:rrdlJ±rlI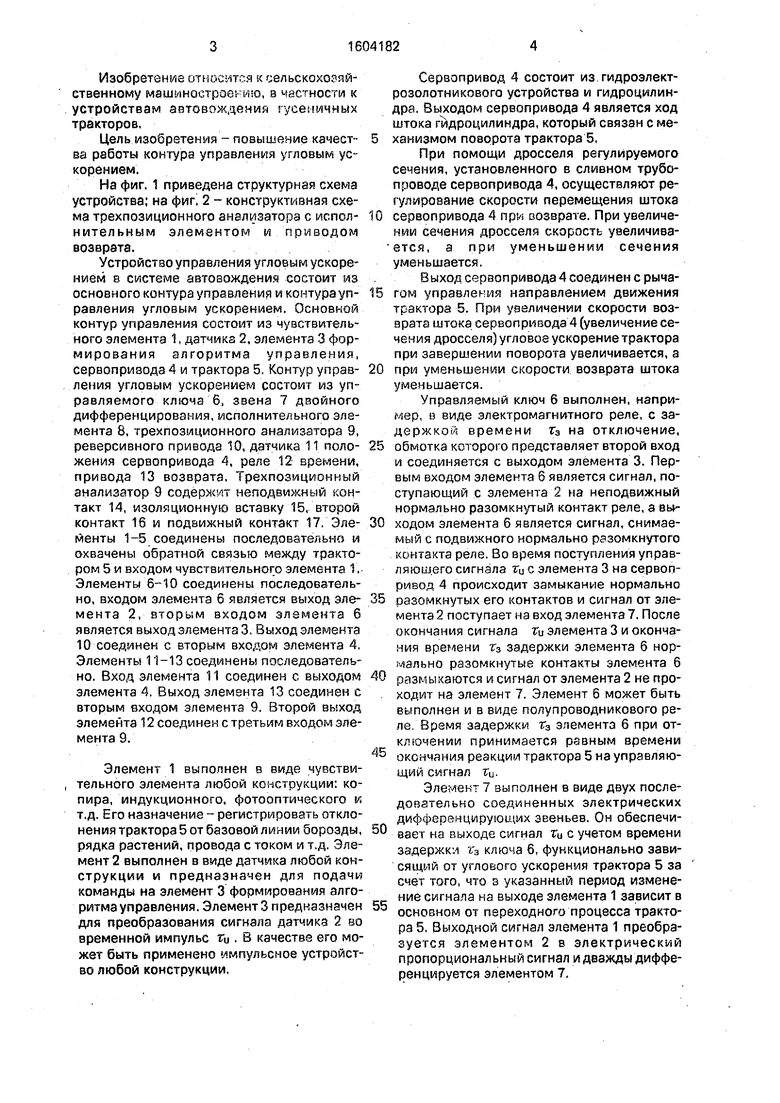

Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам автовождения гусеничных тракторов. Цель изобретения - повышение качества работы контура управления угловым ускорением. Устройство содержит основной контур управления и контур управления угловым ускорением. Основной контур управления содержит соединенные последовательно чувствительный элемент 1, датчик 2, элемент 3 формирования алгоритма управления, сервопривод 4 и трактор 5. Контур управления угловым ускорением содержит соединенные последовательно датчик 11 положения, реле 12 времени, привод 13 возврата, трехпозиционный анализатор 9 и реверсивный привод 10. Выход реверсивного привода 10 соединен с вторым входом сервопривода 4. Вход датчика 11 положения соединен с выходом сервопривода 4. Второй выход реле 12 времени соединен с вторым входом трехпозиционного анализатора. Положительный эффект достигается за счет того, что устройство снабжено звеном 7 двойного дифференцирования. Звено 7 двойного дифференцирования соединено выходом с третьим входом трехпозиционного анализатора 9 через исполнительный элемент 8. Вход звена 7 соединен через управляемый ключ 6 с выходами датчика 2 и элемента 3 формирования алгоритма управления. Повышение качества работы контура управления угловым ускорением достигается за счет повышения помехозащищенности устройства. Помехозащищенность обеспечивается введением в схему устройства звена 7 двойного дифференцирования и управляемого ключа 6. Последний осуществляет подачу сигнала на трехпозиционный анализатор 9 только в момент подачи управляющего сигнала на сервопривод 4. 2 ил.
фае. /.
Изобретенме относится s сельскохозяйственному машмностробкию, в частности к устройствам автовождения гусеничных тракторов.
Цель изобратения повышение качества работы контура управления угловым ускорением.
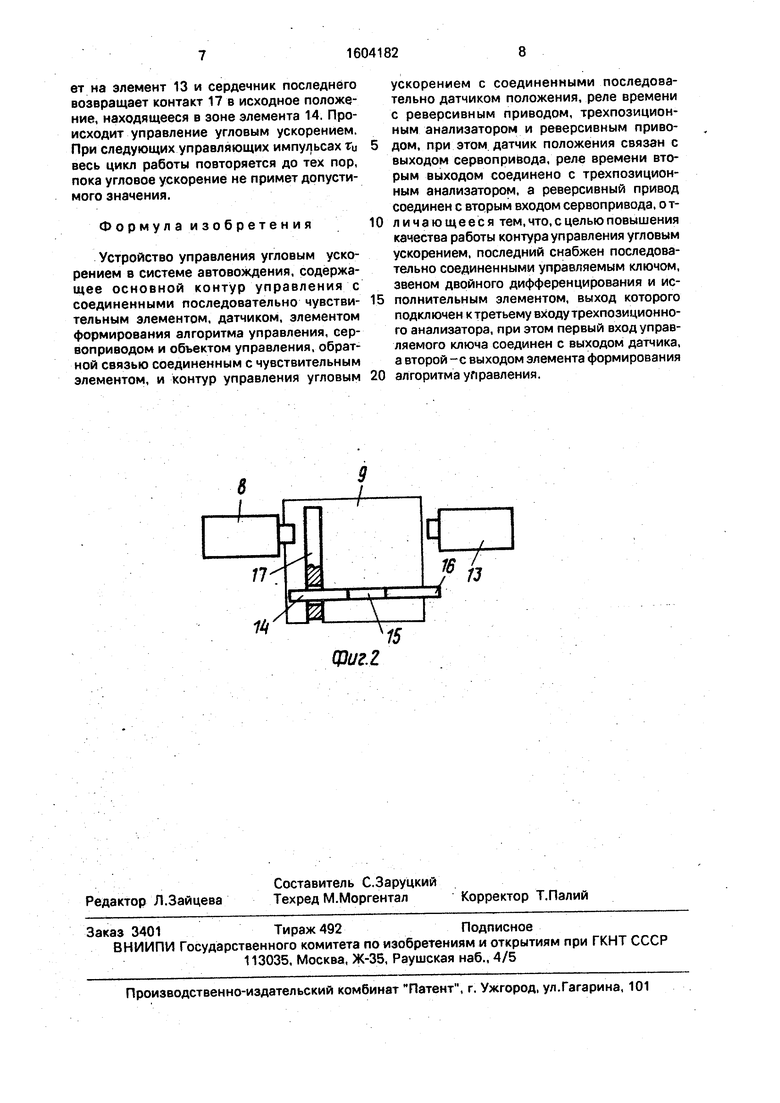
На фиг. 1 приведена структурная схема устройства; на фиг 2 - конструктивная схема трехпозиционного анализатора с испол- нительным элементом и приводом возврата.
Устройство управления угловым ускорением в системе автовождения состоит ыз основного контура управления и контура управления угловым ускорением. Основной контур управления состоит из чувствительного элемента 1, датчика 2, элемента 3 фор- мирования алгоритма управления, сервопривода 4 и трактора 5. Контур управления угловым ускорением состоит из управляемого ключа 6, звена 7 двойного дифференцирования, мсполнительного элемента 8. трехпозиционного анализатора 9, реверсивного привода 10, датчика 11 положения сервопривода 4. реле 12 времени, привода 13 возврата. Трехпозиционный анализатор 9 содержит неподвижный контакт 14, изоляционную вставку 15, второй контакт 16 и подвижный контакт 17, Элементы 1-5 соединены последовательно и охвачены обратной связью между трактором 5 и входом чувствительного элемента 1. Элементы 6-10 соединены последовательно, входом элемента 6 является выход элемента 2, вторым входом элемента 6 является выход элемента 3. Выход элерлента 10 соединен с вторым входом элемента 4, Элементы 11-13 соединены последовательно. Вход элемента 11 соединен с выходом элемента 4. Выход элемента 13 соединен с вторым входом элемента 9. Второй выход элемента 12 соединен с третьим входом элемента 9.
Элемент 1 выполнен в виде чувствительного элемента любой конструкции: копира, индукционного, фотооптического м т.д. Его назначение - регистрировать отклонения трактора 5 от базовой линии борозды, рядка растений, провода с током и т.д. Элемент 2 выполнен в виде датчика любой конструкции и предназначен для подачи команды на элемент 3 формирования алгоритма управления. Элемент 3 предназначен для преобразования сигнала датчика 2 во временной импульс Ти . В качестве его может быть применено импульсное устройство любой конструкции.
Сервопривод 4 состоит из гидроэлект- розолотникового устройства и гидроцилиндра. Выходом сервопривода 4 является ход штока гидроцилиндра, который связан с механизмом поворота трактора 5,
При помощи дросселя регулируемого сечения, установленного в сливном трубопроводе сервопривода 4, осуществляют регулирование скорости перемещения штока
сервопривода 4 при возврате. При увеличении сечения дросселя скорость увеличива- ется, а при уменьшении сечения уменьшается.
Выход сервопривода 4 соединен с рычагом управления направлением движения трактора 5. При увеличении скорости возврата штока сервопривода 4 (увеличение сечения дросселя) угловое ускорение трактора при завершении поворота увеличивается, а
при уменьшении скорости возврата штока уменьшается.
Управляемый ключ 6 выполнен, например, в виде электромагнитного реле, с задержкой времени Гз на отключение,
обмотка которого представляет второй вход и соединяется с выходом элемента 3. Первым входом элемента 6 является сигнал, поступающий с элемента 2 на неподвижный нормально разомкнутый контакт реле, а вы
ходом элемента 6 является сигнал, снимаемый с подвижного нормально разомкнутого контакта реле. Во время поступления управляющего сигнала Гц с элемента 3 на сервопривод 4 происходит замыкание нормально
разомкнутых его контактов и сигнал от элемента 2 поступает на вход элемента 7. После окончания сигнала Ги элемента 3 и окончания времени Гз задержки элемента 6 нор- адально разомкнутые контакты элемента 6
размыкаются и сигнал от элемента 2 не про- ходит на элемент 7. Элемент 6 может быть выполнен и в виде полупроводникового реле, Время задержки Гз элемента 6 при отключении принимается равным времени
окончания реакции трактора 5 на управляющий сигнал ТиЭле; ент 7 выполнен в виде двух последовательно соединенных электрических дифференцирующих звеньев. Он обеспечи
вает на выходе сигнал Ги с учетом времени задержки ъ з ключа 6, функционально зависящий от углового ускорения трактора 5 за счет того, что в указанный период изменение сигнала на выходе элемента 1 зависит в основном от переходного процесса трактора 5. Выходной сигнал элемента 1 преобразуется элементом 2 в электрический пропорциональный сигнал и дважды дифференцируется элементом 7,
Исполнительный элемент 8 выполнен в виде электромагнита с подпружиненным сердечником. Перемещение сердечника пропорционально величине сигнала на выходе элемента 7, т.е. пропорционально ус- корению трактора 5.
ТрехпозиционныР анализатор 9 выполнен в вмде напрайл{;ю1цей и подвижного контакта 17. Направляющая содержит неподвижный контакт 14. изоляционную вставку 15 и второй контакт 16. Подвижный контакт 17 может перемещаться вдоль направляющей и оставаться в фиксированном положении. Анализатор 9 обеспечивает трехпозиционную характеристику, анало- гичную характеристике реле с зоной нечувствительности со значениями + 1, О, -1. Перемещение контакта 17 по направляющей обеспечивается исполнительным элементом 8 и приводом 13 возврата.
Реверсивный привод 10 представляет собой привод с характеристикой, соответствующей характеристике тягового двигателя, Выходной орган реверсивного привода 10 связан с регулирующим органом дросселя сервопривода 4. Датчик 11 положения сервопривода выполнен в виде концевого выключателя, контакт которого замыкается, когда шток сервопривода 4 занимает исходное положение, и размыкается при начале рабочего хода сервопривода 4.
Реле 12 времени выполнено на основе реле времени любой конструкции. Оно вырабатывает импульс опроса Го , который через второй выход элемента 12 поступает на третий вход элемента 9. Кроме того реле 12 времени после окончания имульса опроса TO вырабатывает импульс сброса Гс , который через первый выход реле 12 поступает на вход привода 13 возврата. Привод 13 возврата выполнен в виде электромагнита с подпружиненным сердечником. Перемещение его сердечника является выходом элемента 13. Исполнительный элемент 8 и привод 13 возврата установлены таким об- разом, что их сердечники могут перемещать подвижный контакт 17 (фиг. 2).
Все элементы схемы могут быть выполнены по аналогии на основе бесконтактных электронных устройств.
Устройство работает следующим образом.
Основной контур управления трактором 5 производит его автовождение. При этом элемент 1 регистрирует отклонение от базы, элемент 2 преобразует сигнал элемента 1 в электрический сигнал и подает команду на элемент 3. Последний преобразует сигнал в управляющий импульс Гц .
длительность которого определяется алгоритмом управления, заложенного в элемент 3, Под действием управляющего импульса шток сервопривода 4 перемещается и воздействует на механизм поворота трактора 5. После прекращения сигнала Гц шток сервопривода 4 возвращается в исходное положение. Поворот трактора 5 прекращается. Так же система срабатывает при следующих отклонениях от базы. Происходит автоматическое вождение трактора.
Контур управления угловым ускорением работает следующим образом.
При каждом управляющем сигнале Гц за счет сигнала элемента 3 происходит включение нормально разомкнутых контактов элемента 6 на время, равное Ги Ч- Тз. В течение этого времени сигнал от элемента 2 через элемент 6 поступает на элемент 7, где он дважды дифференцируется, в результате чего на его выходе формируется сигнал, про- порциональный угловому ускорению трактора 5. Этот сигнал подается на исполнительный элемент 8, сердечник которого выдвигается на величину, пропорциональную угловому ускорению трактора 5. и пере- мещает подвижный контакт 17 трехпозиционного анализатора 9. После уменьшения углового ускорения сердечник элемента 8 возвращается в исходное положение, а подвижный контакт 17 остается в положении, соответствующем максимальному угловому ускорению трактора 5. Подвижный контакт 17 может занимать положения над элементами 14, 15 или 16. Если контакт 17 находится в зоне элемента 14, ускорение мало. Если контакт 17 находится а зоне элемента 15, то ускорение в норме. Если контакт 17 находится в зоне элемента 16, то ускорение больше нормы.
После возврата сервопривода 4 в исходное положение срабатывает датчик 11 положения, который подает сигнал на реле 12 времени. Оно вырабатывает импульс опроса Го , который подается на третий вход трехпозиционного анализатора 9, Импульс опроса Го поступает на реверсивный привод 10, который изменяет сечение регулируемого дросселя, изменяя тем самым величину скорости возврата штока сервопривода 4, т.е. изменяя угловое ускорение тракто|эа 5 при следующих управляющих импульсах и с элемента 3. Если контакт 17 находится над элементом 15, то сигнал Го не проходит на элемент 10 и угловое ускорение трактора 5 не изменится.
После окончания импульса Го реле 12 вырабатывает импульс Гс, который поступает на элемент 13 и сердечник последнего возвращает контакт 17 в исходное положение, находящееся в зоне элемента 14. Происходит управление угловым ускорением. При следующих управляющих импульсах Ти весь цикл работы повторяется до тех пор, пока угловое ускорение не примет допустимого значения.
Формула изобретения
Устройство управления угловым ускорением в системе автовождения, содержащее основной контур управления с соединенными последовательно чувствительным элементом, датчиком, элементом формирования алгоритма управления, сервоприводом и объектом управления, обратной связью соединенным с чувствительным элементом, и контур управления угловым
03иг.2
ускорением с соединенными последовательно датчиком положения, реле времени с реверсивным приводом, трехпозицион- ным анализатором и реверсивным приводом, при этом датчик положения связан с выходом сервопривода, реле времени вторым выходом соединено с трехпозицион- ным анализатором, а реверсивный привод соединен с вторым входом сервопривода, отличающееся тем, что, с целью повышения качества работы контура управления угловым ускорением, последний снабжен последовательно соединенными управляемым ключом, звеном двойного дифференцирования и исполнительным элементом, выход которого подключен к третьему входу трехпозиционно- го анализатора, при этом первый вход управляемого ключа соединен с выходом датчика, а второй -с выходом элемента формирования
алгоритма управления.
| Устройство управления трактором | 1986 |
|
SU1521318A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
