Предметом изобретения является полуавтомат для загибки деталей, например, для изделий галантерейной промышленности.
Все загибочные операции в этом производстве до последнего времени выполняются, в основном, вручную, что требует больших затрат труда и отражается на качестве продукции.
С целью увеличения производительности труда и улучшения качества продукции, предлагается полуавтомат для загибки массовых деталей, механизируюший и частично автоматизирующий этот процесс.
Его особенность заключается в том. что он состоит из монтированных на станине механизмов включения полуавтомата, прижима детали, раздвижных шаблонов, загибки и механизма подъема и опускания стола, приводимых в движение от эксцентриков, монтированных на главном валу полуавтомата.
Механизм для прижима деталей выполнен в виде жестко закрепленного на станине кронштейна с перемещаемым в нем в вертикальной плоскости шпинделем, один конец которого связан с подпружиненным пуансоном, а другой - с закрепленным на кронштейне двуплечим рычагом, взаимодействующим со штоком, получающим перемещение от эксцентрика.
Механизм раздвижных шаблонов для загибки деталей с четырех сторон выполнен в виде четырех монтированных над пуансоном подпружиненных пластин, получающих перемещение в горизонтальной плоскости от конического пальца, монтированного на щпинделе.
Механизм загибки выполнен в виде четырех получающих переме дение в горизонтальной плоскости пластин, взаимодействующих каждая с одним плечом двуплечего рычага, другой конец которого несет ролик, взаимодействующий с пазом эксцентрика.
Механизм подъема и опускания стола выполнен в виде подпружиненной фигурной металлической плиты, несущей ролик, взаимодействующий с эксцентриком.
№ 114461- 2 -
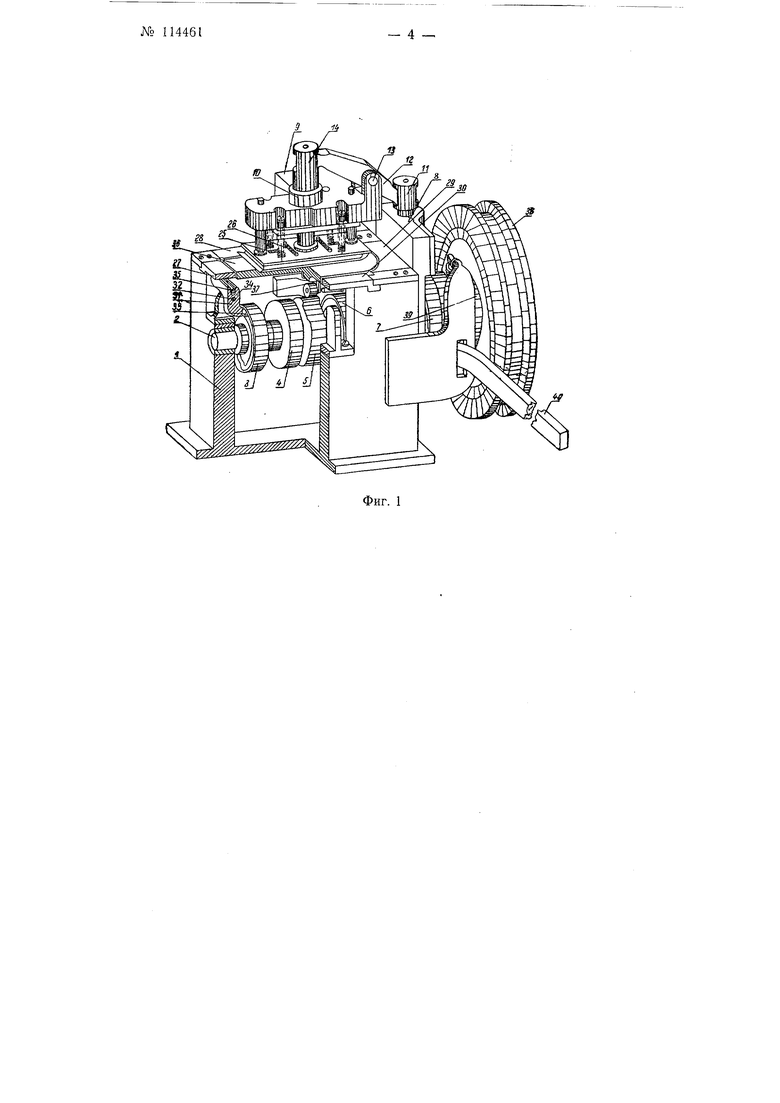
На фиг. 1 изображен полуавтомат; на фиг. 2 - механизм для прижима деталей; на фиг. 3 - раздвижные шаблоны.
Описываемый полуавтомат предназначен для загибки четырех сторон пуховки женской сумки. На станине / монтирован вал 2 с наса1женными на нем эксцентриками 3, 4, 5, 6 н 7. Кроме того, один эксцентрик скрыт за станиной и на фигуре не показан. На -станине оправа укреплена направляющая 8, а сзади кронштейн 9 с насаженной на нем втулкой 10.
В направляющей 8 возвратно-поступательно перемещается в вертикальном направлении шток //, получающий движение от эксцентрика 7 при помощи ролика, иасал енпого на нижнем конце штока (на фиг. не показано). Верхний конец штока 7/ взаимодействует с рычагом 12 качающимся относительно оси 13, монтированной на кронштейне 9. Другой конец рычага взаимодействует со шпинделем 14, возвратно-поступательно перемещающимся во втулке 10 в вертикальной плоскости. Нижний конец шпинделя 14 связан с подпружиненным пуансоном, состоящим из двух скрепленных между собой с зазором пластин 15 и 16. Для связи служат ввернутые в пластину 15 щпильки 17 с надетыми на них пружинами 18. Шпильки . свободно проходят сквозь отверстия, сделанные во фланце 19 шпинделя 14, а сверху снабжены упорными винтами 20 со втулками.
В пластину 15 ввернуты колонки 21 перемещающиеся в направляющих втулках 22, укрепленных в кронштейне 9Во внутренней выточке шпинделя 14 укреплен палец 23, нижний конец которого имеет коническую форму и взаимодействует с четырьмя раздвижными шаблонами 24 (четвертый шаблон на фиг.-не показан), монтиро-ванными в зазоре между пластинами 15 и 16 пуансона. Раздвижные ш аблоны попарно связаны между собою пружинами 25 и 26.
Механизм загибки состоит из четырех пластин 27, 28, 29 и 30, возвратно-поступательно перемещающихся в горизонтальной плоскости. Калодая из четырех пластин получает движение от одного из трех эксцентриков 3, 4, 6 и четвертого, не показанного на фиг., посредством рычага 31, качающегося па оси 32 и снабженного на одном конце роликом 33, взаимодействующим с пазом эксцентрика, а на другом конце - вилкой 34, взаимодействующей с выступом 35, укрепленным снизу каждой из пластин для загибки.
Механизм подъема и опускания стола выполнен в виде подпружиненной фигурной плиты 36, несущей ролик 37, взаимодействующий с эксцентриком 5. Стол снабжен пружинами (па фиг. не показаны), прижимающими ролик 37 к эксцентрику 5Рабочие органы получают движение при помощи свободно насаженного на валу 2 шкива 38 и жестко закрепленной на том же валу муфты 39. Для включения служит рукоятка 40.
Работа полуавтомата производится следующим образом. Раскроенную по шаблону деталь, у которой кромки предварительно смазаны клеем, укладывают на плиту 36 до упоров, монтированных на пластиках 27, 28 и 29. При помощи рукоятки 40 включают полуавтомат в работу. Вал 2, получая вращение от шкива 38 при помощи муфты 39, заставляет вращаться эксцентрики 3, 4, 5, 6, 7 и непоказаниый на фиг. эксцентрик. Шток 11, взаимодействующий с эксцентриком 7, поднимается вверх, а шпиндель 14 при помощи рычага 12 опускается вниз. Вместе с ним опускаются вниз тластины 15 и 16, связанные со шпинделем пружинами 18. Пластина 16 упирается в уложенную на плите 36 деталь и зажимает ее. При дальнейшем движении шпинделя 14 вниз пружины 18 сжимаются, а палец 23 входит коническим концом в зазор между четырьмя шаблонами 24 и раздвигает их до тех пор, пока их внешние
кромки не дойдут до места загибки детали. Вслед за этим подпружиненная плита 36 вместе с зажатой деталью начинает опускаться вмиз при помощи эксцентрика 5 и ролика 37. Вместе с ней продолжают опускаться В1П13 и шпиндель 14 с раздвинутыми шаблонами 24. При опускании плиты кромки детали загибаются пластинами 27, 28, 29 и 30 приблизительно на 90°.
Когда плита 36 с зажатой деталью займет крайнее нижнее положение, пластины 28 я 50, а вслед за ними пластины 27 и 29 начинают перемеш аться в горизонтальной плоскости навстречу друг другу при помощи эксцентриков 3, 4, 6, роликов 33 и рычагов 31 и перегибать кромки детали через внешние кромки раздвинутых шаблонов 24.
После этого шпиндель 14 начинает перемещаться вверх. Конический конец пальца 23 выходит из зазора между шаблонами 24. Последние при помощи пружин 25 и 26 сближаются между собой и выходят из загнутых кромок детали- Плита 36 поднимается вверх и зажимает загнутые кромки между собой и выдвинутыми пластинами 27, 28, 29 и 30. После некоторой паузы, необходимой для склеивания загнутых кромок детали, плита 36 несколько опускается вниз, давая возможность пластинам 27. 28, 29 и 30 переместиться обратно в исходное положение. Затем плита поднимается вверх до исходного верхнего положения. Шпиндель 14, поднимаясь вверх, освобождает готовую деталь. Последнюю снимают с плиты 36 и укладывают для загибки следующую.
Предмет изобретения
1.Полуавтомат для загибки деталей, например, для изделий кожевенной галантереи, отличающийся тем, что, € целью увеличения производительности труда и улучшения качества продукции, он состоит из монтированных на станине механизмов включения пoлyaвтo taтa, прижима детали, раздвижных шаблонов, загибки и механизгла по.Г- ::.:;. и опускания стола, приводимых в движение от эксцентриков, мо1 тированных на главном валу полуавтомата.
2.Форма выполнения полуавтомата по п. 1, отличающаяся тем, что механизм для прижима деталей выполнен в виде жестко закрепленного на станине кронштейна с перемещаемым в нем в вертикальной плоскости шпинделем, один конец которого связан с подпружиненным пуансоном, а другой конец связан с закрепленным на кронштейне двуплечим рычагом, взаимодействующим со штоком, получающим перемещение от эксцентрика.
3.Форма выполнения полуавтомата по п. 1, отличающаяся тем, что, с целью загибки детали с четырех сторон механизм раздвижных шаблонов выполнен в виде четырех монтированных над пуансоном подпружиненных пластин, получающих перемещение в горизонтальной плоскости от конического пальца, монтированного на шпинделе.
4.Форма вьшолнения полуавтомата по п. 1, отличающаяся тем, что механизм загибки выполнен в виде четырех получающих перемещение в горизонтальной плоскости пластин, взаимодействующих каждая с одним плечом двуплечего рычага, другой конец которого несет ролик, взаимодействующий с пазом эксцентрика.
5.Форма выполнения полуавтомата по п. 1, отличающаяся тем, что механизм подъема и опускания стола выполнен в виде подпружиненной фигурной металлической плиты, несущей ролик, взаимодействующий с эксцентриком.
да
ss
k