77Г2 9 .
I 532
///// //
7 16 15 30 гд 2J 6 п J
СО 00 05 СЛ 4
ц:) и г. г
Изобретение относится к загрузочным устройствам и может быть использовано при загрузке крытых транспортных средств типа фургонов, вагонов и т.п. штучными грузами.
Цель изобретения - повышение надежности устройства.
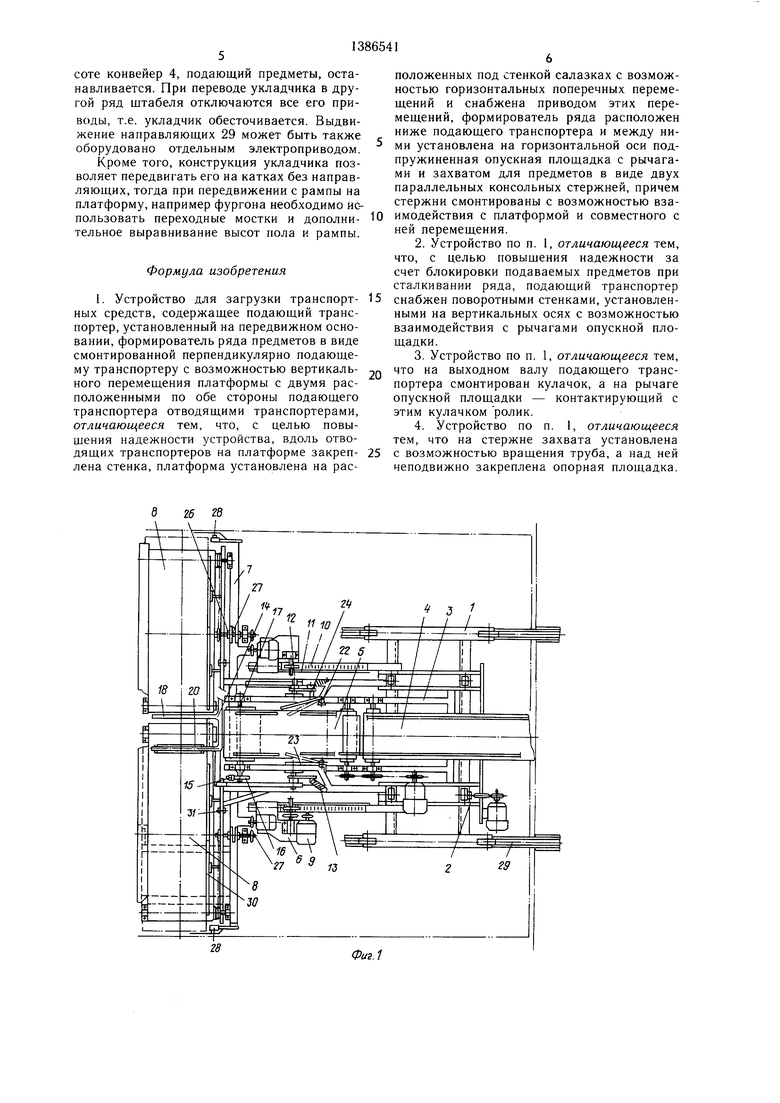
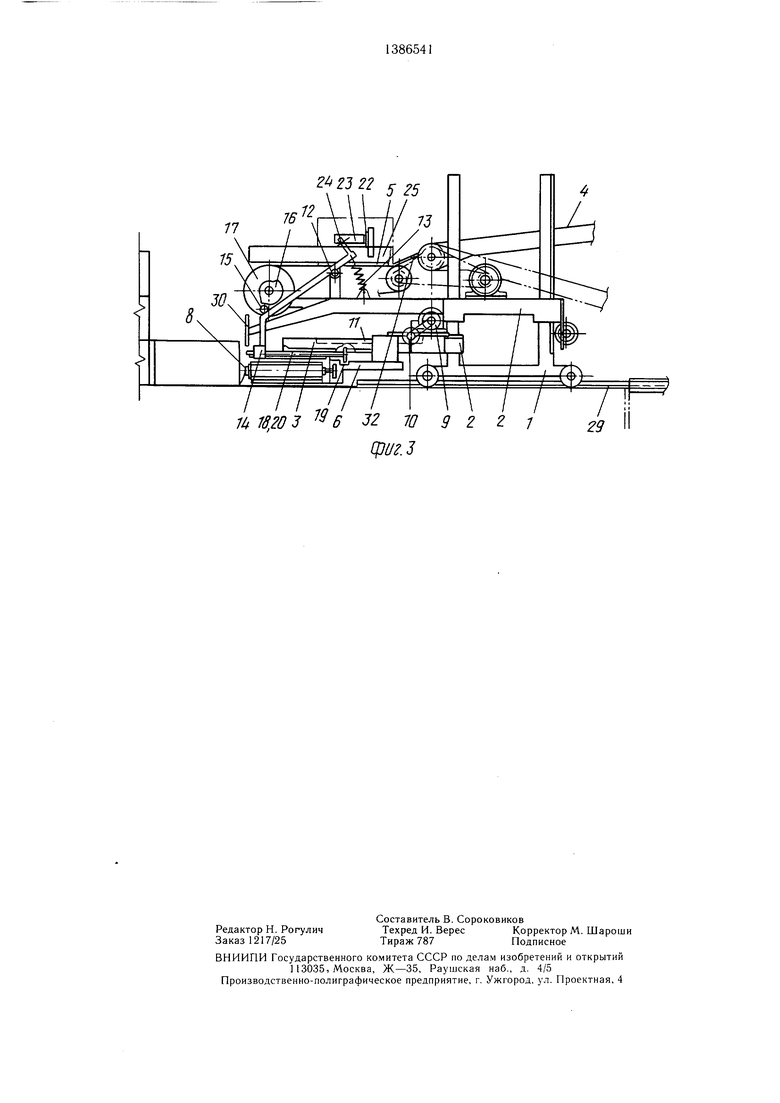
На фиг. 1 изображено устройство, рабочее положение; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, положение сталкивания сформированного ряда, вид сбоку.
Устройство состоит из передвижного основания 1, на котором на стойках в пазах закреплена подъемно-опускная каретка 2, вклю10
1, а следовательно, и все устройство передвигается на телескопических направляющих 29, концы которых при работе выходят за край погрузочной рамки склада и вдвигаются непосредственно на платформу находящихся под погрузкой транспортных средств. На платформе 7 вдоль отводящих транспортеров 8 закреплена стенка 30, предназначенная для сталкивания ряда предметов. Платформа 7 установлена на расположенных под стенкой 30 салазках 21. Стенка 30 имеет два разъема, снабженных горизонтальными осями 31 для складывания стенки. К боковинам 25 крепится переходная платформа 32, расположенная на
чающая опорную раму 3. На передвижном . - участке перехода с конвейера 4 на коносновании расположен подающий транспортер, состоящий, например, из двух ленточных конвейеров 4 и 5 с общим приводом, причем скорость конвейера 5 выще, чем конвейера 4. Устройство включает также формирователь ряда в виде смонтированной перпендикулярно подающему транспортеру с возможностью вертикального перемещения на раме 6 платформы 7 с двумя расположенными по обе стороны подающего транспортера отводящими транспортерами 8. Для перемещения рамы 6 служит привод 9 с шестерней 10 на горизонтальном валу, взаимодействующей с рейкой 11, жестко связанной с опорной рамой 3. Формирователь ряда расположен ниже подающего транспортера и между ними установлена на горизонтальной оси 12, подпружиненная пружиной 13, опускная площадка 14 с рычагами и захватом для предметов. На рычаге опускной площадки 14 установлен ролик 15, контактирующий с кулачком 16, смонтированным на выходном валу выходного барабана 17 подающего транспортера. Захват для предметов выполнен в виде двух параллельных консольных стержней 18 с выступами 19, которыми он имеет возможность взаимодействия с платформой 7 и совместного с ней перемещения. На одном из стержней 18 захвата установлена с возможностью вращения труба 20, а над ней неподвижно закреплена опорная площадка для предметов. Платформа 7 установлена на савейер 5.
Устройство работает следующим образом.
Используется укладчик, преимущественно, при загрузке транспортных средств штучными ящичными грузами с укладкой в 20 щтабель внутри фургона.
Автомобиль-фургон подается задним ходом вплотную к погрузочной рампе и телескопические направляющие рельсы свободными концами задвигаются вовнутрь через задние двери и устанавливаются на полу платформы фургона.
По направляющим рельсам на катках укладчик переходит на платформу транспортного средства, т.е., например фургона, передвигаясь вручную по направляющим 29, устанавливается в передней части кузова и на конвейер 4 поштучно с рампы подаются предметы, например ящичные штучные грузы.
Весь процесс механизированной загрузки состоит из установки укладчика в начальное положение и последующий перевод укладчика в другой по высоте ряд предметов. После заполнения нескольких рядов по высоте укладчик переводится в другой ряд штабеля, начиная порядную загрузку с нижнего ряда.
40 Укладка предметов рядами и перевод укладчика по высоте в следующую позицию производится в автоматическом режиме. Предметы поступают по конвейеру 4 и переходят по переходной платформе 32 на дви30
35
лазках 21 с возможностью горизонтальногожущийся с увеличенной скоростью кон
поперечного перемещения и снабжена приводом этих перемещений. Подающий транспортер снабжен установленными на вертикальных осях 22 поворотными стенками 23 с возможностью взаимодействия с рычагами 24 опускной площадки 14. Транспортер снабжен также боковинами 25.
Платформа 7 выполнена для удобства транспортировки складной, для чего она снабжена горизонтальной осью 26, расположенной соосно с приводной осью 27 каждого из отводящих транспортеров 8.
Контроль наличия предметов на отводящих транспортерах осуществляется с помощью концевых выключателей 28. Основание
50
55
вейер 5. Поток поступающих предметов растягивается и между соседними ящиками создается промежуток, необходимый для поштучного распределения предметов с последующей укладкой в ряд на отводящих транспортерах 8 поперечной платформы 7 вплотную предмет к предмету.
При сходе очередного предмета с барабана 17 распределительного конвейера 5 предмет попадает на опускную площадку 14, которая удерживается в верхнем положении пружиной 13 до момента воздействия кулачка 16 на ролик 15. Причем в свободном состоянии опускная площадка 14 под действием пружины 13 уходит в
1, а следовательно, и все устройство передвигается на телескопических направляющих 29, концы которых при работе выходят за край погрузочной рамки склада и вдвигаются непосредственно на платформу находящихся под погрузкой транспортных средств. На платформе 7 вдоль отводящих транспортеров 8 закреплена стенка 30, предназначенная для сталкивания ряда предметов. Платформа 7 установлена на расположенных под стенкой 30 салазках 21. Стенка 30 имеет два разъема, снабженных горизонтальными осями 31 для складывания стенки. К боковинам 25 крепится переходная платформа 32, расположенная на
- участке перехода с конвейера 4 на участке перехода с конвейера 4 на конвейер 5.
Устройство работает следующим образом.
Используется укладчик, преимущественно, при загрузке транспортных средств штучными ящичными грузами с укладкой в 0 щтабель внутри фургона.
Автомобиль-фургон подается задним ходом вплотную к погрузочной рампе и телескопические направляющие рельсы свободными концами задвигаются вовнутрь через задние двери и устанавливаются на полу платформы фургона.
По направляющим рельсам на катках укладчик переходит на платформу транспортного средства, т.е., например фургона, передвигаясь вручную по направляющим 29, устанавливается в передней части кузова и на конвейер 4 поштучно с рампы подаются предметы, например ящичные штучные грузы.
Весь процесс механизированной загрузки состоит из установки укладчика в начальное положение и последующий перевод укладчика в другой по высоте ряд предметов. После заполнения нескольких рядов по высоте укладчик переводится в другой ряд штабеля, начиная порядную загрузку с нижнего ряда.
0 Укладка предметов рядами и перевод укладчика по высоте в следующую позицию производится в автоматическом режиме. Предметы поступают по конвейеру 4 и переходят по переходной платформе 32 на дви0
5
жущийся с увеличенной скоростью кон
0
5
вейер 5. Поток поступающих предметов растягивается и между соседними ящиками создается промежуток, необходимый для поштучного распределения предметов с последующей укладкой в ряд на отводящих транспортерах 8 поперечной платформы 7 вплотную предмет к предмету.
При сходе очередного предмета с барабана 17 распределительного конвейера 5 предмет попадает на опускную площадку 14, которая удерживается в верхнем положении пружиной 13 до момента воздействия кулачка 16 на ролик 15. Причем в свободном состоянии опускная площадка 14 под действием пружины 13 уходит в
крайнее верхнее свое положение и при вращении барабана 17 ролик 15 выходит из зоны действия кулачка 16, чем достигается неподвижное положение опускной площадки 14 при включенном подающем и распредетера 8. Барабан последнего, расположенного по оси укладчика, способствует активной передаче предмета на короткий транспортер 8. Далее предмет перемещается по короткому транспортеру к его наружному балительном конвейерах 4 и 5, но при отсутст- 5 рабану и достигает упора, взаимодействую- вии предмета. Под действием веса пред- щего с концевым выключателем 28, и отклю- мета опускная площадка 14 частично растягивает пружину 13, но остается в поднятом положении, так как ролик 15 опирачает транспортер 8. Это произойдет, когда одна сторона составного транспортера 8 поперечной платформы 7 вся заполнится предется на плоскость профильного кулачка и юметами.
не позволяет опускаться площадке 14 вмес-В это время выключатель 28 остановит коте с предметом, обеспечивая фиксированноероткий транспортер 8 и переведет автома- положение предмета вначале опуска пло-тически на обратное включение длинный щадки 14.транспортер. Процесс заполнения предме- Предмет устанавливается на стержнях 18тами другой стороны поперечного трансзахвата опускной площадки 14 в положе- портера произойдет аналогичным образом НИИ, показанном на фиг. 2.и крайний в ряду предмет, воздействуя При непрерывно движущемся конвейерена выключатель 28, отключит транспортер 8. 5 при подходе выступа на профильномНа этом формирование одного ряда закан- кулачке 16 к ролику 15 площадка под дей-чивается, так как средний предмет, опус- ствием кулачка 16 плавно опускается, пово- 20тивщись на стержнях 18, остается здесь же, рачиваясь на горизонтальной оси 12, и при-и полученный сигнал от концевого выключа- жимается стержнями 18 к отводящему транспортеру 8, обеспечивая передачу предмета на поперечный отводящий транспортер 8 при утопленных стержнях 18.
Под действием движения ленты предмет 25„ атформы 7. Ряд предметов упрется в непод
перемещается от середины укладчика к его на-вижную относительно платформы 7 сталки- ружному краю.
теля этой стороны одновременно с отключением транспортера 8 включит привод 9 подвижной рамы 6. Последняя отодвинется назад вместе с транспортерами 8 поперечной
Стержень 18 прижимает ленту транспортера 8 сверху, взаимодействуя с движувающую стенку 30 и останется на месте, заняв места либо на полу платформы фургона, либо сверху ранее уже уложенного
щейся лентой трубой 20, прикрытой сверху р,да сформировав очередной ряд, как покасо стороны предмета опорной площадкой для установки предмета.
Предмет со стержней 18 переходит на ленту отводящего транспортера 8, а освобо- дивщиеся от предмета стержни 18 вместе
зано на фиг. 3 (укладка ряда на пол платформы).
При перемещении подвижной рамы 6 назад вместе со стержнями 18 за счет взас площадкой 14 после прекращения воздей- имодействия выступа 19 с подвижной ра- ствия кулачка 16 на ролик 15 под деист- „ой 6 стержни 18, двигаясь в пазах кор- вием пружины 13 возвращаются в верхнее „уса опускной площадки 14, удерживают свое положение для приема с распределитель- опускную площадку 14 в нижнем положе- ного конвейера 5 следующего предмета. „ри отведенной назад подвижной раме.
Во время нижнего положения опускной является необходимым условием для пе- площадки 14 распределительный конвейер 5 40 ревода опорной рамы 3 в другое по высоте автоматически перекрывается за счет удер- положение
живающих боковых стенок 23, взаимодей-Под действием привода подъемноствующих с рычагами 24, прижимающими опускной каретки 2 опорная рама 3 переходит их к середине конвейера 5, поворачивая на ц следующую позицию и после этого под- вертикальных осях 22.вижная рама 6 снова возвращается в перед- Расстояние между боковыми удерживаю- 45 положение за счет включения реверса щими стенками 23 становится меньще, чем
привода 9.
щирина предмета груза, и он останавливается на движущейся ленте.
После возврата опускной площадки 14 удерживающие поворотные стенки 23 освопривода 9.
Стержни 18 выходят из взаимодействия с салазками 2-1 и тем самым освобождают опускную площадку 14, которая
,sn возвращается в верхнее положение под деибождаютсяи раздвигаются пропуская оче- пружины 13. И цикл повторяется,
реднои предмет на сход с барабана 17 для,-, ,
подачи следующего предмета на опускную ° заполнения всех рядов щтабеля по
площадку - J .высоте укладчик передвигается по рельсам
Укладка предметов в ряд на состав- выдвинутые концы рельсовых наном поперечном конвейере, состоящим из. правляющих 29 укорачиваются из расчета
о -З vr T MnRWM /wnanLruu a ппа /finnii i nnn а игла
двух транспортеров 8, осуществляется по мере поступления предметов.
Вначале включают оба транспортера 8
установки укладч ика для формирования следующего ряда штабеля.
Во время сталкивания ряда предметов и при переводе настройки укладчика по выв сторону направления короткого транспортера 8. Барабан последнего, расположенного по оси укладчика, способствует активной передаче предмета на короткий транспортер 8. Далее предмет перемещается по короткому транспортеру к его наружному барабану и достигает упора, взаимодействую- щего с концевым выключателем 28, и отклю-
В это время выключатель 28 остановит короткий транспортер 8 и переведет автома- тически на обратное включение длинный транспортер. Процесс заполнения предме- тами другой стороны поперечного транспортера произойдет аналогичным образом и крайний в ряду предмет, воздействуя на выключатель 28, отключит транспортер 8. На этом формирование одного ряда закан- чивается, так как средний предмет, опус- тивщись на стержнях 18, остается здесь же, и полученный сигнал от концевого выключа-
„ атформы 7. Ряд предметов упрется в непод
теля этой стороны одновременно с отключением транспортера 8 включит привод 9 подвижной рамы 6. Последняя отодвинется назад вместе с транспортерами 8 поперечной
вижную относительно платформы 7 сталки-
вающую стенку 30 и останется на месте, заняв места либо на полу платформы фургона, либо сверху ранее уже уложенного
р,да сформировав очередной ряд, как пока р,да сформировав очередной ряд, как показано на фиг. 3 (укладка ряда на пол платформы).
опускной каретки 2 опорная рама 3 переходит ц следующую позицию и после этого под- вижная рама 6 снова возвращается в перед- положение за счет включения реверса
привода 9.
Стержни 18 выходят из взаимодействия с салазками 2-1 и тем самым освобождают опускную площадку 14, которая
правляющих 29 укорачиваются из расчета
vr T MnRWM /wnanLruu a ппа /finnii i nnn а игла
установки укладч ика для формирования следующего ряда штабеля.
Во время сталкивания ряда предметов и при переводе настройки укладчика по высоте конвейер 4, подающий предметы, останавливается. При переводе укладчика в другой ряд штабеля отключаются все его приводы, т.е. укладчик обесточивается. Выдвижение направляюш.их 29 может быть также с оборудовано отдельным электроприводом. Кроме того, конструкция укладчика позволяет передвигать его на катках без направляющих, тогда при передвижении с рампы на платформу, например фургона необходимо использовать нереходные мостки и дополнительное выравнивание высот пола и рампы.
Формула изобретения
положенных под стенкой салазках с возможностью горизонтальных поперечных перемещений и снабжена приводом этих перемещений, формирователь ряда расположен ниже подающего транспортера и между ними установлена на горизонтальной оси подпружиненная опускная площадка с рычагами и захватом для предметов в виде двух параллельных консольных стержней, причем стержни смонтированы с возможностью вза- 10 имодействия с платформой и совместного с ней перемещения.
2. Устройство по п. 1, отличающееся тем, что, с целью повышения надежности за счет блокировки подаваемых предметов при
сталкивании ряда, подающий транспортер 1. Устройство для загрузки транспорт-15 снабжен поворотными стенками, установленных средств, содержащее подающий транс-ными на вертикальных осях с возможностью портер, установленный на передвижном осно-взаимодействия с рычагами опускной пло- вании, формирователь ряда предметов в видещадки.
смонтированной перпендикулярно подающе-3. Устройство по п. 1, отличающееся тем,
му транспортеру с возможностью вертикаль- Q что на выходном валу подающего трансного перемещения платформы с двумя рас-портера смонтирован кулачок, а на рычаге
положенными по обе стороны подающегоопускной площадки - контактирующий с
транспортера отводящими транспортерами,этим кулачком ролик.
отличающееся тем, что, с целью повы-4. Устройство по п. 1, отличающееся
щения надежности устройства, вдоль отво-тем, что на стержне захвата установлена
дящих транспортеров на платформе закреп-25 с возможностью вращения труба, а над ней
лена стенка, платформа установлена на рас-неподвижно закреплена опорная площадка.
положенных под стенкой салазках с возможностью горизонтальных поперечных перемещений и снабжена приводом этих перемещений, формирователь ряда расположен ниже подающего транспортера и между ними установлена на горизонтальной оси подпружиненная опускная площадка с рычагами и захватом для предметов в виде двух параллельных консольных стержней, причем стержни смонтированы с возможностью вза- имодействия с платформой и совместного с ней перемещения.
2. Устройство по п. 1, отличающееся тем, что, с целью повышения надежности за счет блокировки подаваемых предметов при
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ПАКЕТИРОВАНИЯ ШТУЧНЫХ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО КИРПИЧЕЙ | 2006 |
|
RU2334670C2 |
| Устройство для укладки штучных предметов в тару | 1977 |
|
SU738948A1 |
| Устройство для пакетирования длинномерных изделий | 1975 |
|
SU611836A1 |
| Линия для подачи хлебобулочных изделий и их укладки на полки многоярусных контейнеров | 1989 |
|
SU1630746A1 |
| Пакеторазборное устройство | 1988 |
|
SU1684197A1 |
| Устройство для укладки в пакет поступающих по конвейеру штучных грузов | 1958 |
|
SU121072A1 |
| Автоматическая линия для разгрузки бетонных элементов на поддонах из сушильных вагонеток | 1982 |
|
SU1115906A1 |
| Стационарное или передвижное устройство для укладки штучных стандартных грузов в клетку | 1947 |
|
SU81618A1 |
| АВТОМАТИЧЕСКИЙ УКЛАДЧИК СТАЛЬНЫХ ХОЛОДНОГНУТЫХ ПРОФИЛЕЙ ТИПА П И С | 2024 |
|
RU2828529C1 |
| Пакетоформирующая машина | 1984 |
|
SU1168497A1 |
Изобретение относится к устройствам для загрузки штучных предметов в крытые транспортные средства. Цель изобретения - повышение надежности устройства. Предметы подаются по конвейеру 4 через платформу 32 на конвейер 5, попадают на стержни 18 опускной плош,адки 14. При взаимодействии ролика 15 с кулачком 16 плош,адка 14 опускает предметы на отводяш,ие транспортеры 8, на которых формируется ряд предметов. После формирования ряда приводом 9 рама 6 с платформой 7 и транспортерами 8 втягивается под раму 3, и ряд предметов стенкой 30 сталкивается на пол транспортного средства или на предыдуш,ий ряд, при этом подаваемые предметы на конвейере 5 блокируются поворотными стенками 23. После возвращения пружиной 13 опускной площадки 14 в исходное положение рама 6 поднимается на высоту ряда и цикл повторяется. Основание 1 перемещается вдоль загружаемого транспортного средства на направляющих 29. 3 з.п. ф-лы, 3 ил. (Л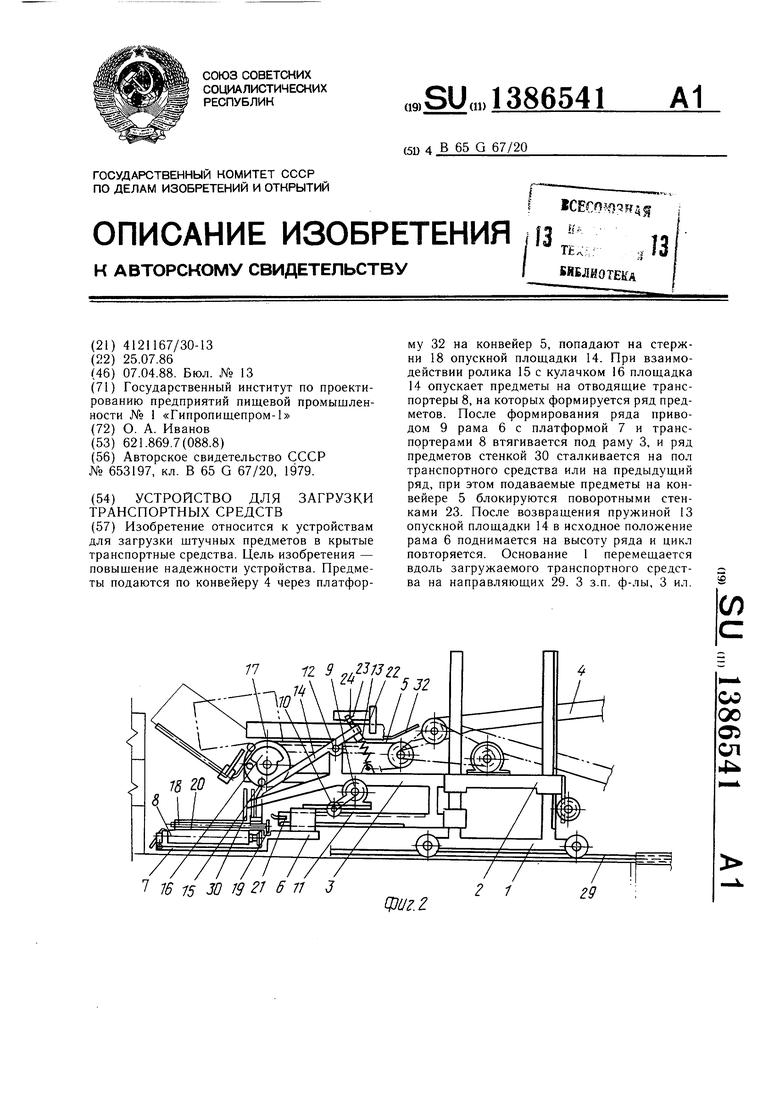
а 26 28
Фиг.1
f
/4 18,20 J 6 32 70 92 2 7
сриг.з
29
| Устройство для загрузки транспортных средств | 1977 |
|
SU653197A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
