Автоматика нажимных устройств прокатных станов должна приводить нажимное устройство стана перед каждым пропуском металла в положение, задаваемое специальным программным устройством. При выполнении этого задания нужно сочетать высокую точность с большой скоростью отработки при всем разнообразии уставок программы в весьма большом относительном диапазоне.
Эта задача решается чаш,е В ,сего с помош,ью потенциометрической следящ,ей системы и реже сельсинной. В обоих способах применяется, как правило, двойное грубо-тонкое регулирование. Останов в требуемой точке осушествляется разными способами, в которых часто основную роль играет электромеханический тормоз.
Однако применение указанных выше средств в устройствах автоматического управления приводит к сложным схемным решениям и достигается громоздкими средствами.
Применение грубо-тонкого регулирования, помимо того, приводит к усложнению программных устройств, вьшолняюш1.ихся в виде швейцарского коммутатора, операции на котором требуют большого внимания и времени службы управления прокаткой. Поэтому в большинстве случаев, особенно там, где предусматривается частая смена программ, требуется дублирование или утроение программных устройств, чтобы не терять значите.льного времени на набор программы при переходе с одной на другую. Этим обусловливается чрезмерная громоздкость программных устройств.
Предлагаемое устройство для автоматического управления нажимными винтами прокатного стана, основанное на применении следуюш,ей системы, с логарифмическим или тангенциальным преобразованием пути или угла и электронным регулятором с тиратронной приставкой, в значительной мере лишено указанных недостатков.
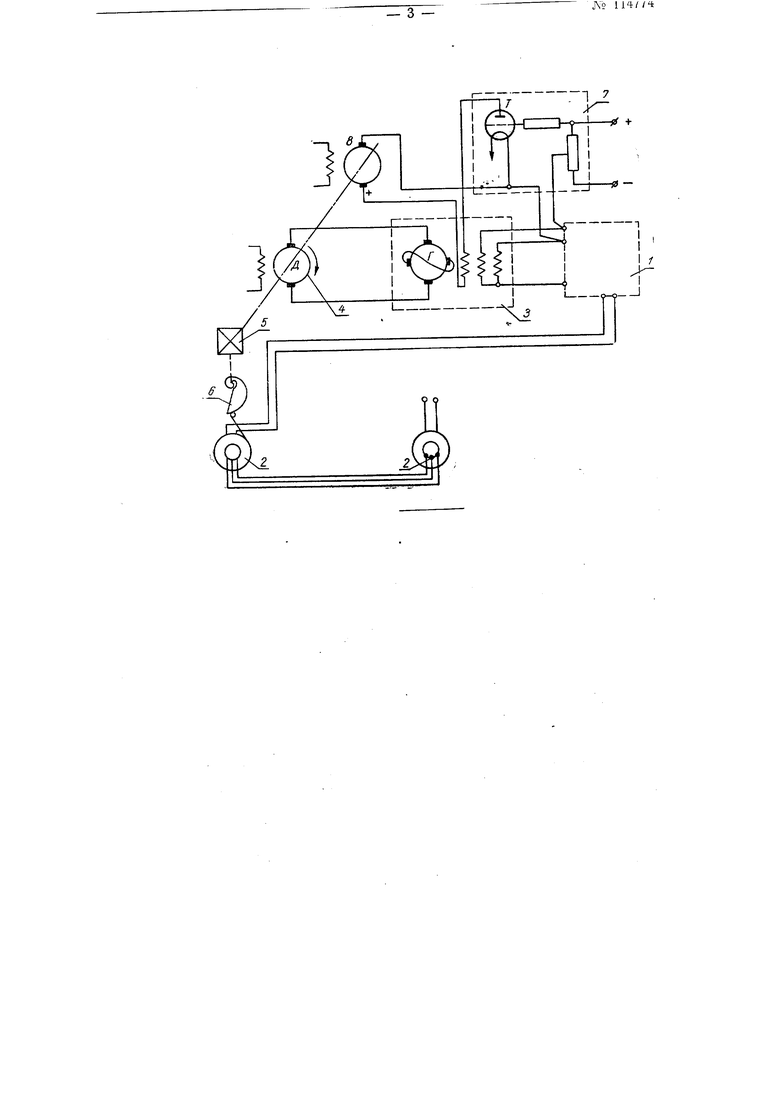
Устройство, приведенное на схеме, включает в себя фазоамплитудный электронный усилитель 1 задаюш,его и принимаюш,его сельсинов 2
« И4-//4-2 -
и амллитудина 3, включенного на шунтовой двигатель 4 постоянного тока. Сельсин-приёмник приводится в движение через редуктор 5 от указанного двигателя и помещается на устройстве 6 для логарифмического или тангенциального преобразования хода нажимных винтов. Сельсин-датчик приводится в движение через специальный редуктор, при помощи которого задается определенный угол рассогласования с сельсином-приемником, установленным на преобразовательном устройстве (логарифмическом или тангенциальном). Там же установлена шкала для отсчета величин раствора валков (в геометрических градусах для логарифмического преобразования в мм для тангенциального) и шкала поворота сельсина-приемника (ось сельсина), отградуированная в градусах (геометрических).
Схема включения сельсина-датчика и сельсина-приемника, установленного на механизме нажимного устройства, обеспечивает при рассогласовании последних как изменение фазы входного напряжения, так и изменение амплитуды.
Ввиду того, что в данной схеме автоматического регулирования электропривода со следящей системой требуется форсированная остановка механизма при значительном моменте инерции последнего, при-, менена особая схема включения тиратронной лампы блока-тиратрона 7 на выход электронного усилителя с получением зависимой релейной характеристики.
Анодная цепь тиратрона питается от напряжения тахогенератора 8, сидящего на валу двигателя нажимного устройства.
Устройство позволяет осуществить малогабаритный программный пульт в виде амперметра или кассы с непрерывными неравномерными щкалами, обеспечивающими постоянную малую относительную погрещность, что достигается применением логарифмического или тангенциального преобразования. Применение тиратронной приставки к электронному усилителю избавляет от необходимости введения в схему слежения более или менее сложных рещающих устройств, моделирующих общеизвестное условие точной остановки 0
Предмет изобретения
1.Устройство для автоматического управления нажимными винтами прокатного стана с применением следящей системы, содержащей датчик программы и датчик положения винтов, отличающееся тем, что, в целях обеспечения точности прокатки и упрощения схемы автоматического управления, в лривод датчика положения включен логарифмический или тангенциальный преобразователь пути или угла.
2.Устройство по п. 1, отличающееся тем, что, с целью обеспечения быстрого и точного останова, в следящей системе применен блок тиратрона, к входу которого подключен тахогенератор, сидящий на валу двигателя нажимного устройства.