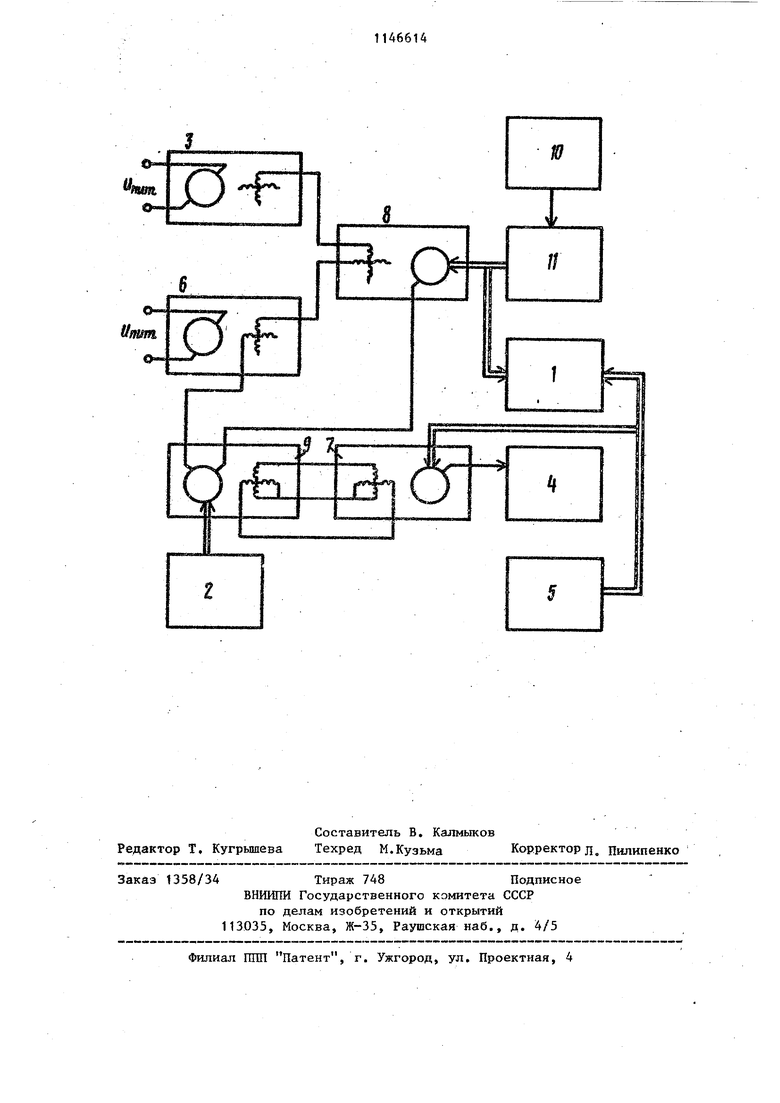
I , Изобретение относится к радиотехнике и может использоваться для управления лучом антенны радиолокационной станции (РЛС) при наведении его на цель по углу местао Известно устройство управления лучом РЛС, содержащее гировертикаль решающий трансформатор, ротор которого связан с осью азимута, датчик угла места, yci-шитель и двигательD Однако данное устройство имеет низкую точноть з равления лучом, Наиболее, близким техническим решением к предлагаемому является уст ройство управления положением антен ны для подвижного объекта, содержащее антенну, привод антенны по азимуту, привод антенны,по углу места, задатчик азимута, задатчик угла мес а, датчик продольного угла наклона объекта, выполненный в виде первого синусно-косинусного трансформатора (СКТ)5 датчик поперечного угла наклона объекта, выполненный в виде второго СКТ, приемник,.выполненный в виде третьего СКТ, четвертый СКТ. пятый |СКТ и усилитель, причем выход задатчика азимута соединен с входом привода антенны по азииуту, выходной вал которого соединен с валом управления антенны по азимуту п с валом ротора четвертого СКТ, синусная и косинусная обмот ки лстатора которого соединены с синусными обмотками соответственно второго и первого СКТ, выходной вал задатчика угла места соединен с валом ротора пятого СКТ, синусная и косинусная обмотки статора которого соединены с синусной и косинусной обмотками статора третьего СКТ, обмотка ротора которого соединена через усилитель с входом привода ан тенны по углу места, а выходной вал привода антенны По углу места соеди ней с валом управления антенны по углу места и с валом ротора третьего СКТ 2. Известное устройство также имеет недостаточную точность при наведеНИИ луча по углу места. Цель изобретения -повьшение точности управления антенной по углу места при продольных и поперечных наклонах объекта. . Цель достигается тем, что в устройстве управления положением антенны для подвижного объекта, содер ждщем антенну, привод антенны по азимуту, привод антенны по углу места, задатчик азимута, задатчик угла леста, датчик продольного угла на слона объекта, выполненный в виде первого синусно-косинусного трансформатора (СКТ)f датчик поперечного угла наклона объекта, выполг енный в виде второго СКТ, приемник, выполненный в виде третьего СКТ, четвертый СКТ, пятый СКТ и усилитель, причем выход задатчика азимута соединен с входом привода антенны по азимуту,- выходной вал которого соединен .с валом управления антенны по азимуту и с валом ротора четвертого СКТ, синусная и косинусная обмотки статора которого соединены с синусными обмотками соответственно второго и первого СКТ, вьгходной вал задатчика угла места соединен с валом ротора пятого СКТ, синусная и косинусная обмотки статора которого соединены с синусной и косинусной обмотками статора третьего СКТ, обмотка , ротора которого соединена через уси-литель с входом привода антенны по углу места, а выходной вал привода антенны по углу места соединен с валом управления антенны по углу места н с валом ротора третьего СКТ, косинусная обмотка статора второго СКТ соединена с синусной обмоткой ротора пятого СКТ, а синусная обмотка ротора четвертого СКТ соединена с . косинусной обмоткой ротора пятого СКТ. На чертеже представлена структурная электрическая схема предложенного устройства. Устройство содержит антенну 1, задатчик 2 угла места, датчик 3 про-, дольного угла наклона объекта, выполненный в виде первого СКТ, усилитель 4, привод 5 антенны по углу места, датчик 6 поперечного угла наклона объекта, выполненный в виде второго-СКТ, приемник 7, выполненный в виде третьего СКТ, четвертый СКТ 8, пятый СКТ 9, задатчик 10 азимута, привод -1 1 антенны по азимуту. Устройство работает следующим об- разомо В процессе эволюции носителя, на котором установлена антенна 1, возникающие при этом продольные и поперечные отклонения от установившегося состояния меняют положение луча
3
антенны в пространстве, уводя его от цели. Для возвращения луча в прежнее положение в устройстве управления формируется сигнал, пропорциональный продольному и поперечному отклонениям носителя, развороту антенны по азимуту и значениям заданного угла места луча антенны.С этой целью сигналы с синусных обмоток СКТдатчиков поперечного 6 и продольного 3 углов наклона объекта подают соответственно на синусную и косинус-.ную обмотки СКТ 8. При повороте ротора СКТ 8 на угол азимута, определяемый условиями сканирования антенны РЛС, с его синусной обмотки снимается сигнал, вьфажаемый уравнением
(
sinOcea oi.-9tti у cos оС
где- у - угол поперечного отклонения;
- - угол продольного отклонения;
oL - угол азимута.
Сигнал, пропорциональный , поступает на косинусную обмотку ротора пятого СКТ 9, на синусную обмотку которого подается сигнал с кйсинусной обмотки СКТ-датчика 6, пропорциональный косинусу поперечного от клонения (tee у), при этом вал ротора СКТ 9 разворачиваетря в соответствии с заданным углом места. Таким образом, на выходе СКТ 9 происходит суюетровани всех указанных выше
146614л.
сигналов, а на выходе СКТ-приемника 7 формируется сигнал
Ч,.СОб Г5« а«л«„
(sin ceJeC-Sin у
s,)sinV,
Sin /,c,AOlн Усиленный сигнал, равнь sinf , поступает на обмотку управления привода 5, который, вращаясь под действием приходящего сигнала, разворачивает ротор СКТ-приемника 7 на угол, при котором сигнал на входе усилителя 4 равен нулю. При этом выходная ось устройства, а вместе с ней и антенна РЛС поворачиваются на угол, определяемый уравнением
« о1гС51пПв1п ео5 oC-Sfhy .
S S«A«H г Таким образом, при сохраненш всех положительных свойств известного устройства, в предлагаемом уст ройстве повьниается точность отработки входного воздействия при зволюциях носителя, на котором расположена управляемая антенна РЛС. Так, при поперечных отклонениях до 30 и продольных до 10 методическая ошибка устройства не превышает 50, что почти в 2 раза меньше известного результата (1,5°). В таком же соотношении повмпается и точность наведения луча по углу места.
т
г
б
Ufom С}
.
о
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МОБИЛЬНОЙ РЛС ОБНАРУЖЕНИЯ | 1995 |
|
RU2115947C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МОБИЛЬНОЙ РЛС ОБНАРУЖЕНИЯ | 2001 |
|
RU2231820C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МОБИЛЬНОЙ РЛС ОБНАРУЖЕНИЯ | 2001 |
|
RU2220436C2 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Устройство управления положением диаграммы направленности антенны подвижного объекта | 1990 |
|
SU1805451A1 |
| НАКЛОННО-ПОВОРОТНЫЙ СТЕНД | 2004 |
|
RU2277697C1 |
| Трехосный гиростабилизатор киноаппарата | 1981 |
|
SU979855A1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕЛИ МОБИЛЬНОЙ РЛС | 2008 |
|
RU2410711C2 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ АНТЕННЫ ДЛЯ ПОДВИЖНОГО ОБЪЕКТА, содержащее антенну, привод антенны по азимуту, привод антенны по углу места, задатчик азимута, задатчик угла места, датчик продольного угла наклона объекта, вьтолненный в .виде первого синусно-косинусного трансформатора (СКТ), датчик поперечного угла наклона объекта, выполненный в виде второго СКТ, приемник,- выполненный в виде третьего СКТ, ,четвертый СКТ, пятый СКТ и усилитель, причем выход задатчика азимута соединен с входом привода антенны по азимуту, выходной вал которого соединен с валом управления антенны по азимуту и с валом ротора четвертого СКТ, синусная и косинусная обмотки статора которого соединены с синусными обмотками соответственно второго и первого СКТ, выходной вал задатчика угла места соединен с валом ротора пятого СКТ, синусная и косинусная обмотки статора которого соединены с синусной и косинусной обмотками статора третьего СКТ, обмотка ротора которого соединена через усилитель с входом привода антенны по углу места, а выходной вал привода антенны по углу места соединен с валом управления антенны по углу места и с валом ротора третьего СКТ, отличающе-еся тем, что, с целью повышения точности -управления антенной по углу места при продольных и поперечных наклонах объекта, косинусная обмотка статора второго 4: СКТ соединена с синусной обмоткой а ротора пятого СКТ, а синусная обмота ка ротора четвертого СКТ соединена с косинусной обмоткой ротора пятого СКТ.
J Z /
rri
„.
о
гп
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электрорадиоавтоматика.М., Госэнергоиздат, 1959, с | |||
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Обтекатели антенны | |||
| Перевод с английского.Под ред | |||
| А.И | |||
| Шпунтова | |||
| М., Советсткое радио, 1950, с.260 i( прототип). | |||
