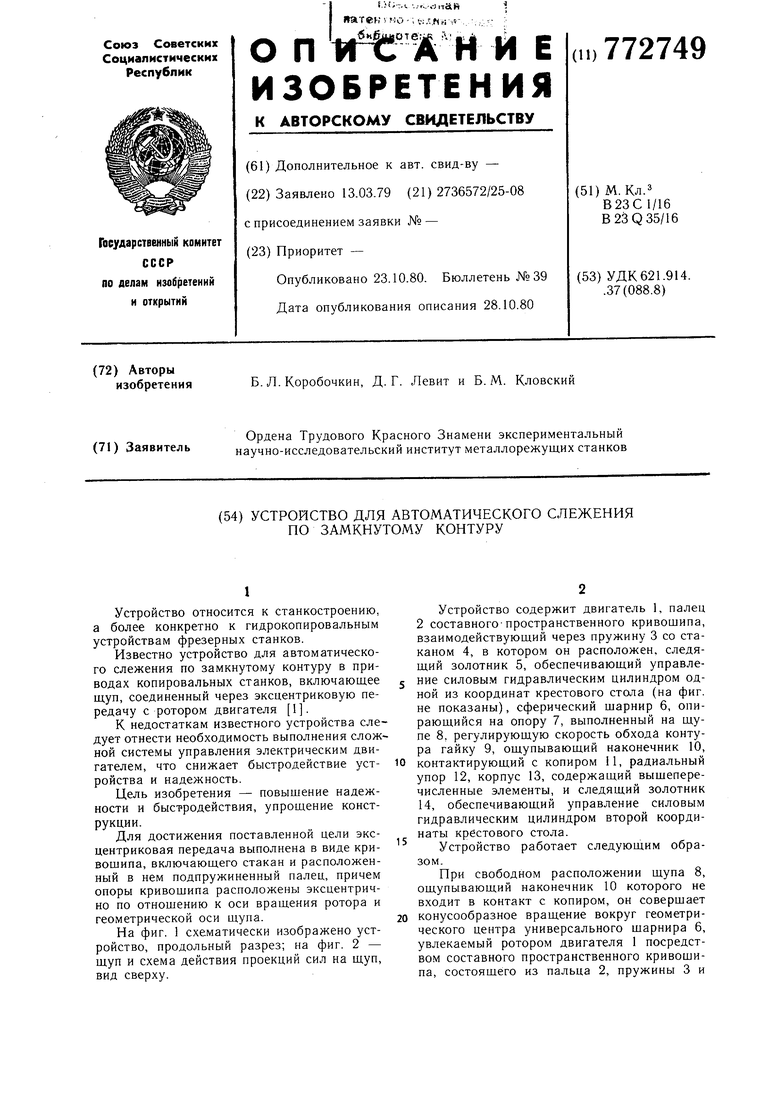
| название | год | авторы | номер документа |
|---|---|---|---|
| Копировальное устройство | 1979 |
|
SU776870A1 |
| Гидрокопировальный механизм | 1979 |
|
SU837768A1 |
| Гидрокопировальный механизм | 1982 |
|
SU1057246A2 |
| Гидрокопировальная система | 1984 |
|
SU1237384A1 |
| Гидравлическая копировальная система | 1980 |
|
SU882726A1 |
| Гидрокопировальный механизм | 1980 |
|
SU918027A1 |
| Копировальное устройство для металлорежущихСТАНКОВ | 1979 |
|
SU837767A1 |
| Полуавтоматический электрокопировальный фрезерный станок для обработки фасонных контуров больших размеров, в частности самолетных шаблонов | 1948 |
|
SU86730A1 |
| Электрическое устройство для копировальных станков | 1936 |
|
SU51822A1 |
| Двухкоординатная гидравлическая следящая система для автоматического копирования замкнутых контуров | 1958 |
|
SU126711A1 |