(54) УСТРОЙСТВО ДЛЯ УЧЕТА ВРЕМЕНИ РАБОТЫ РОТОРНОГО ЭКСКАВАТОРА
1
Изобретение о.тносится к автоматизации горнотранспортных машин для открытых горных работ и может быть использовано как на вскрышных, так и добычных роторных экскаваторах.
ИзвестнЪ устройство учета времени работы роторного экскаватора, содержащее генератор импульсов, датчики состояния приводов роторного колеса и поворота верхнего строения экскаватора, логическую схему, коммутатор и подключенный к его выходу счетчик времени работы 1.
Недостатками этого устройства явл ются недостаточная точность учета времени работы роторного экскаватора, низкая надежность учета вследствие реализации однозначной логической функции и то, что оно ведет учет времени только той части технологического цикла, когда роторное колесо экскавирует горную массу.
Наиболее близким по технической сути к изобретению является устройство учета времени работы роторного экскаватора с рельсово-шагающим ходовым оборудованием, оснащенного механизмами подъема и опускания базы, подъема и опускания лыж, перемещения лыж, разворота и пере,. 2
мещения экскаватора по лыжам, содержа-, щее генератор импульсов, блоки контроля состояния приводов роторного колеса, приводов конвейерной линии, поворота верхнего строения экскаватора; подъема и опус5 кания роторной стрелы, ходового оборудования с датчиками перемещения экскаватора вперед и назад по лыжам, подключенным к логическому элементу ИЛИ, логическую схему ИЛИ, коммутатор и подключенные к его выходам блоки учета суммарного времени работы и времени простоя 2.
Устройство характеризуется недостаточной точностью учета времени работы роторного экскаватора, так как в нем не предусмотрен точный учет времени, затрачиваемого
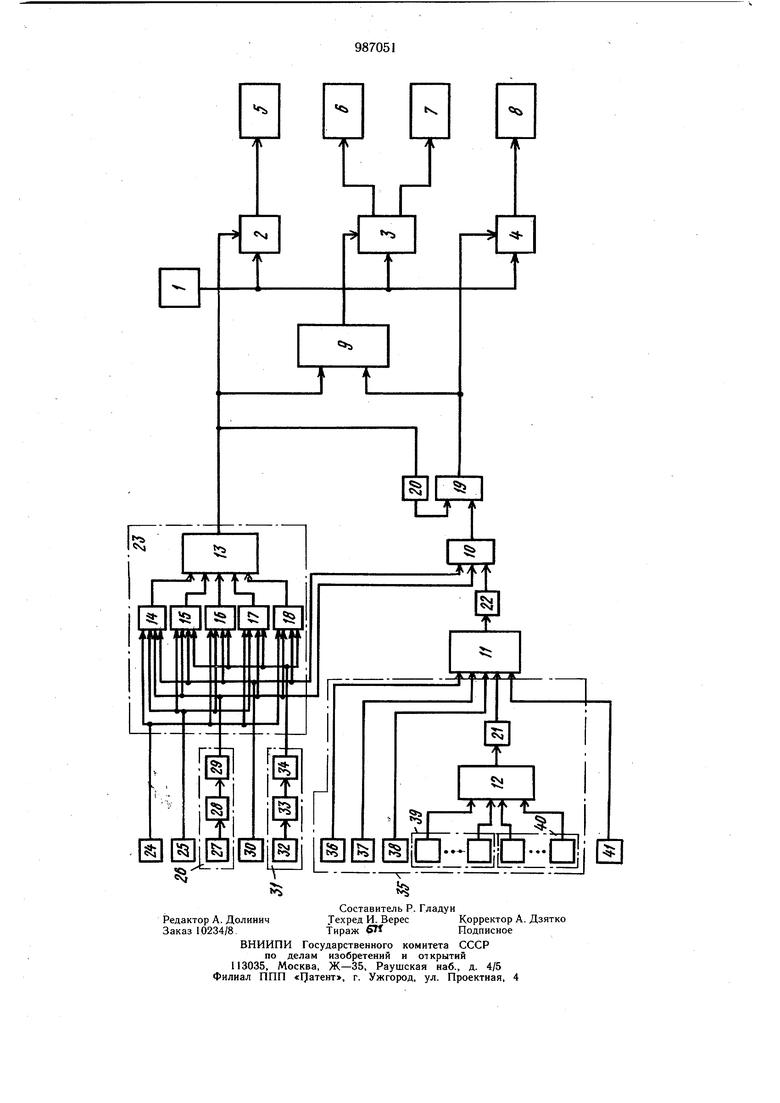
15 на реверс привода поворота верхнего строения экскаватора, надежностью учета вследствие реализации однозначной логической функции. Кроме того, оно не обеспечивает дифференцированного учета времени непосредственной работы, т. е. когда экскаватор экскавируют горную массу, и времени выполнения, вспомогательных технологических операций, таких как переходы от реза к резу, переходы от слоя к слою, перемещение ротора в начальную точку для обработки следующего блОка, информация ,о которых -содержит много сведений о режимах использования экскаватора и его отдельных агрегатов. Цель изобретения - повышение точности и надежности учета времени работы роторного экскаватора. Эта цель достигается тем, что устройство учета времени работы роторного экскаватора с рельсово-шагающим ходовым оборудованием, оснащенного механизмами подъема и опускания базы, подъема и опускания лыж, перемещения лыж, разворота и перемещения экскаватора по лыжам, содержащее генератор импульсов, блоки крнтроля состояния приводов роторного колеса, приводов конвейерной, линии, поворота верхнего строения экскаватора, подъема и опускания роторной стрелы,, ходового оборудо-. вания с датчиками перемещения экскаватора вперед и назад по лыжам, подключенными к логическому элементу ИЛИ, логическую схему ИЛИ, коммутатор и подключенные к его выходам блоки учета суммарного времени работы и времени простоя, снабжено блоком учета времени непосредственной работы, блоком учета времени выполнения вспомогательных технологических операций, блоком контроля интенсивности потока материала на конвейере, блоком контроля режима поворота верхнего строения экскаватора, блоком мажоритарного выбора, логическим элементом НЕ, двумя логическими элементами ИЛИ, двумя коммутаторами, элементом вре менной задержки, а блок контроля состояния ходового оборудования снабжен датчиком состояния привода разворота, датчиками состояния электромагнитов золотников каждого из цилиндров гидросистемы подъема и опускания базы и подъема и опускания лыж экскаватора и элементом временной задержки, причем выходы датчиков состояния электромагнитов золотников гидросистемы подъема и опускания лыж и подъема и опускания базы экскаватора подключены на вход логического элемента ИЛИ, к выходу которого подключен элемент временной задержки, выходы блоков контроля состйяния приводов роторного колеса, конвейерной линии, поворота верхнего строения экскаватора, контроля интенсивности потока цатериала на конвейере и контроля режима поворота верхнего строения экскаватора подключены ко входам мажоритарного выбора, один выход которого соединен с,,входом логического элемента НЕ,; первым входом логической схемы ИЛИ и с одним из входов второго коммутатора, через второй вход которого и через второй вход третьего коммутатора генератор импульсов подключен соответственно к блокам учета времени непосредственной работы и учета времени выполнения вспомогательных технологических операций, вход управления третьего коммутатоla соединен с выходом логического элемента ко входам которого подключены выходы логического элемента НЕ и первого логического элемента ИЛИ, к третьим входам которого подключены второй и третий выходы блока мажоритарного выбора и через блок временной задержки выход второго логического элемента ИЛИ, к входам которого подключены выходы блока контроля ходового оборудования и блока контроля состояния привода подъема и опускания роторной стрелы. Кроме того, блок контроля интенсивности потока материала на конвейере выполнен в виде последовательно соединенных измерителя интенсивности потока, частотнои.мпульсного модулятора и частотного дискриминатора. Блок мажоритарного выбора выполнен в виде логического элемента ИЛИ и соединенных в соответствии с мажоритарной логической функцией «четыре из пяти логических элементов И, выходами подключенных ко входам логического элемента ИЛИ, а блок контроля режима поворота верхнего строения экскаватора выполнен в виде последовательно соединенных измерителя скорости поворота, дифференцирующего элемента и порогового элемента. Введение блока контроля режима поворота верхнего строения экскаватора позволяет точно определить время снижения скорости верхнего строения экскаватора от установившегося значения до нуля и время возрастания скорости поворота от нуля до установившегося значения, а также любые режимы изменения скорости в процессе отработки реза. Таким образом, сочетание блока контроля режима поворота верхнего строения экскаватора с блоком контроля состояния привода поворота верхнего строения экскаватора позволяет определить точное время отработки реза или время поворота верхнего строения экскаватора при выполнении вспомогательных технологических операций. Введение в блок контроля состояния приводов ходового оборудования датчика состояния привода разворота лыж относительно базы экскаватора и датчиков состояния электромагнитов золотников каждого из цилиндров гидросистемы подъема и опускания базы экскаватора и подъема и опускания лыж обусловлено применением рельсощагающего ходового оборудования. На чертеже приведена структурная схема устройства. Устройство для учета времени работы роторного экскаватора с рельсощагающим ходовым оборудованием включает в себя генератор 1 импульсов, коммутаторы 2, 3 и 4, блок 5 учета времени непосредственной работы, блок б учета, суммарного времени работы, блок 7 учета времени простоев.
блок 8 учета времени выполнения вспомогательных технологических операций, логические элементы ИЛИ 9-13, логические элементы И 14-19, логический элемент НЕ 20, первый элемент 21 временной задержки, второй элемент 22 временной задержки, блок 23 мажоритарного выбора, блок 24 контроля состояния привода ротора, блок 25 контроля состояния приводов конвейерной -ЛИНИИ, блок 26 контроля режима поворота нижнего строения эскаватора, измеритель 27 скорости поворота, дифференцирующий элемент 28, пороговый элемент 29, блок 30 контроля состояния привода поворота верхнего строения эскаватора, блок 31 контроля интенсивности потока материала на конвейере, измеритель 35 интенсивности потока, частотно-импульсный модулятор 33, частотный дискриминатор 34, блок 35 контроля состояния приводов ходового оборудования, датчик 36 перемещения эскаватора вперед, датчик 37 перемещения эскаватора назад, датчик 38 состояния привода разворог та лыж относительно базы эскаватора, датчики 39 состояния электромагнитов золотников каждого из цилиндров гидросистемы подъема и опускания базы, датчики 40 состояния электромагнитов золотников каждого из цилиндров гидросистемы подъема и опускания лыж, блок 41 контроля состояния привода подъема и опускания роторной стрелы.
Блоки контроля состояния указанных приводов формируют следующую информацию о приводе: привод включен,-что соответствует наличию на выходе блока логической «1, привод выключен - логическому «О.
Блок контроля режима поворота верхнего строения эскаватора выполнен в виде последовательно соединенных измерителя скорости поворота, диффе)енцирующего элемента и порогового элемента. Он формирует, информацию об изменении скорости поворота верхнего строения экскаватора во время реверса или остановки привода поворота по ее производной. Изменение скорости .соответствует наличию на выходе блока логической «1 при постоянной скорости или при равенстве ее нулю .логическому С целью исключения влияния электрического сигнала, соответствующего пренебрежительно малым изменениям производной, к выходу дифференцирующего элемента подключен пороговый элемент, на выходе которого получаем сигнал уровня логической «1, если уровень сигнала на его входе выще уровня заданного порога.
Блок контроля интенсивности потока материала на конвейере выполнен в виде последовательно соединенных измерителя интенсивности потока, частотно-импульсного модулятора и частотного дискриминатора. Он формирует сигнал о режиме работы конвейерной линии. Если количество материала на ленте превосходит наперед заданное минимальное пороговое значение, то на выходе блока будет сигнал уровня логической «1.
Блок мажоритарного выбора выполнен в виде соединенных в соответствии, с, мажоритарной логической функцией «четыре .из
пяти логических элементов И, связанных с логическим элементом ИЛИ.
Значение выдержки времени первого элемента временной задержки выбрано равным величине математического ожидания времен технологических пауз между операциями
опускания базы и подъема лыж или опускания лыж и подъема базы, а значение выдержки времени второго элемента временной задержки равна математическому ожиданию времен, необходимых на переключение приводов при выполнении вспомогательных технологических операций.
Логические элементы И, ИЛИ, НЕ соединены между собой и блоками контроля таким образом, что на управляющие входы соответствующих коммутаторов подается
сигнал уровня логической «1 только во время непосредственной работы роторного эскаватора или при выполнении им вспомогательных технологических операций.
Устройство работает следующим обра ° Генератор 1 импульсов вырабатывает импульсы стабильной частоты. При непосредственной обработке блока на управляющий вход коммутатора 2 с выхода логического элемента ИЛИ, входящего в состав блока
23 мажоритарного выбора, поступает логическая « 1 , которая обусловливает подключение коммутатором выхода генератора I импульсов ко входу,блока 5 учета времени непосредственной работы.
При выполнении вспомогательных технологических операций на управляющий вход коммутатора 4 с выхода логического элемента И 19 поступает логическая «1, которая обусловливает подключение коммутатором 4 выхода генератора 1 импульсов ко входу блока 8 учета времени выполнения вспомогательных технологических операций.
При поступлении на один из входов логического элемента ИЛИ 9 логической «1 .на управляющий вход коммутатора 3 поступает сигнал уровня логической «1, который обусловливает подключение коммутатором выхода генфатора 1 импульсов ко входу блока 6 суммарного времени работы. При наличии же на обоих входах логиЧес-, кого элемента ИЛИ 9 уровня логического «и, что свидетельствует о том, что не выполняется ни одна из названных технологических операций, на управляющий вход коммутатора 3 поступает сигнал уровня логического «О, который обусловливает подключение коммутатором .3 выхода генерато- . ра 1 импульсов ко входу блока 7 учета времени простоев.
Количество импульсов, поступивщих на вход блока 5, пропорционально времени непосредственной работы, на вход блока
8 - времени выполнения вспомогательных технологических операций, на вход блока 6 - суммарному времени работы, на вход блока 7 - времени простоя
Данное устройство повышает точность учета времЬни работы роторного эскаватотора за счет введения блока контроля режима поворота верхнего строения экскаватора и блока мажоритарного выбора; обеспечивает дифференцированный учет времени непосредственной работы и времени выполнения вспомогательных технологических операций; увеличивает коэффициент использо.вания эскаватора во времени за счет автоматического оперативного учета фактического времени работы, .непроизводительных простоев, улучшает организацию эксплуатации, дает информацию для рационального планирования профилактических и ремонтных работ на основе фактических данных об эксплуатации оборудования.
Формула изобретения
Устройство для учета времени работы роторного экскаватора с рельсово-шагающим ходовым оборудованием, оснаш,енного механизмами подъема и опускания базы, подъема и опускания лыж, перемещения лыж, разворота и перемещения эскаватора по лыжам, содержащее генератор импульсов блоки контроля состояния приводов роторного колеса, приводов конвейерной линии, поворота верхнего строения экскаватора, подъема и опускания роторной стрель, ходового оборудования с датчиками перемещения экскаватора вперед и назад по лыжам, подключенными к логическому элементу ИЛИ, логическую схему ИЛИ, коммутатор и подключенные к его выходам блоки учета суммарного времени работы и времени простоя, отличающееся тем, что, с целью повышения точности и надежности учета времени работы, оно снабжено олоком учета времени непосредственной работы, блоком учета времени выполнения вспомогательных технологических операций, блоком контроля интенсивности потока материала на конвейере, блоком контроля режима поворота верхнего строения экскаватора, блоком мажоритарного выбора, логическим элементом НЕ, двумя логическими элементами ИЛИ, двумя коммутаторами, элементов временной задержки, а блок контроля состояния приводов ходового оборудования снабжен датчиком состояния привода разворота, датчиками состояния электромагнитов золотников каждого из цилиндров гидросистемы подъема и опускания базы и подъема и опускания лыж экскаватора и элементом временной задержки, причем выходы датчиков
СОСТОЯНИЯ электромагнитов затотников гидросистемы подъема и опускания лыж и подъема и опускания базы экскаватора подключены на вход логического элемента ИЛИ, к выходу которого подключен элемент временной задержки, выходы блоков контроля состояния приводов роторного колеса, конвейерной линии, поворота верхнего строения экскаватора, контроля интенсивности потока материала на конвейере и контроля режима
.. поворота верхнего строения экскаватора подключены к входам блока мажоритарного выбора, один выход которого соединен с входом логического элемента НЕ, первым входом логической схемы ИЛИ и с одним из входов второго коммутатора, через второй
вход которого и через второй вход третьего коммутатора генератор импульсов подключен соответственно к блокам учета времени непосредственной работы и учета времени выполнения вспомогательных технологических операций, вход управления третьего коммутатора соединен с выходом логического элемента И, к входам которого подключены выходы логического элемента НЕ и первого логического элемента ИЛИ, к трем входам которого подключены второй и третий в-ы5 ходы блока мажоритарного выбора и через блок временной задержки выход второго логического элемента ИЛИ, к входам которого подключены выходы блока контр.оля ходового оборудования и блока контроля состояния привода подъема и опускания ро0 торной стрелы.
2.Устройство по п. 1, отличающееся тем, что блок контроля интенсивности потока материала на конвейере выполнен в виде последовательно соединенных измерителя интенсивности потока, частотно-импульсного
5 модулятора и частотного дискриминатора.
3.Устройство по п. 1, отличающееся тем, что блок мажоритарного выбора выполнен в виде,логическогоэлемента ИЛИ и соединенных в соответствии с мажоритарной лоQ гической функцией «четыре из пяти логических элементов И, выходами подключенных к входам логического элемента ИЛИ.
4.Устройство по п. , отличающееся тем, что блок контроля режима поворота верхнего строения экскаватора выполнен в виде
5 последовательно соединенных измерителя скорости поворота, дифференцирующего элемента и порогового элемента.
Источники информации, принятые во внимание при экспертизе . Пуго А. М. и др. Контроль времени работы роторных экскаваторов. - Применение роторных комплексов на карьерах КМА. Сб. трудов НИИКМА, Губкин, 1969, № 6, с. 88--93. .,
2 . Авторское свидетельство СССР 5 № 644919, кл. Е 02 F 9/20, 1979 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и учета работы добычного роторного экскаватора | 1983 |
|
SU1145089A1 |
| Радиотелеметрическое устройство контроля и учета работы шагающего экскаватора | 1987 |
|
SU1472573A1 |
| Устройство для управления экскаватором типа "прямая лопата | 1983 |
|
SU1113490A1 |
| Шагающее ходовое оборудование | 1987 |
|
SU1447999A1 |
| Роторный экскаватор | 1987 |
|
SU1530678A1 |
| Роторный экскаватор специального назначения | 2024 |
|
RU2834251C1 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1971 |
|
SU293968A1 |
| Устройство для управления роторным экскаватором при планировке рабочей площадки | 1981 |
|
SU1040051A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |