1
Изобретение относится к автоматическому регулированию и может быть использовано при создании систем управления тепловыми, химическими, электромеханическими и другими объектами.
Известные системы автоматического регулирования, содержащие регулируемый объект, усилительно-преобразовательное устройство, соединенное с объектом, первый элемент сравнения, подключенный к выходу объекта, второй элемент сравнения, выход которого связан со входом усилительно-преобразовательного устройства, и заноминающий элемент, характеризуются значительным перерегулированием и временем затухания переходных процессов.
Цель изобретения - повышение качества переходных процессов в системе.
Это достигается благодаря тому, что система дополнительно содерл ит два безынерционных блока, выходы которых подключены к входам элемента сравнения, связанного с входом усилительно-преобразовательного устройства; кроме того, в систему включены соединенные последовательно фильтр и нульорган, выход которого подключен к управляющему входу запоминающего элемента, связанного с входом первого безынерционного звена, причем выход элемента сравнения, подключенного к выходу объекта, соединен со
входами фильтра, запоминающего элемента и второго безынерционного звена. Такое построение системы дает возможность при соответствующей настройке коэффициентов передачи безынерционных звеньев получать быстрозатухающие переходные процессы без перерегулирования.
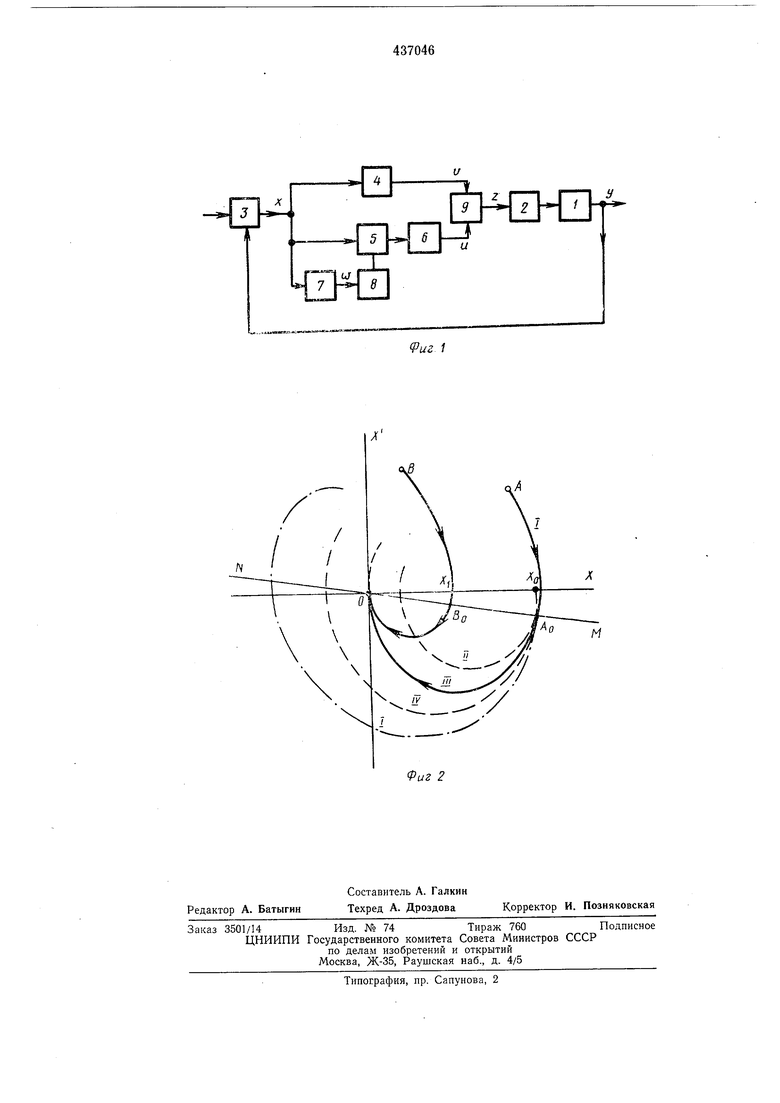
На фиг. 1 представлена структурная схема
предлагаемой системы автоматического регулирования; на фиг. 2 - фазовый портрет системы.
Предлагаемая система автоматического регулирования состоит из регулируемого объекта 1, усилительно-преобразовательного устройства 2, элемента 3 сравнения, выход которого подключен к входам безынерционного блока звена 4, запоминающего элемента 5, соединенного последовательно с безынерционным блоком 6, и фильтра 7. К управляющему входу запоминающего элемента 5 подключен нуль-орган 8, вход которого соединен с выходом фильтра 7. Выходы безынерционных блоков-звеньев 4 и 6 соединены с входами
элемента 9 сравнения, выход которого подключен к входу усилительно-преобразовательного устройства 2.
Система работает следующим образом. Рассогласование системы х, формируемое
элементом 3 сравнения, действует одновременно на входе безынерционного звена 4, запоминающего элемента 5 и фильтра 7. Безынерционное звено 4 имеет коэффициент передачи р и изменяет лишь масштаб сигнала X. Запоминающий элемент производит фиксацию X в моменты, когда равен нулю сигнал W, полученный после прохождения рассогласования х через фильтр 7. Моменты равенства этого сигнала нулю фиксируются нуль-органом 8, который в эти моменты выдает сигнал на управляющий вход запоминающего элемента 5. Зафиксированное значение поддерживается постоянным до следующего момента запоминания, после чего выходной сигнал запоминающего элемента скачком переходит к новому зафиксированному значению. В результате рассогласование х преобразуется запоминающим элементом и безынерционным звеном 6 в кусочно-постоянный сигнал и. Таким образом, для отрезка времени между двумя запоминающими ti; ti+i для сигнала Z можно записать: Z(t)(t)o..x(ii), где ti-моменты запоминания (, 1, 2,...); x(ti)-постоянные на отрезке времени tij ti+i зафиксированные значения рассогласования;а - коэффициент передачи звена 6. Пусть объект 1 и усилительно-преобразовательное устройство 2 описываются дифференциальным уравнением вида: y + by K,-Z, где /Со и 6 - постоянные числа; y dyldt; y dyldt Рассмотрим свободное движение системы нод действием начальных отклонений t/(0); У (0). Тогда рассогласование системы будет равно , и уравнение замкнутой системы примет вид: л 4-6. - АГо IP-JC - ,) или .x+K-x (lt), гдеЯ р-/Со. Пусть выходной сигнал w фильтра 7 формируется по рассогласованию х и его скорости х следующим образом: w ,(2) где а - постоянное число. Если система находилась в покое (), то ш 0, и в запоминающем устройстве происходит фиксация нулевого рассогласования, поэтому . Если же в некоторый момент времени, который примем за нулевой, в системе возникло начальное отклонение л:(0)-г/(0); х (0) -/(0), то в общем случае (x(Q)(О) ) запоминания не происходит. Сигнал U по-прежнему равен нулю, а движение системы будет происходить только под действием начальных отклонений. Корни характеристического уравнения замкнутой системы (I) являются, как правило, комплексно-сопряженными. Если ввести в рассмотрение фазовую плоскость системы (х; х см. фиг. 2), то движению системы из начального состояния (точка Л) будет соответствовать спираль I, которая либо накручивается на начало координат (при ), либо раскручивается (при ). Такое движение будет происходить до момента to, когда x(to)-ог-л:(), т. е. когда изображающая точка попадает на прямую (см. фиг. 2). После этого движение системы будет проходить под действием постоянного зафиксированного сигнала U(x.-x(to)a-X) и начальных условий {x(to) Хо; x(to) - а-Хп}. В зависимости от коэффициента передачи а безынерционного блока 6 это движение может происходить по траекториям П, 1П, IV. Если коэффициент передачи а выбрать так, что фазовая траектория пройдет через точку О (кривая П1 на фиг. 2), то в момент попадания в начало координат ( ) произойдет запоминание нулевого рассогласования x(ti)-Q и, так как координата, ее скорость и управляющий сигнал U равны нулю, то система остановится точно в заданном состоянии. Если же произойдет новое произвольное отклонение (точка В на фиг. 2), то движение будет происходить до точки Во на прямой NOM, а далее произойдет движение из этой точки с координатами х Xi, х - - а -х, под действием сигнала по траектории оО, подобной траектории ЛоО, так как и координаты точки Во, и сигнал U отличаются от рассмотренного выше случая движения из точки Ло одинаковым масштабом. Таким образом, переходные процессы в рассматриваемой системе полностью затухают за конечное время без перерегулирования. Предмет изобретения Система автоматического регулирования, содержащая усилительно-преобразовательное устройство, соединенное с объектом, первый элемент сравнения, подключенный к выходу объекта, второй элемент сравнения, выход которого связан со входом усилительно-преобразовательного устройства, и запоминающий элемент, отличающаяся тем, что, с целью повышения качества переходного процесса в системе, она содержит два безынерционных блока, выходы которых подключены к двум входам второго элемента сравнения, и соединенные последовательно фильтр и нульорган, выход которого подключен к управляющему входу запоминающего элемента, связанного со входом первого безынерционного звена, причем выход первого элемента сравнения соединен со входами фильтра, запоминающего элемента и второго безынерционного звена.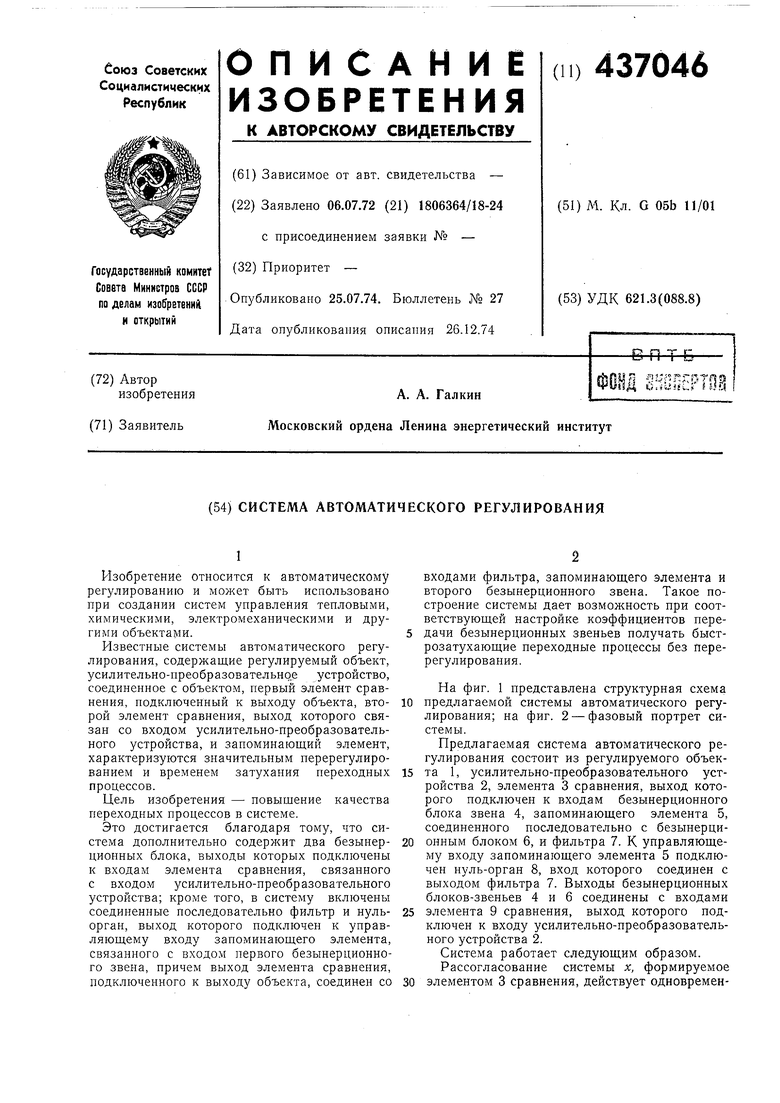
| название | год | авторы | номер документа |
|---|---|---|---|
| Корректирующее устройство | 1983 |
|
SU1145320A1 |
| КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 1972 |
|
SU435499A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1972 |
|
SU435500A1 |
| Способ формирования трехуровневого управляющего сигнала в релейных системах управления динамическим объектом и релейный регулятор для механизации этого способа | 1989 |
|
SU1777119A1 |
| Способ автоматического управления в системе с люфтом | 1975 |
|
SU728111A1 |
| Следящая система | 1979 |
|
SU840798A1 |
| Система последовательного финитного управления конечным состоянием линейных стационарных динамических объектов | 1987 |
|
SU1467534A1 |
| Самонастраивающаяся система управления барабанной мельницей | 1974 |
|
SU521012A1 |
| Автоматический регулятор резонанс-НОгО СОСТОяНия КОНТуРА НулЕВОйпОСлЕдОВАТЕльНОСТи СЕТи | 1979 |
|
SU813585A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2319026C1 |