9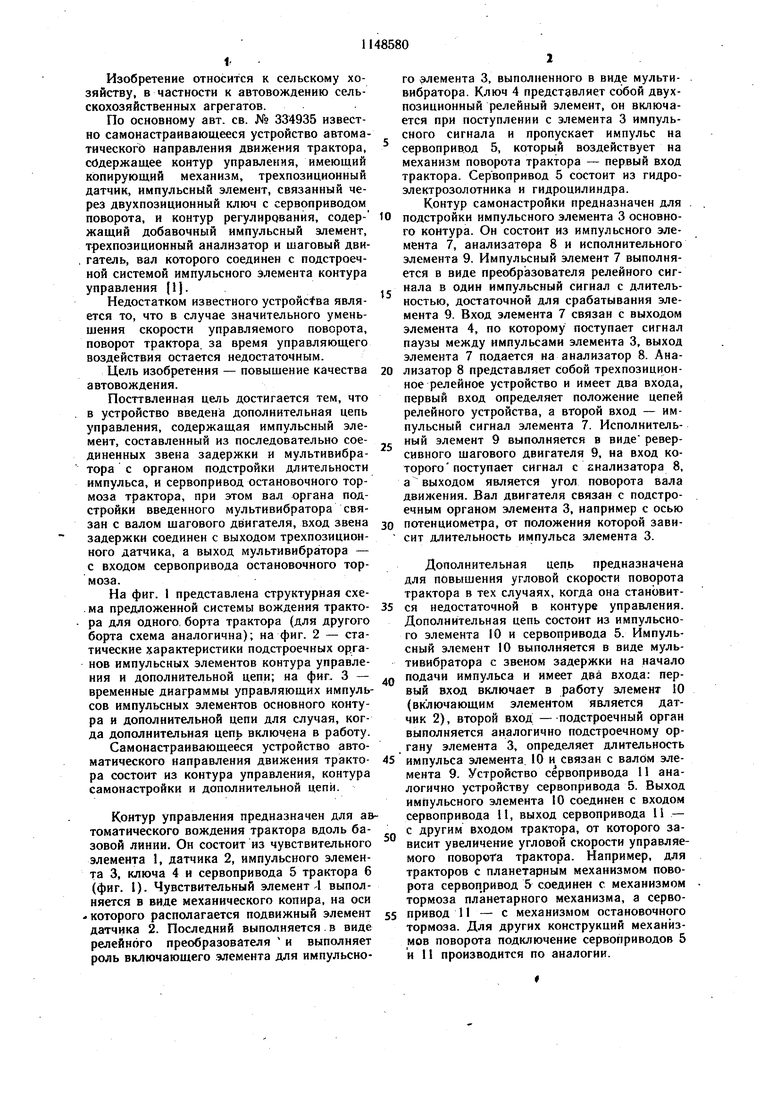
САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ ТРАКТОРА по авт. св. № 334935, отличающееся тем, что. с целью повышения качества автовождений, в него введена дополнительная цепь управления, содержащая импульсный элемент, состоящий из последовательно соединенных звена задержки и мультивибратора с органом подстройки длительности импульса, и сервопривод остановочного тормоза траКтюра, при этом вал органа подстройки введенного мультивибратора связан с валом шагового двигателя, вход звена задержки соединен с выходом трехпозиционного датчика, а выход мультивибратора - с входом сервопривода остановочного тормоза.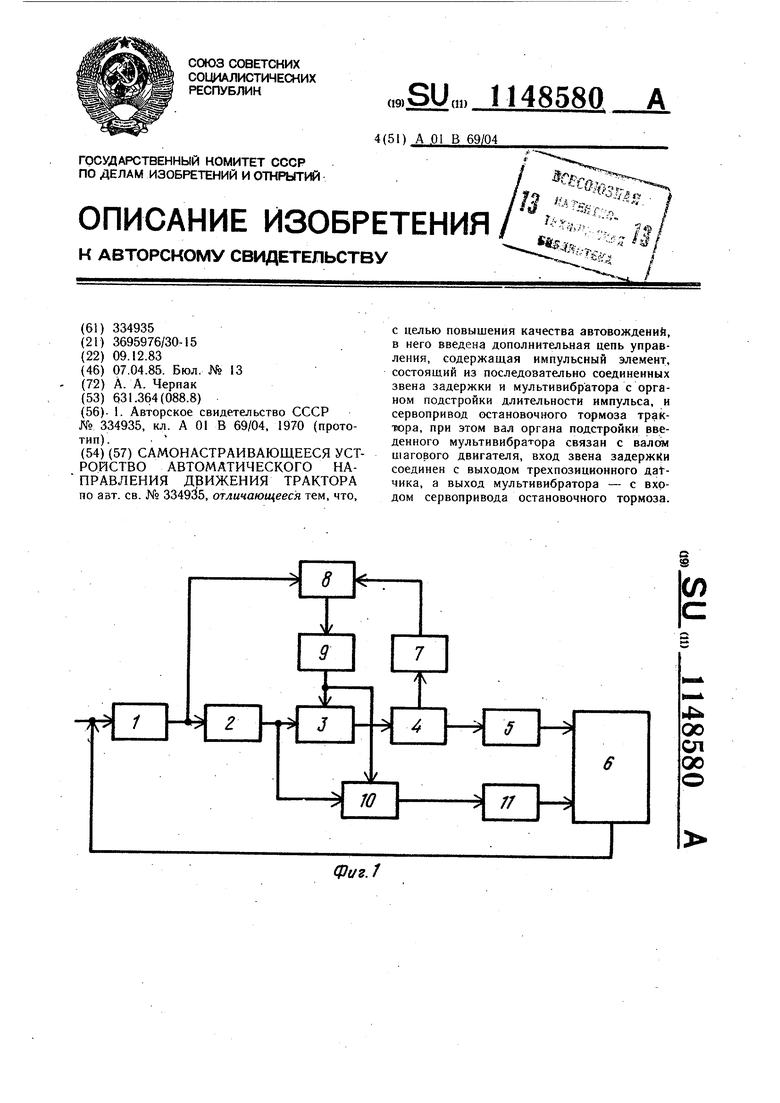
(puz.l
4 ОО СП
00 Изобретение относится к сельскому хозяйству, в частности к автовождению сельскохозяйственных агрегатов. По основному авт. св. № 334935 известно самонастраивающееся устройство автоматического направления движения трактора, содержащее контур управления, имеющий копирующий механизм, трехпозиционный датчик, импульсный элемент, связанный через двухпозиционный ключ с сервоприводом поворота, и контур регулирования, содержащий добавочный импульсный элемент, трехпозиционный анализатор и шаговый двигатель, вал которого соединен с подстроечной системой импульсного элемента контура управления (1). Недостатком известного ycтpoйcfвa является то, что в случае значительного уменьщения скорости управляемого поворота, поворот трактора за время управляющего воздействия остается недостаточным. Цель изобретения - повышение качества автовождения. Посттвленная цель достигается тем, что в устройство введена дополнительная цепь управления, содержащая импульсный элемент, составленный из последовательно соединенных звена задержки и мультивибратора с органом подстройки длительности импульса, и сервопривод остановочного тормоза трактора, при этом вал органа подстройки введенного мультивибратора связан с валом шагового двигателя, вход звена задержки соединен с выходом трехпозиционного датчика, а выход мультивибратора - с входом сервопривода остановочного тормоза. На фиг. 1 представлена структурная схе.ма предложенной системы вождения трактора для одного, борта трактора (для другого борта схема аналогична); на фиг. 2 - статические характеристики подстроечных органов импульсных элементов контура управления и дополнительной цепи; на фиг. 3 - временные диаграммы управляющих импульсов импульсных элементов основного контура и дополнительной цепи для случая, когда дополнительная цепь включена в работу. Самонастраивающееся устройство автоматического направления движения трактора состоит из контура управления, контура самонастройки и дополнительной цепи. Контур управления предназначен для ав томатического вождения трактора вдоль базовой линии. Он состоит из чувствительного элемента 1, датчика 2, импульсного элемента 3, ключа 4 и сервопривода 5 трактора 6 (фиг. 1). Чувствительный элемент 4 выполняется в виде механического копира, на оси . которого располагается подвижный элемент датчика 2. Последний выполняется. в виде релейного преобразователя и выполняет роль включающего .элемента для импульсного .элемента 3, выполненного в виде мультивибратора. Ключ 4 представляет собой двухпозиционный релейный элемент, он включается при поступлении с элемента 3 импульсного сигнала и пропускает импульс на сервопрнв.од 5, который воздействует на механизм поворота трактора - первый вход трактора. Сервопривод 5 состоит из гндроэлектрозолотника и гидроцилиндра. Контур самонастройки предназначен для подстройки импульсного элемента 3 основного контура. Он состоит из импульсного элемента 7, анализатора 8 и исполнительного элемента 9. Импульсный элемент 7 выполняется в виде преобразователя релейного сигнала в один импульсный сигнал с длительностью, достаточной для срабатывания элемента 9. Вход элемента 7 связан с выходом элемента 4, по которому поступает сигнал паузы между импульсами элемента 3, выход элемента 7 подается на анализатор 8. Анализатор 8 представляет собой трехпозиционное релейное устройство и имеет два входа, первый вход определяет положение цепей релейного устройства, а второй вход - импульсный сигнал элемента 7. Исполнительный элемент 9 выполняется в виде реверсивного шагового двигателя 9, на вход которого поступает сигнал с Еналнзатора 8, а выходом является угол поворота вала двилсения. Вал двигателя связан с подстроечным органом элемента 3, например с осью потенциометра, от положения которой зависит длительность импульса элемента 3. Дополнительная цепь предназначена для повышения угловой скорости поворота трактора в тех случаях, когда она становится недостаточной в контуре управления. Дополнительная цепь состоит из импульсного элемента 10 и сервопривода 5. Импульсный элемент 10 выполняется в виде мультивибратора с звеном задержки на начало подачи импульса и имеет два входа: первый вход включает в работу элемент 10 (включающим элементом является датчик 2), второй вход -подстроечный орган выполняется аналогично подстроечному органу элемента 3, определяет длительность импульса элемента. 10 и связан с валом элемента 9. Устройство сервопривода 1 аналогично устройству сервопривода 5. Выход импульсного элемента 10 соедннен с входом сервопривода 11, выход сервопривода П - с другим входом трактора, от которого зависит увеличение угловой скорости управляемого поворота трактора. Например, для тракторов с планетарным механизмом поворота сервоп ривод 5 соедннен с механизмом тормоза планетарного механизма, а сервопривод 11 - с механизмом остановочного тормоза. Для других конструкций механизмов поворота подключение сервоприводов 5 и 11 производится по аналогии.
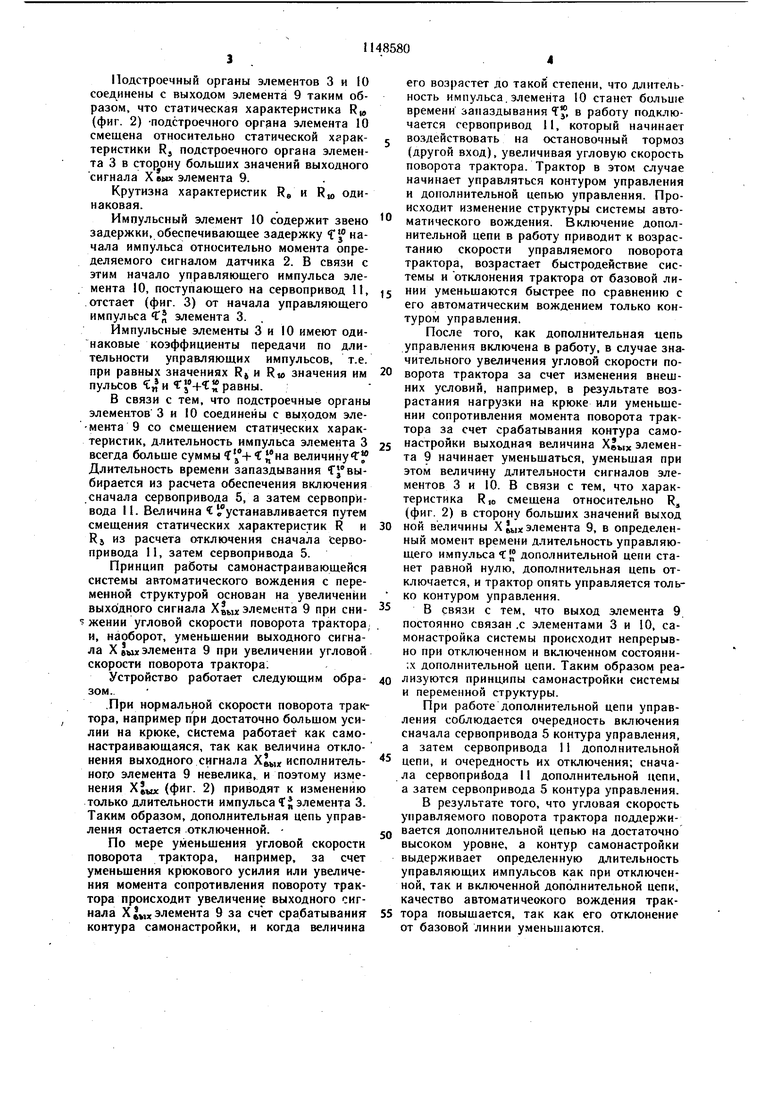
Подстроечный органы элементов 3 и 10 соединены с выходом элемента 9 таким образом, что статическая характеристика R,e (фиг. 2) -подстроечного органа элемента 10 смещена относительно статической характеристики RJ подстроечиого органа элемента 3 в сторону больших значений выходного сигнала Хвых элемента 9.
Крутизна характеристик Re и R одинаковая.
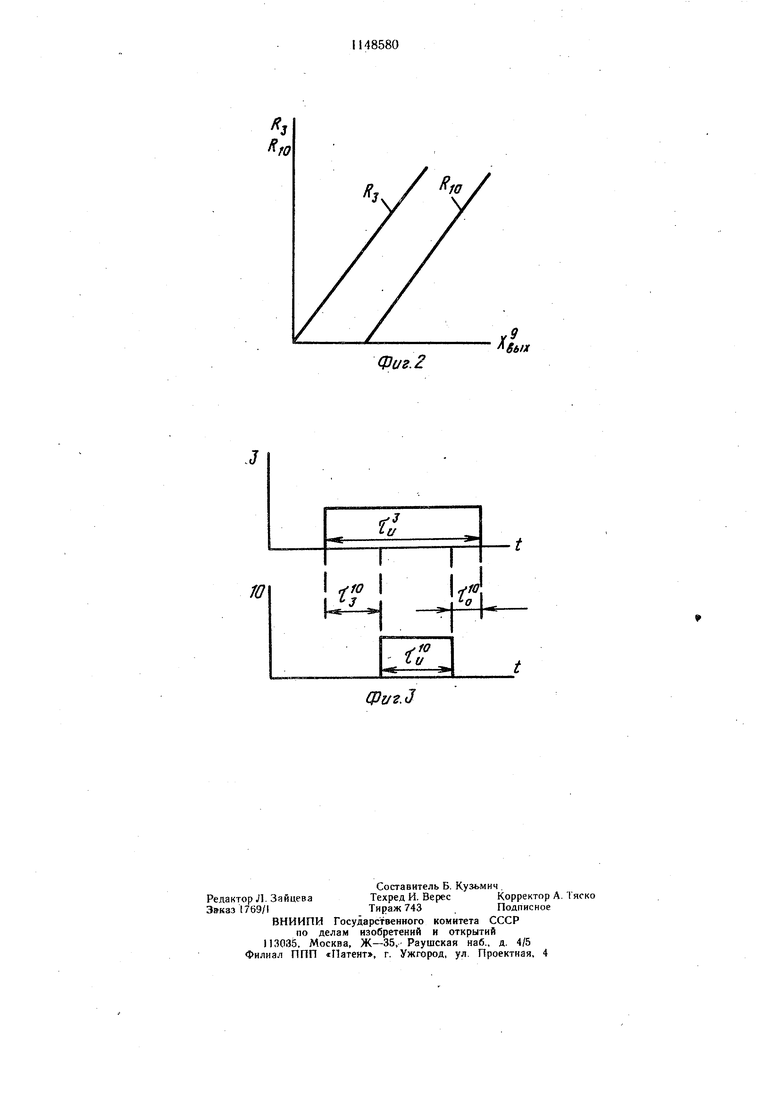
Импульсный элемент 10 содержит звено задержки, обеспечивающее задержку Tj начала импульса относительно момента определяемого сигналом датчика 2. В связи с этим начало управляющего импульса элемента 10, поступающего на сервопривод 11, отстает (фиг. 3) от начала управляющего импульса С элемента 3.
Импульсные элементы 3 и 10 имеют одинаковые коэффициенты передачи по длительности управляющих импульсов, т.е. при равных значениях R и Rw значения им пульсов CJ-t-tНравны.
В связи с тем, что подстроечные органы элемеятов 3 и 10 соединены с выходом элемента 9 со смещением статических характеристик, длительность импульса элемента 3 всегда больще суммы величину Tf Длительность времени запаздывания С выбирается из расчета обеспечения включения сначала сервопривода 5, а затем сервопривода П. Величина t „ устанавливается путем смещения статических характеристик R и RS из расчета отключения сначала сервопривода 11, затем сервопривода 5.
Принцип работы самонастраивающейся системы автоматического вождения с переменной структурой основан на увеличении выходного сигнала элемента 9 при снижении угловой скорости поворота трактора, и, наоборот, уменьщении выходного сигнала Х|ых элемента 9 при увеличении угловой скорости поворота трактора:
Устройство работает следующим образом..
.При нормальной скорости поворота трактора, например при достаточно больщом усилии на крюке, система работаеФ как самонастраивающаяся, так как величина отклонения выходного сигнала Хвых исполнительного элемента 9 невелика, и поэтому изменения XjvK (фиг. 2) приводят к изменению только длительности импульса Т элемента 3. Таким образом, дополнительная цепь управления остается отключенной. По мере уменьшения угловой скорости поворота трактора, например, за счет уменьшения крюкового усилия или увеличения момента сопротивления повороту трактора происходит увеличение выходного сигнала X In:, элемента 9 за счет срабатывание контура самонастройки, и когда величина
его возрастет до такой степени, что длительность импульса.элемента 10 станет больше времени запаздывания Т, в работу подключается сервопривод 11, который начинает
воздействовать на остановочный тормоз (другой вход), увеличивая угловую скорость поворота трактора. Трактор в этом случае начинает управляться контуром управления и дополнительной цепью управления. Происходит изменение структуры системы автоматического вождения. Включение дополнительной цепи в работу приводит к возрастанию скорости управляемого поворота трактора, возрастает быстродействие системы и отклонения трактора от базовой лиНИИ уменьшаются быстрее по сравнению с его автоматическим вождением только контуром управления.
После того, как дополнительная иепь управления включена в работу, в случае значительного увеличения угловой скорости поворота трактора за счет изменения внешних условий, например, в результате возрастания нагрузки на крюке или уменьшении сопротивления момента поворота трактора за счет срабатывания контура самонастройки выходная величина Х|ых элемента 9 начинает уменьшаться, уменьшая при этом величину длительности сигналов элементов 3 и 10. В связи с тем, что характеристика R,o смещена относительно R,, (фиг. 2) в сторону больших значений выход
ной величины X Jy элемента 9, в определенный момент времени длительность управляющего импульса дополнительной цепи станет равной нулю, дополнительная цепь отключается, и трактор опять управляется только контуром управления.
В связи с тем, что выход элемента 9 постоянно связан .с элементами 3 и 10, самонастройка системы происходит непрерывно при отключенном и вк«тюченном состояни,х дополнительной цепи. Таким образом реализуются принципы самонастройки системы и переменной структуры.
При работе дополнительной цепи управления соблюдается очередность включения сначала сервопривода 5 контура управления, а затем сервопривода 11 дополнительной
цепи, и очередность их отключения; сначала сервопривода II дополнительной цепи, а затем сервопривода 5 контура управления. В результате того, что угловая скорость управляемого поворота трактора поддерживается дополнительной цепью на достаточно высоком уровне, а контур самонастройки выдерживает определенную длительность управляющих импульсов как при отключенной, так и включенной дополнительной цепи, качество автоматического вождения трактора повышается, так как его отклонение от базовой линии уменьшаются.
фи-г.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ ТРАКТОРА | 0 |
|
SU334935A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
