2.Устройство по п. 1, отличающееся тем, что гибкий элемент выполнен из отдельных участков переменной толщины.
3.Устройство по п. 1, отличающееся тем, что гибкий элемент выполнен замкнутым и запасован на направляющих роликах, установленных на раме по контуру многоугольника, периметр которого пропорционален общей длине гибкой, связи, причем величина большей вертикальной стороны многоугольника пропорциональна погрузочной зоне платформы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-опускное устройство | 1980 |
|
SU1044592A1 |
| Утсановка для окраски изделий | 1975 |
|
SU651854A1 |
| Устройство для загрузки транспортных средств | 1986 |
|
SU1386541A1 |
| Устройство опрокидывания контейнеров для разгрузки | 1987 |
|
SU1498679A1 |
| Транспортная тележка | 1980 |
|
SU882897A1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО | 2005 |
|
RU2302990C1 |
| Устройство для загрузки изделий в контейнеры с полками | 1985 |
|
SU1303497A1 |
| Устройство для изготовления пружин для односторонных грыжевых бандажей | 1975 |
|
SU535994A1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ИНДИВИДУАЛЬНОГО СТРОИТЕЛЬСТВА | 1996 |
|
RU2092430C1 |
| ПУСКОВОЕ УСТРОЙСТВО ДЛЯ РАЗМИНИРОВАНИЯ, ПРИЦЕП ДЛЯ ЕГО РАЗМЕЩЕНИЯ И СЦЕПНОЕ УСТРОЙСТВО ДЛЯ ИХ БУКСИРОВКИ | 2003 |
|
RU2241197C1 |
1. ПОДЪЕМНО-ОПУСКНОЕ УСТРОЙСТВО, содержащее раму с направляющими, в которых смонтирована каретка, вильчатую платформу, соединенную посредством 22 232 Щ i «V,. АЗХ ШЗТЩ-.Т f 1& барабана и гибкого элемента с противовесом, ограничитель скорости и тормоз, отличающееся тем, что, с целью расщирения технологических возможностей и повышения производительности путем обеспечения двухкоординатной траектории передвижения платформы, барабан снабжен механизмом реверсирования, содержащим зубчатые пары с различным передаточным отношением для обеспечения требуемой величины -ходов прямого и холостого перемещения платформы и установленным с возможностью взаимодействия с бесконечной гибкой связью, которой снабжена вильчатая платформа, при этом последняя выполнена с шарнирно-параллелограммным механизмом для ее связи с кареткой. (Л О5 СХ) Ю Фнг.1
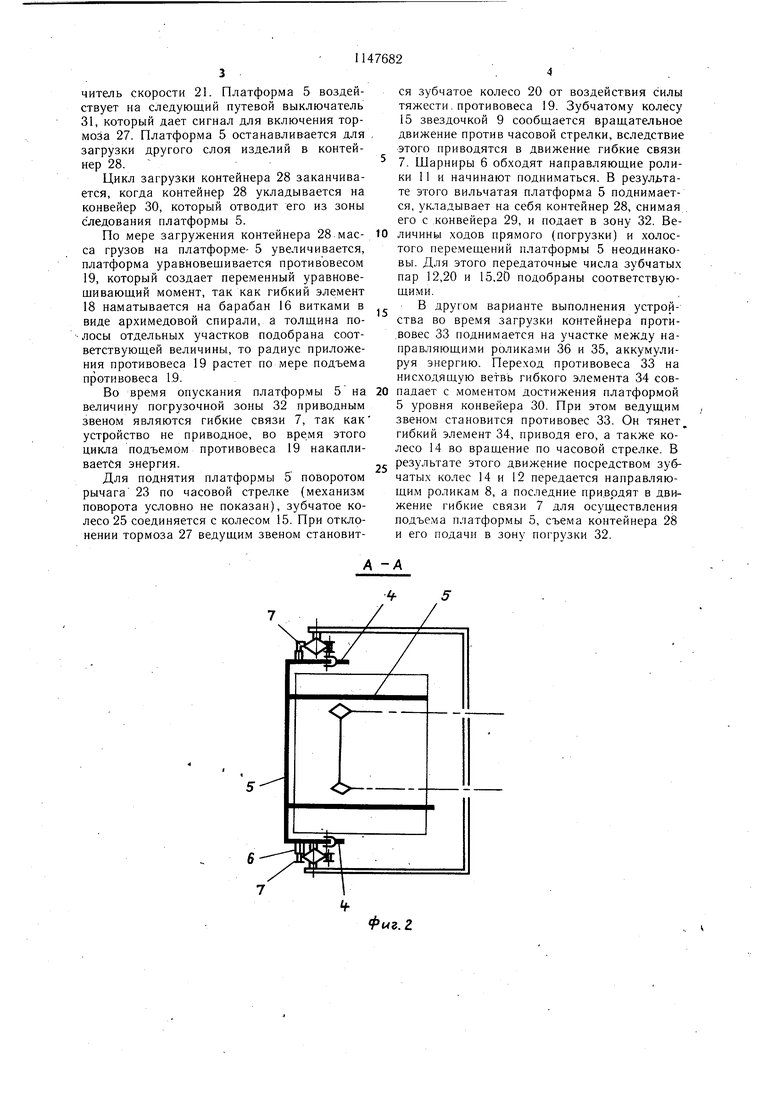
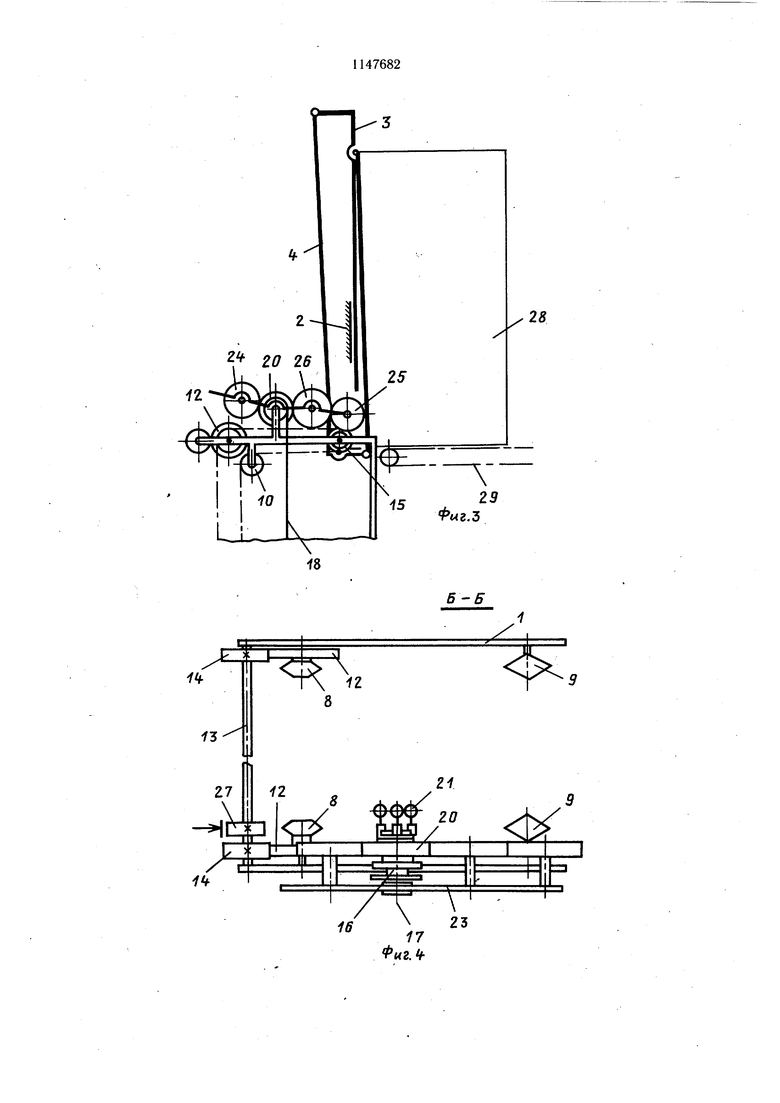
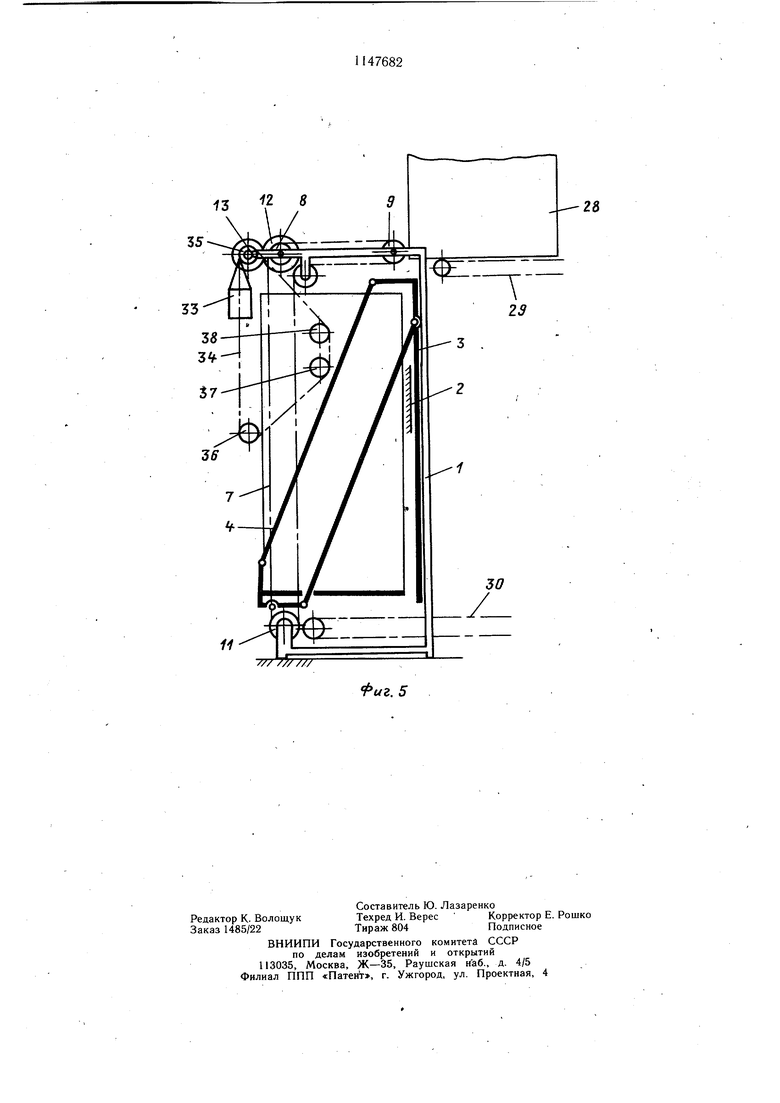
- Изобретение относится к погрузочно-разгрузочной технике, в частности к устройствам, предназначенным для вертикального транспортирования штучных грузов, преимущественно контейнеров, с передачей их с одного транспортирующего органа на другой, во время которой осуществляется комплектование штучными грузами. Цель изобретения - расширение технологических возможностей и повышение производительности путем обеспечения двухкоординатной траектории передвижения платформы. На фиг. 1 изображено подъемно-опускное устройство во время прямого хода платформы; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - устройство во время холостого хода платформы; на фиг. 4 - разрез на фиг. 1; на фиг. 5 - вариант выполнения подъемно-опускного устройства. Устройство Содержит раму 1, в направляющих 2 которой смонтирована каретка 3 с возможностью совершения плоскопараллельного возвратно-поступательного движения, посредством двух шарнирно-параллелограмных механизмов 4 соединенная с вильчатой платформой 5. Последняя при помощи шарниров б также соединена с двумя гибкими связями 7. Гибкие связи 7 огибают соответственно направляющие ролики 8-11, прикрепленные к раме 1. Направляющие ролики 8 смонтированы соответственно заодно с зубчатыми колесами 12, а последние кинематически соединены посредством вала 13 с зубчатыми колесами 14 между собой. Направляющий ролик 9 также сблокирован с зубчатым колесом 15. Устройство также содержит барабан 16, смонтированный на оси 17, прикрепленной к раме 1, гибкий элемент 18 с противовесом 19. Барабан 16 жестко соединен с зубчатым .колесом 20 и ограничителем скорости 21 и снабжен механизмом реверсирования 22, состоящим из двухплечевого рычага 23, не сущих зубчатых колес 24-26. Зубчатые колеса 24 и 25 смонтированы с возможностью зацепления соответственно с колесами 12 и 15, а колесо 26 является паразитным. Устройство также содержит тормоз 27, например, электромеханический, а в пунктах загрузки и разгрузки контейнеров 28 смонтированы конвейеры 29 и 30 для подачи и отвода пустых и укомплектованных контейнеров 28. Вильчатая платформа 5 выполнена с возможностью охватывания этих конвейеров, которые смонтированы в разных уровнях, в соответствии с высотой загружаемого контейнера 28. Гибкий элемент 18 противовеса 19 составлен из отдельных участков полосы переменной толщины, наматывающихся на барабан 16 нитками в виде архимедовой спирали. Устройство также имеет путевые выключатели 31. Погрузочная зона 32 предназначена для комплектования контейнеров 28. В Другом варианте выполнения устройство для уравновещивания перемещения платформы содержит противовес 33, прикрепленный к бесконечному гибкому элементу 34, установленному по контуру многогранника и огибающему направляющие ролики 35-38. Направляющий ролик 35 .жестко установлен по валу 13, а другие прикреплены к раме 1. Периметр элемента 34 пропорционален длине гибкой связи 7, причем величина большей вертикальной грани, т. е. между направляющими роликами 35 и 36, пропорциональна погрузочной зоне 32 платформы 5. Устройство работает следующим образом. По мере загружения контейнера 28 изделиями платформа 5 ступенчато опускается. Шаг опускания определяется путевыми выключателями 31, подающими сигналы тормозу 27. Загрузка контейнера 28 начинается в исходном верхнем положении: платформа 5 находится на уровне верхнего путевого выключателя 31, противовес 19 опущен, а зубчатое колесо 24 соединено с колесом 12. При загрузке определенного количества изделий в контейнер 28 общая масса грузов на платформе 5 изменяется, и она готова опускаться и поднять противовес 19, т. е. аккумулировать энергию. Отключался тормоз 27, и платформа 5 начинает опускаться со скоростью, которую определяет ограничитель скорости 21. Платформа 5 воздействует на следующий путевой выключатель 31, который дает сигнал для включения тормоза 27. Платформа 5 останавливается для загрузки другого слоя изделий в контейнер 28. Цикл загрузки контейнера 28 заканчивается, когда контейнер 28 укладывается на конвейер 30, который отводит его из зоны следования платформы 5. По мере загружения контейнера 28.маеса грузов на платформе- 5 увеличивается, платформа уравновещивается противовесом 19, который создает переменный уравновещивающий момент, так как гибкий элемент 18 наматывается на барабан 16 витками в виде архимедовой спирали, а толщина полосы отдельных участков подобрана соответствующей величины, то радиус приложения противовеса 19 растет по мере подъема противовеса 19. Во время опускания платформы 5 на величину погрузочной зоны 32 приводным звеном являются гибкие связи 7, так как устройство не приводное, во время этого цикла подъемом противовеса 19 накапливается энергия. Для поднятия платформы 5 поворотом рычага 23 по часовой стрелке (механизм поворота условно не показан), зубчатое колесо 25 соединяется с колесом 15. При отклонении тормоза 27 ведущим звеном становится зубчатое колесо 20 от воздействия силы тяжести, противовеса 19. Зубчатому колесу 15 звездочкой 9 сообщается вращательное движение против часовой стрелки, вследствие этого приводятся в движение гибкие связи 7. Шарниры 6 обходят направляющие ролики 11 и начинают подниматься. В результате этого вильчатая платформа 5 поднимается, укладывает на себя контейнер 28, снимая . его с конвейера 29, и подает в зону 32, Величины ходов прямого (погрузки) и холостого перемещений платформы 5 неодинаковы. Для этого передаточные числа зубчатых пар 12,20 и 15,20 подобраны соответствующими. В другом варианте выполнения устройства во время загрузки контейнера проти.вовес 33 поднимается на участке между направляющими роликами 36 и 35, аккумулируя энергию. Переход противовеса 33 на нисходящую ветвь гибкого элемента 34 совпадает с моментом достижения платформой 5 уровня конвейера 30. При этом ведущим звеном становится противовес 33. Он тянет гибкий элемент 34, приводя его, а также колесо 14 во вращение по часовой стрелке. В результате этого движение посредством зубчатых колес 14 и 12 передается направляющи.м роликам 8, а последние приводят в движение гибкие связи 7 для осуществления подъема платформы 5, съема контейнера 28 и его подачи в зону погрузки 32.
1Z 2 8
11
//// ///
Фиг. 5
| Подъемно-опускное устройство | 1980 |
|
SU1044592A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
