Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам автоматического вождении тракторов.
Цель изобретения - иовьинение качества автоматического вождения гусеничного трактора.
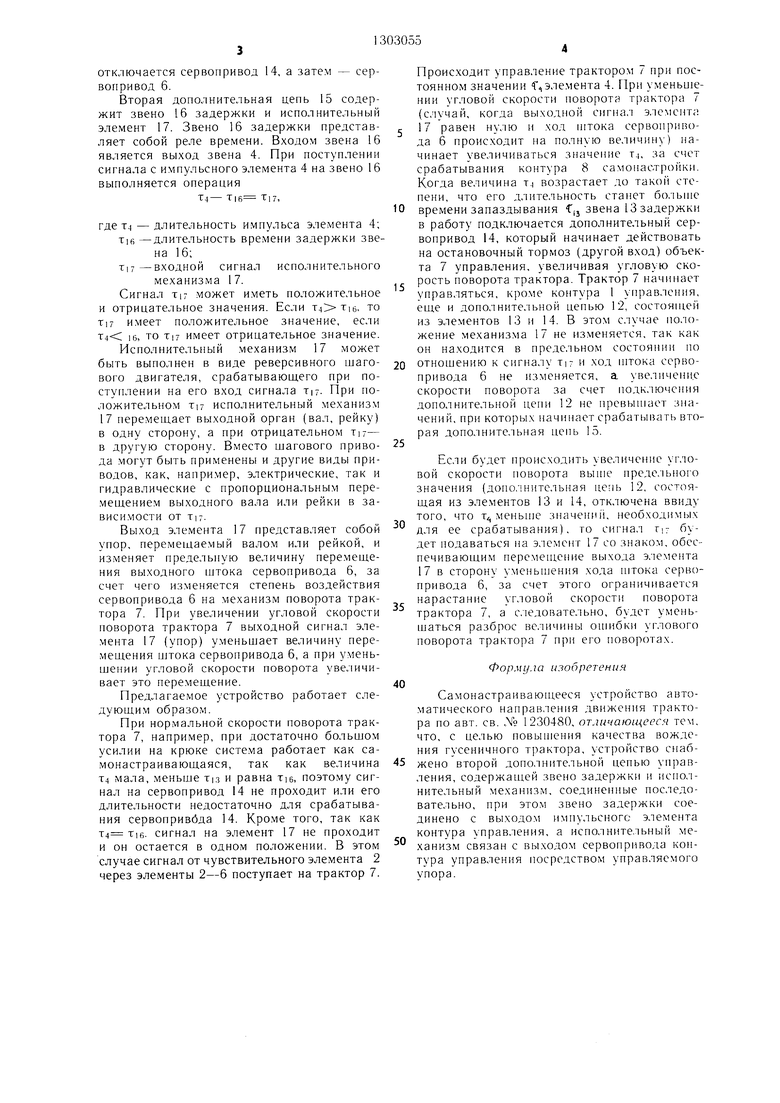
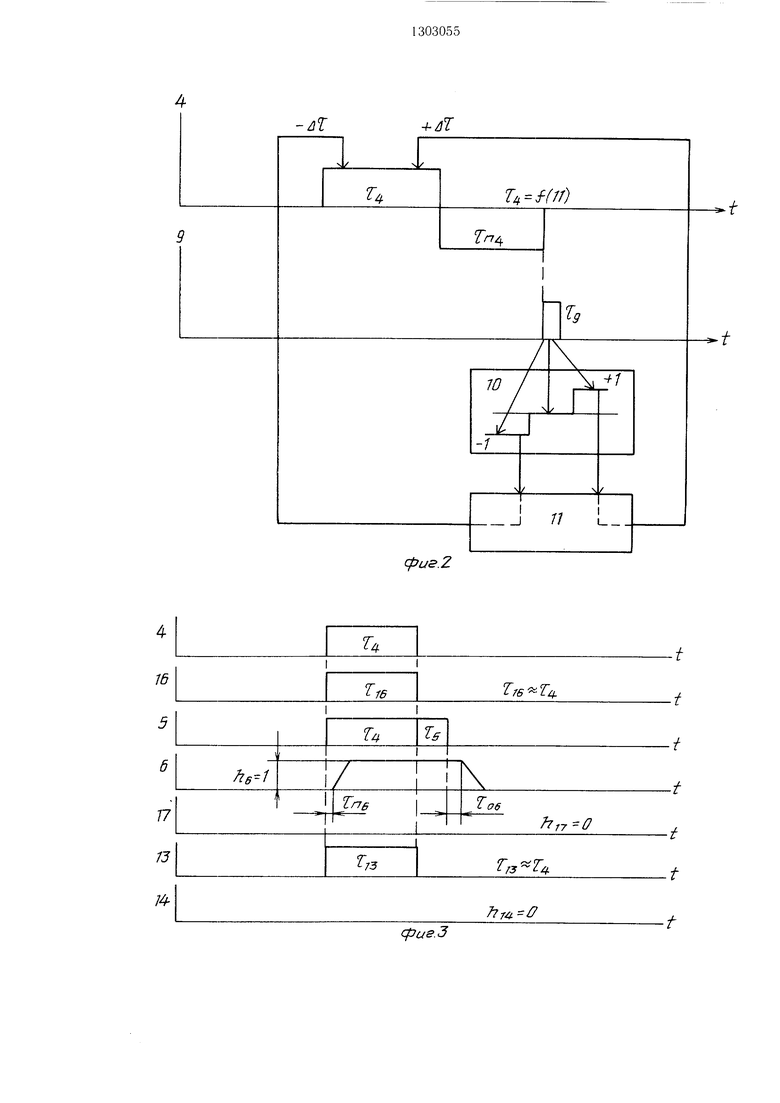
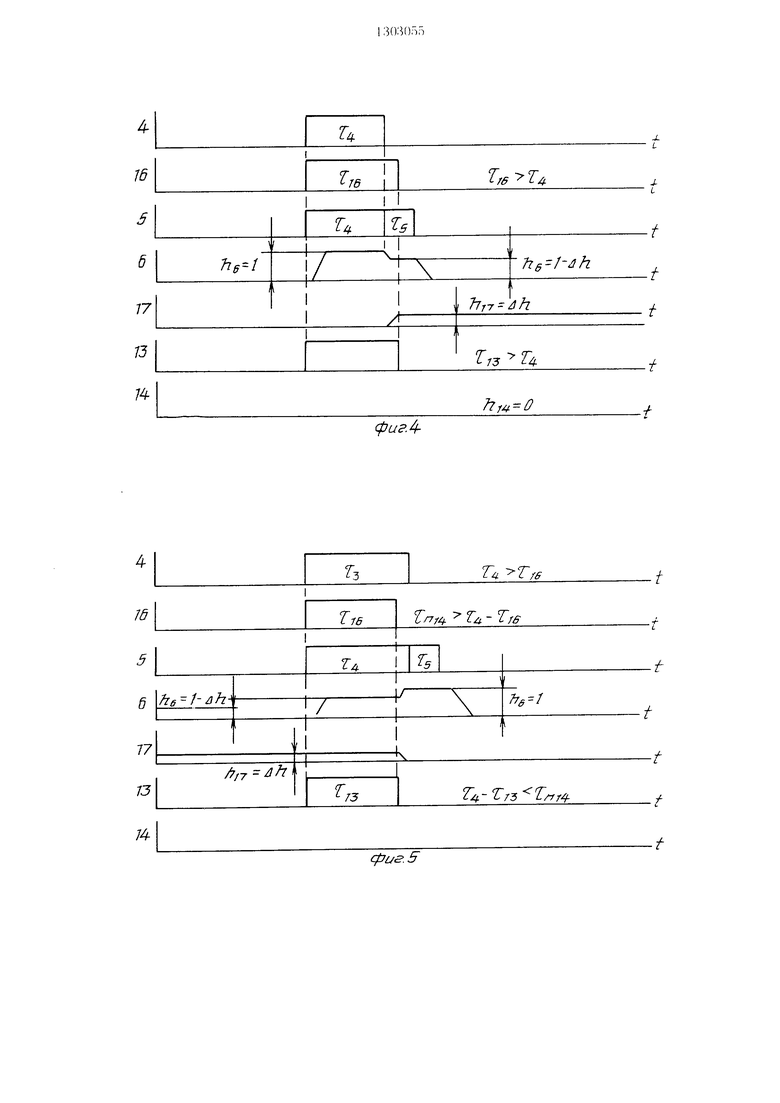
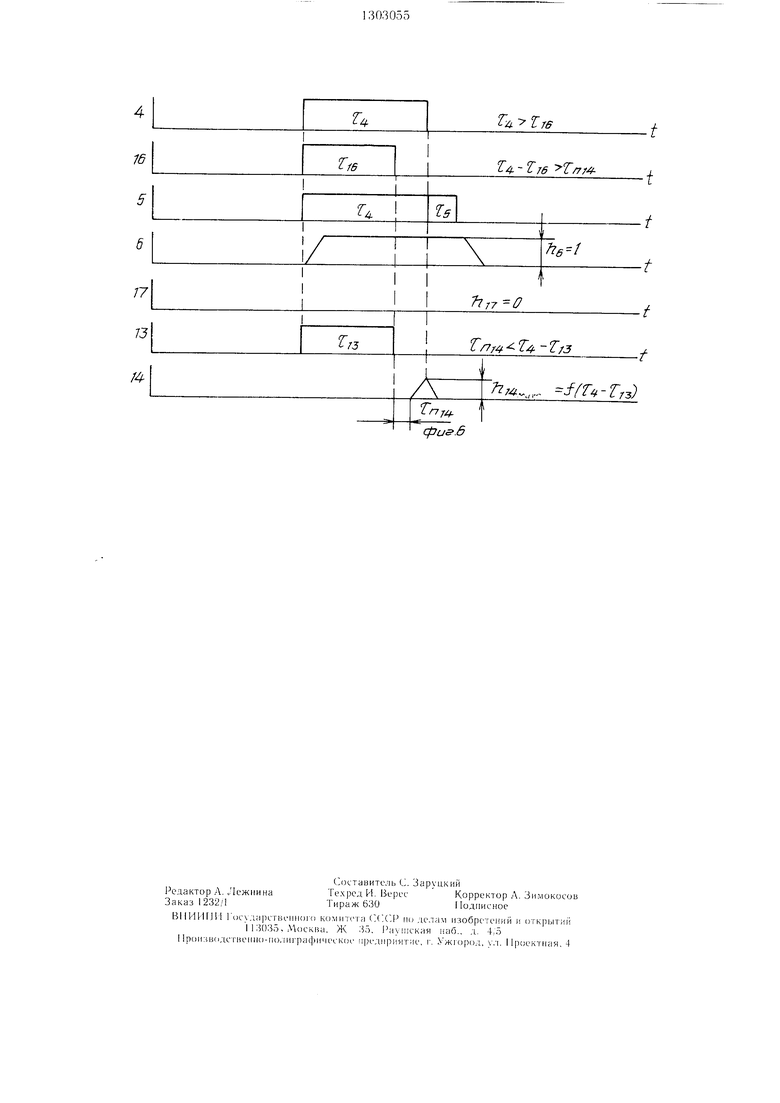
На фиг. 1 представлена структурная схема самонастраивающегося устройства; на фиг. 2 - временные диаграммы имнульсны.х элементов 4 и 9 и схема нрохождения сигнала но цепи: 4, 9, 10, 11, 4; на фиг. 3 - временная диаграмма работы э.чементов устройства при T.i« TIC,; на фиг. 4 - временная диаграмма работы элементов устройства при T.t Т|6 и т.1 Т1з; на фиг. 5 - временная диаграмма работы элементов устройства при т, и Tnv, т. -TIG; на фиг. 6 - временная диаграмма работы эле.ментов устройства ПрИТ4 Т|б и ТП|4 Т4Т|б.
На фиг. 2-6 обозначены; T.ie - прямое чистое запаздывание сервопривода 6; TOG - обратное чистое запаздывание сервопривода 6; Тим - прямое чистое запаздывание сервопривода 14; hf, - выходная координата сервопривода 6; hi - выходная координата исполнительного механизма 17; ДЬ - изменение выходной координаты элемента сервопривода 6 и исполнительного механизма 17 за один паг подстройки; Ь|.1ч;,к, - максимальное значение выходной координаты Ни элемента 14 при конкретном срабатывании. Самонастраивающееся устройство состоит из контура 1 управления включающего чувствительный элемент 2, датчик 3. импульсный элемент 4, звено 5 задержки, серЕЮПривод 6 и объект управлепия - трактор 7, контура 8 самонастройки, включающего импульсный элемент 9, анализатор 10, исполнительный механизм 11, первой дополнительной цепи 12 управлепия, включающей звено 13 задержки, сервопривод 14, и второй дополнительной цепи 15 управления, включаюп 1,ей звено 16 и исполнительный механизм 17.
Элементы 2-7 соединены последовательно, а выход трактора 7 соединен обратной связью с входом чувствительного элемента 2. Э.тементы 9-11 соединены последо- Baix 4btio, при этом вход элемента 9 соединен с вы.ходом элемента 4, выход элемента 1 1 - с вторым входом элемента 4, второй вход элемента 10 соединен с выходом элемента 2.
Элементы 13 и 14 первой дополнительной цепи 12 соединены последовательно, выход элемента 14 соединен с другим входом трактора 7, вход элемента 13 соединен с выходом элемента 4. Элементы 16 и 17 второй дополнительной цепи 15 соединены последовательно, при этом выход элемента 17 соединен с выходом сервопривода 6, а вход элемента 16 соединен с выходом элемента 4. Чувствительный элемент 2 может быть выполнен в виде механического копира или
любого другого устройства, регистрирующего отклонения от необходимого положения. Датчик 3 выполняет роль включающего элемента и имеет двухпозиционную характеристику. Рассматривается один управляемый борт трактора 7. Импульсный элемент 4 преобразует сигнал датчика 3 в импульсный сигнал. Звено 5 задержки пропускает импульспый сигнал элемента 4 без изменения начала импульса и задерживает его окончание на постоянный период времени T.S. Таким образом, длительность управляющего сигнала, поступающего на сервопривод 6, равна; Т(1 Т4+ TS, где т - длительность управляющего импульса элемента 3; 1-, - время задержки звена 4.
Сервопривод 6 является исполнительным механизмом контура 1 управления. Он воздействует на вход 7 управления.
Импульсный элемент 9 контура 8 са.мо- настройки соединен с вторым выходом импульсного элемента 4 и в момент окончания времени паузы э, 1емента 4 вырабатывает импульсный сигпал постоянной длительности. Анализатор 10 представляет собой трех- позиционпый элемент со значениями; -1; 0; -1-1. Исполнительный элемент 1 1 может быть выполнен в виде реверсивного щагового двигателя или любого другого устройства, обеспечивающего соответствующую характеристику, папример вычислительного устройства, определяющего длительность импульса э.темента 4 в соответствии с формулой:
иm
Т4 V дг-- У
(-1
AT,
где Лт - постоянный период времени, определяющий таг пастройки; п - количество сигналов, поступаю- пщх от анализатора И) па эле.мент 1 I с но;1ожите,;1ьны.м знаком; m-количество сигналов, поступающих от анализатора 10 на э.темент 1 1 с отрицательным знаком. Элемент 1 1 соединен с подстроечным органом (не ноказап) 7 управления. Звено 13 задержки задерживает начало прохождения импульсного сигнала 4 на постоянное время Т|.-. Таким образом, длительность управляющего имнульсного сигнала, поступаюп 1его па дополнительный сервопривод 14, опреде.тяется выражением:
т 14 Т.1 TI;J .
Задержка окончания действия имнульсного сигнала элемента 4 в контуре 1 унрав- ления звеном 5 и задержка начала прохождения импульсного сигнала элемента 4 звеном 13 задержки обеспечивает необходимую последовательность срабатывания сервоприводов 6 и 14. Сначала включается сервопривод 6, затем в случае, если длительность Т4 становится больще тьз, срабатывает сервопривод 14. В момент окончания действия унравляюнхего импульса сначала
отключается сервопривод 14, а затем - сервопривод 6.
Вторая дополнительная цепь 15 содержит звено 16 задержки и исполнительный элемент 17. Звено 16 задержки представляет собой реле времени. Входом звена 16 является выход звена 4. При поступлении сигнала с импульсного элемента 4 на звено 16 выполняется операция
Т4 Т|6 Ti7,
где Т4 - длительность и.мпульса элемента 4;
Ti6 -л лительность времени задержки звена 16;
Ti7-входной сигнал исполнительного механизма 17.
Сигнал Т|7 может иметь положительное и отрицательное значения. Если Т4 TIB. то Ti7 имеет положительное значение, если 16, то Ti7 имеет отрицательное значение.
Исполнительный .механизм 17 может быть выполнен в виде реверсивного шагового двигателя, срабатывающего при поступлении на его вход сигнала Т|7. При положительном Ti7 исполнительный механизм 17 перемещает выходной орган (вал, рейку) в одну сторону, а при отрицательном Т|7- в другую сторону. Вместо шагового привода могут быть применены и другие виды приводов, как, например, электрические, так и гидравлические с пропорциональным пере- .мещением выходного вала или рейки в заВИСИ.МОСТИ от Ti7.
Выход элемента 17 представляет собой упор, перемещаемый валом или рейкой, и изменяет предельную величину пере.меще- ния выходного штока сервопривода 6, за счет чего изменяется степень воздействия сервопривода 6 на механизм поворота трактора 7. При увеличении угловой скорости поворота трактора 7 выходной сигнал элемента 17 (упор) уменьшает величину перемещения штока сервопривода 6, а при уменьшении угловой скорости поворота увеличивает это перемещение.
Предлагаемое устройство работает следующим образом.
При нормальной скорости поворота трактора 7, например, при достаточно большом усилии на крюке система работает как самонастраивающаяся, так как величина Т4 мала, меньше Т|з и равна Tie, поэтому сигнал на сервопривод 14 не проходит или его длительности недостаточно для срабатывания сервопривбда 14. Кроме того, так как Т4 Ti6. сигнал на элемент 17 не проходит и он остается в одном положении. В этом случае сигнал от чувствительного элемента 2 через элементы 2-6 поступает на трактор 7.
0
5
0
5
0
5
0
5
Происходит управление трактором 7 при постоянном значении f,элемента 4. При уменьшении угловой скорости поворота трактора 7 (случай, когда выходной cnrna,i элемента 17 равен нулю и ход штока сервопривода 6 происходит на полную величину) начинает увеличиваться значение т.|, за счет срабатывания контура 8 самонастройки. Когда величина Т4 возрастает до такой степени, что его длительность станет больше времени запаздывания С,, звена 13 задержки в работу подключается дополнительный сервопривод 14, который начинает действовать на остановочный тормоз (другой вход) объекта 7 управления, увеличивая угловую скорость поворота трактора. Трактор 7 начинает управляться, кроме контура 1 управления, еще и дополнительной цепью 12, состоящей из элементов 13 и 14. Б этом случае положение механизма 17 не изменяется, так как он находится в предельном состоянии по отношению к сигналу Ti7 и ход П1тока сервопривода 6 не изменяется, а увеличени.е скорости поворота за счет подключения дополнительной цепи 12 не превышает значений, при которых начинает срабатывать вторая дополнительная цепь 15.
Если будет происходить увеличение угловой скорости поворота выше предельного значения (дополнительная цепь 12. состоящая из элементов 13 и 14, отключена ввиду того, что т, меньше значенш , необходимых для ее срабатывания), то сигна.ч будет подаваться на элемент 17 со знаком, обеспечивающим перемепхение вЬ)1хода элемепта 17 в сторону уменьп1ения хода П1тока сервопривода 6, за счет этого ограничивается нарастание угловой скорости поворота трактора 7, а следовательно, будет уменьшаться разброс величины ошибки углового поворота трактора 7 при его поворотах.
Формула изобретения
Самонастраиваюн1ееся устройство автоматического направления движения трактора по авт. св. ,9 1230480, отличающееся тем, что, с целью повышения качества вождения гусеничного трактора, устройство снабжено второй дополнительной цепью управления, содержащей звено задержки и исполнительный механизм, соединенные пос, 1едо- вательно, при этом звено задержки соединено с выходом импульсного э,темента контура управления, а исполнительный механизм связан с выходом сервопривода контура управления посредством управляемого упора.
-Л
-4-аТ
4
Ti,f(n}
-t
п
9
t
W
LJ
/
с
I .I
J7/L
ери г.2
срие.З
фа.Б
Редактор Л. Лсжмина Заказ 1232/1
Составитель С. Заруцкий
Техред И. ВересКорректор Л. Зимокосов
Тираж 630Подписное
ре,. аз izjz. iТираж 630, nj,,,,u
Гос дарственного комнтета ((.(. но делам нзобретеннй н открь I 13035. Л осква. Ж Зо, Раушская наб., д. 4,5
м нзобретеннй н открь наб., д. 4,5
Ужго)()д, л. Проектная, 4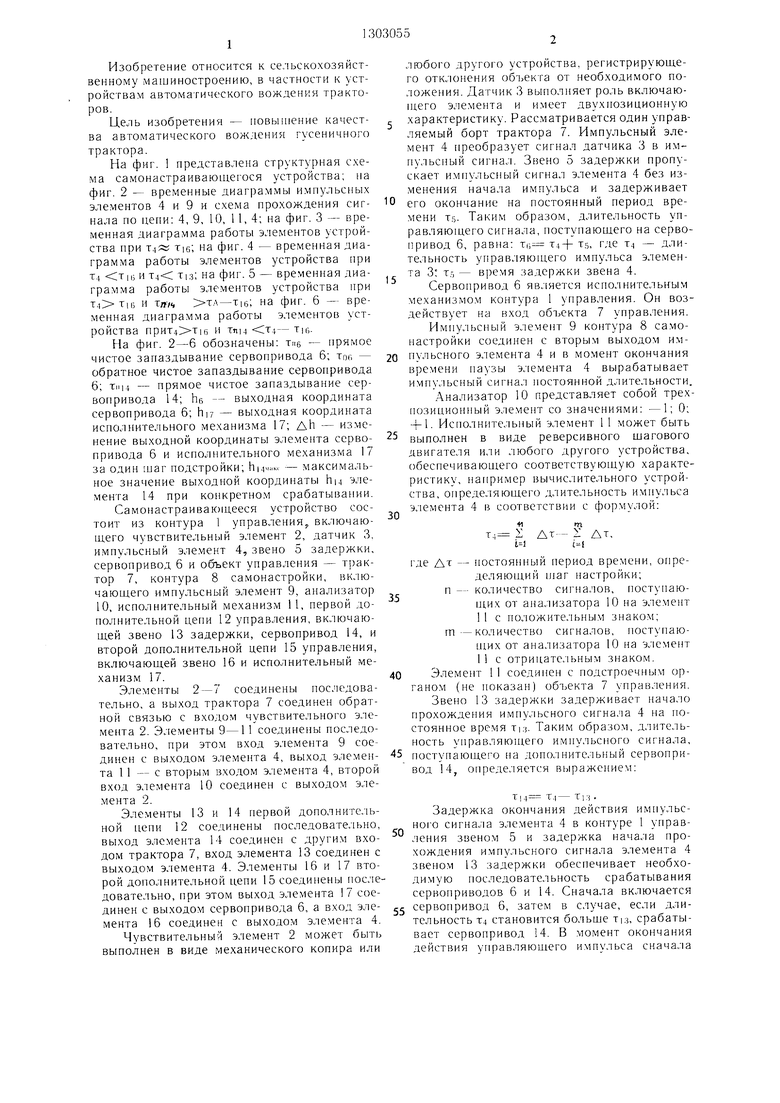
Изобретение относится к се, 1ьско о- зяйствеиному ман1иностроению. Цель изобретения - г101 1 Н1ение качества автоматического вождения. Устройство содержит контур управления 1, контур самонастройки 8, первую ),1ните, 1ьную нень 12 у11рав. 1ен1 я и вторую дог1о, 1ните,1ьную цепь 15 унравле- ния. К,онтур унрав, 1ения 1 содержит чувстви- те, 1ьный э.чемент (ЧЭ) 2, датчик 3, и.мнульс- ный э.чемент 4, звено задержки 5, сервопривод () и обьект унравления (ОУ) 7. Первая донолните.пьная uetih 12 )ав. 1ения вк.помает звено 13 задержки и сер1и))ивод 14. Вторая доно. 1нито.1ьная нень 15 унравления содержит звено 16 задержки и исн(),1ните,1ь- ный .ме.ханизм 17. Элемент) в каждом контуре i в КаЖДО | , носледовате,. Откло е не ОУ7 от базовой Л) воспри имается 432 и обрабат)вается еерво риводо 1 6, ОУ7 возвра 1ается а за- траектор 1 о движе ия. ма, , 1е с ЧЭ2 срабат вает конту 1 само- астройк 1 8 и на уве, ичен1 е тловой скорост 1()ворота ОУ7. едоста- точно быстро.м довороте ОУ7 ia заданнхчо траекторию включается первая до 1олнитоль- 1ая 12 . 1е)Я. Она и)здейст1 уе1 а ОСТа ОВОЧНЫЙ тормоз - iiTO|)() i )()Д ОУ7. .)Ном )ii ско- г оворота срабг, вторая , , 1,еГ) 15 у 1раВЛе 1Я. ()а 5()ЗДеЙ СТВуеТ а СерВО р 1ВОДа 6 в CTOpO iy соответству О1це Ч) (1я д. .хода. ПрОИС.ХОДИТ НЗМСНеН 1е уГ ,ОВОЙ СКОрОСТ 1 )- рота от номпна,чьн()й. 6 ил. (О (Л 75 со о оо о ел ел м
| Самонастраивающееся устройство автоматического направления движения трактора | 1984 |
|
SU1230480A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
