Предметом изобретения является двухкоординатная гидравлическая следящая система для автоматического копирования замкнутых контуров произвольной формы на копировальных станках.
Известны двухкоординатные гидравлические следящие системы для автоматического копирования замкнутых контуров произвольной формы путем одновременного управления по «каналу регулирования», двумя серводвигателями, осуществляющими продольные и поперечные подачи, с распределением рабочей среды в них золотниками, получающими перемещение от эксцентрика, поворачиваемого гидродвигателем, управляемым командным золотником, который получает перемещения от щупа.
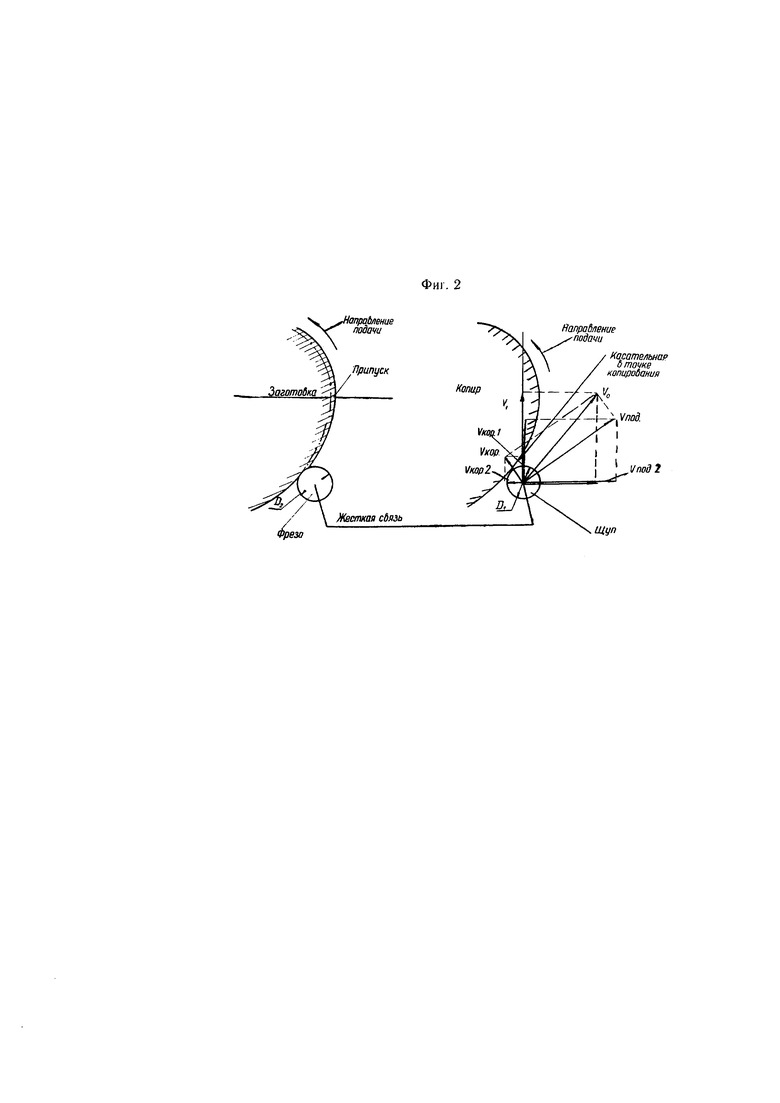
Описываемая двухкоординатная гидравлическая следящая система отличается от известных тем, что серводвигателям внутри системы параллельно сообщается корректирующее управление, пропорциональное погрешности от одного невращающегося щупа, которое приближенное направление результирующей скорости подачи, полученной по «каналу регулирования», совмещает с направлением касательной к контуру в точке копирования. Это обеспечивает повышение точности и скорости копирования при обработке замкнутых контуров произвольной формы плоских деталей, а при добавлении периодической подачи на строчку позволяет автоматически, копировать объемные, поверхности.
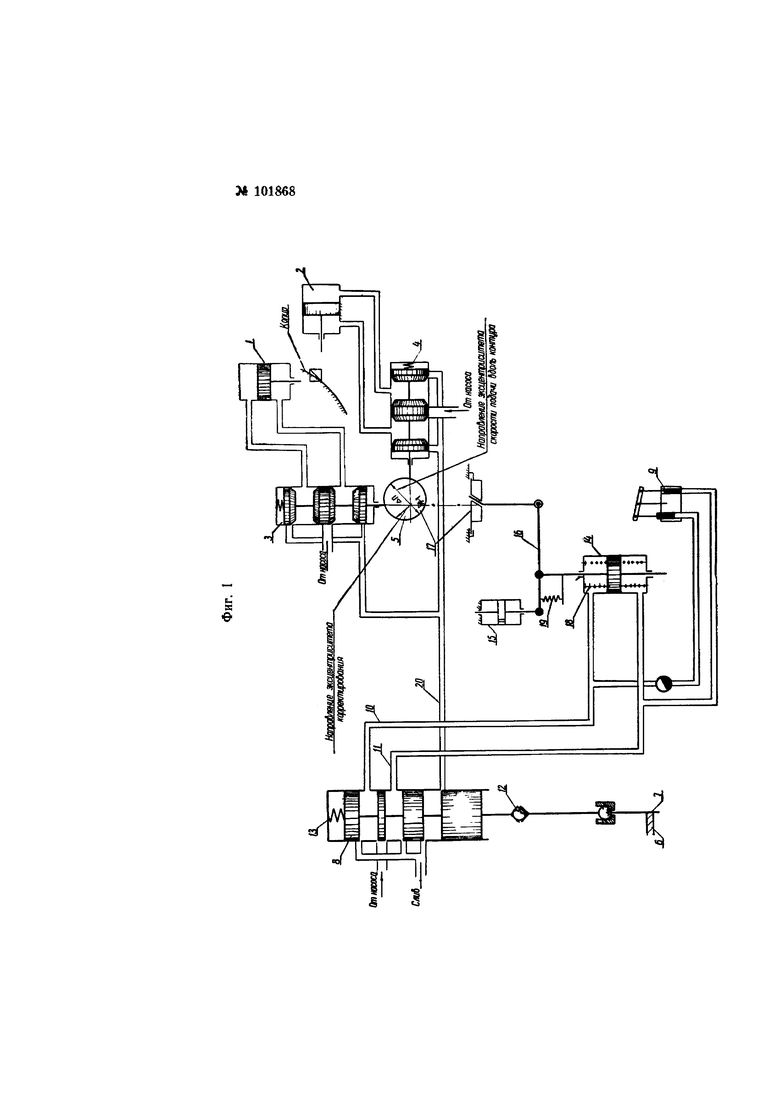
На фиг. 1 изображена гидравлическая схема следящей системы; на фиг. 2 - схема копирования.
Серводвигателями (1) и (2) системы, приводящими в движение исполнительный орган по двум взаимно перпендикулярным направлениям, управляют два дроссельные реверсивные золотника (3) и (4) с конусными шейками, образующие совместно с двойным эксцентриком (5) синусный датчик. Двойной эксцентрик состоит из внешней и внутренней пар совмещенных эксцентриковых втулок с перпендикулярным расположением эксцентриситетов.
В положении, когда эксцентриситет внешней пары втулок двойного эксцентрика (5) относительно оси вращения равен нулю, золотники находятся в среднем положении и масло в серводвигатели (1) и (2) не поступает. Эксцентриситет внешней пары втулок может изменяться вручную или механически, при этом внешнее кольцо двойного эксцентрика смещается относительно оси вращения. Величина этого эксцентриситета Δn пропорциональна смещению кольца, а направление эксцентриситета, автоматически управляемое невращающимся щупом в процессе обвода контура копира (6), приблизительно совпадает с направлением касательной к контуру копира в точке контакта с невращающимся щупом (7). В результате золотникам (3) и (4) сообщаются отклонения от среднего положения, пропорциональные синусу и косинусу угла наклона касательной в контуру и направлению выбранной системы координат. Приблизительно такое же соотношение имеется между потоками масла, поступающими из золотников в серводвигатели и создающими скорости υпод1 и υпод2 подачи. Результирующая скорость υпод подачи вдоль контура при его обводе невращающимся щупом (7) постоянна по величине и определяется величиной эксцентриситета Δn и его направлением, которое близко к касательной в данной точке. Управление направлением эксцентриситета осуществляется автоматически от невращающегося щупа (7) посредством командного золотника (8) и гидродвигателя (9) следующим образом. В среднем положении золотника щели между его кромками и пазами в корпусе и давления в трубопроводах (10) и (11) одинаковы. При отклонении щупа (7) от вертикального положения шарик (12) приподнимает золотник (8), преодолевая усилие пружины (13).
При движении щупа со скоростью υпод он удаляется от контура копира, а золотник (8) перемещается из среднего положения вниз. При этом давление в трубопроводе (10) повышается, а в трубопроводе (11) понижается. В результате гидродвигатель (9) поворачивает двойной эксцентрик против часовой стрелки, располагая направление скорости подачи υпод влево от направления касательной и приближая щуп к контуру копира. Командный золотник (8) при этом поднимается вверх. После его перехода через среднее положение давление в трубопроводе (11) начинает превышать давление в трубопроводе (10), вращение гидродвигателя (9) реверсируется и двойной эксцентрик поворачивается по часовой стрелке, вновь приближая направление скорости подачи υпод к направлению касательной к контуру копира. Таким образом, при обводе замкнутого контура направление скорости υпод автоматически колеблется около направления касательной.
Для устранения таких колебаний и повышения точности копирования в следящую систему введено корректирующее управление, осуществляемое двойным эксцентриком (5) от щупа (7), посредством командного золотника (8) и гидроусилителя, состоящего из гидроцилиндра (14) с подпружиненным штоком катаракта (15), рычажной передачи (16) и внутренней пары втулок (17) двойного эксцентрика (5). Гидроусилитель обеспечивает увеличение на расстоянии без жесткой передачи величины линейного перемещения 'командного золотника (погрешности копирования) и первой производной от этого перемещения. Внутренней паре втулок (17) сообщается смещение от среднего положения, соответствующее по величине и знаку (в контур или от контура копира) отклонению от среднего положения щупа.
В результате внешнее кольцо двойного эксцентрика получает дополнительно эксцентриситет ±Δк расположенный под углом 90° к эксцентриситету подачи Δn и серводвигателям (1) и (2) автоматически сообщаются скорости υкор1 и υкор2. Результирующая скорость корректирования υкор складывается геометрически со скоростью υпод и дает скорость υ0, совпадающую в любой точке контура копира с направлением касательной. Корректирующее управление по первой производной осуществляется от штока катаракта (15) следующим образом. При медленном отклонении щупа от среднего положения поршень гидроцилиндра (14) тоже медленно перемещается от среднего положения, например, вверх, сжимая пружину (18). При этом рычаг (16), удерживаемый пружиной (19) под прямым углом к оси поршня, перемещает внутреннюю втулку двойного эксцентрика и поршень катаракта (15) на величину и со скоростью смещения поршня цилиндра (14). Из верхней полости катаракта (15) масло перетекает через дроссель в его поршне в нижнюю полость.
Сопротивление протеканию жидкости через дроссель пропорционально скорости протекания, а значит, и скорости перемещения поршня катаракта (15). Поэтому при возрастании скорости отклонения щупа от среднего положения, перемещения поршня катаракта начинают отставать от перемещения поршня цилиндра (14). Отставание тем больше, чем выше скорость. В результате внутренняя втулка (17) дополнительно перемещается по отношению к поршню цилиндра (14).
Жидкость из серводвигателей (1) и (2) сливается по трубопроводу (20) через золотник (8). При небольшом отклонении золотника от среднего положения вверх или вниз проход жидкости уменьшается или прекращается совсем. Это позволяет при обводе крутых участков контура копира, например, внутренних прямых углов, и при значительном отклонении направления скорости подачи от направления касательной автоматически снижать скорость подачи.
1. Двухкоординатная гидравлическая следящая система для автоматического копирования замкнутых контуров произвольной формы путем одновременного управления по «каналу регулирования» двумя серводвигателями, осуществляющими продольные и поперечные подачи, с распределением рабочей среды в них золотниками, получающими перемещение от эксцентрика, поворачиваемого гидродвитателем, управляемым командным золотником, который получает перемещения от щупа, отличающаяся тем, что, с щелью повышения точности и скорости копирования, серводвигателям внутри системы параллельно сообщается корректирующее управление, пропорциональное погрешности от одного невращающегося щупа, которое приближенное направление результирующей скорости подачи, полученной по «каналу регулирования», совмещает с направлением касательной к контуру в точке копирования.
2. Форма выполнения системы по п. 1, отличающаяся тем, что, с целью, автоматического геометрического сложения управлений, по «каналам регулирования и корректирования» и передачи этих управлений, распределенных по закону синуса и косинуса на два золотника серводвигателей, применен эксцентрик из парных совмещенных эксцентриковых втулок с взаимно перпендикулярным направлением эксцентриситетов.
3. Форма выполнения системы по пп. 1 и 2, отличающаяся тем, что, с целью увеличения на расстоянии без жесткой передачи величины линейного перемещения командного золотника (погрешности), применен гидроусилитель в виде гидравлического цилиндра с; подпружиненным поршнем, управляемый золотником и передающий эксцентрику корректирующее перемещение, пропорциональное перемещению командного золотника (погрешности).
4. Форма выполнения системы по пп. 1 и 3, отличающаяся тем, что, с целью повышения точности копирования путем введения в «канал корректирования» управления по первой производной линейного перемещения командного золотника (погрешности), к штоку поршня гидроусилителя присоединен гидравлический катаракт с рычажной передачей к эксцентрику.
