Фиг. 1
Изобретение относится к сельскохозяйственному производству, в частности к устройствам автоматического В9ждения транспортного средства, и может быть использовано в различных отраслях техники для обеспечения самонастройки регуляторов.
Цель изобретения - повышение оперативности и точности управления.
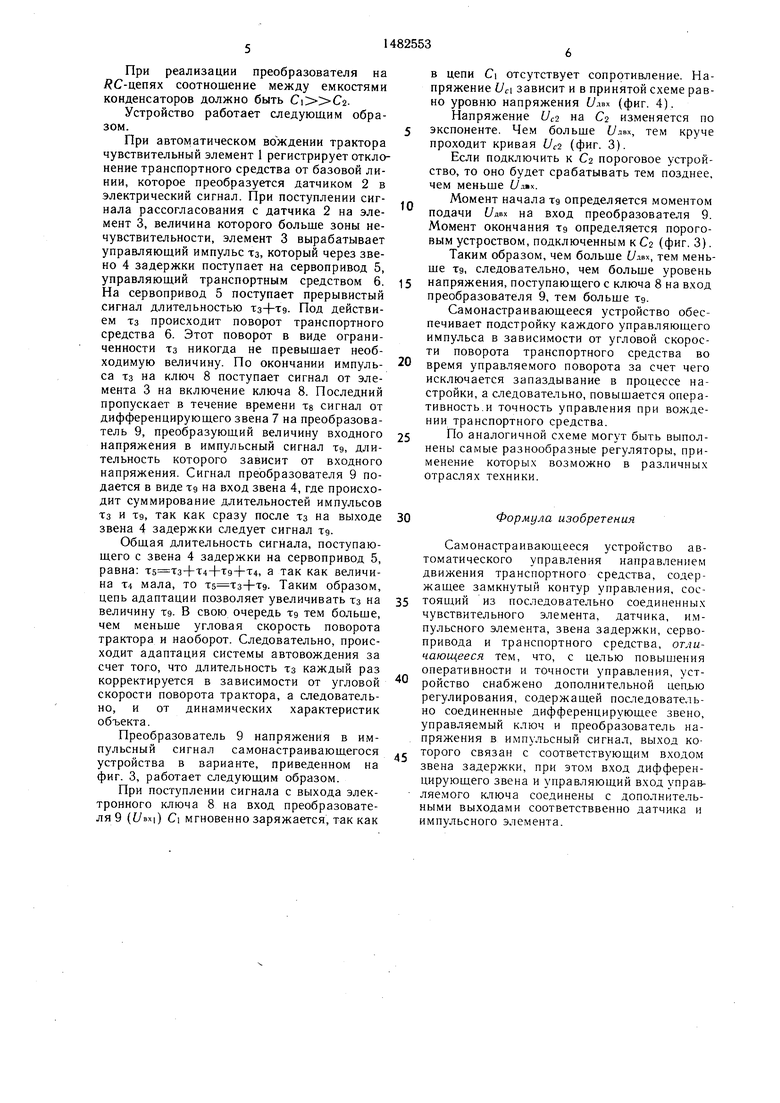
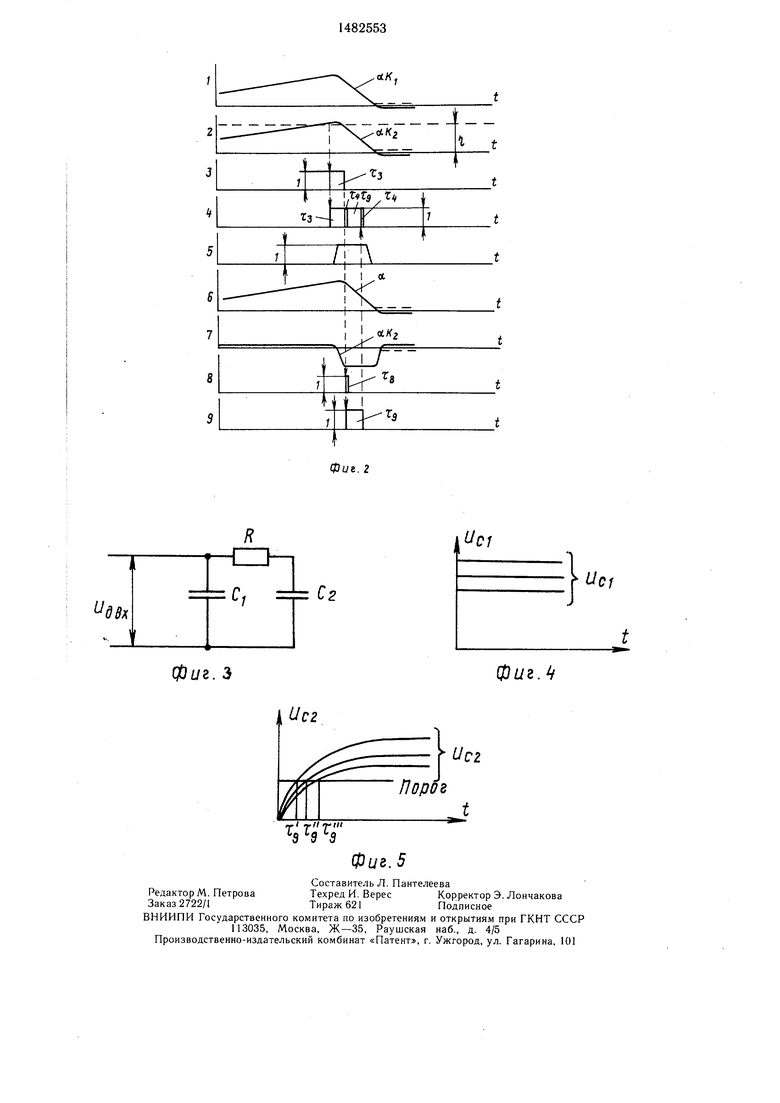
На фиг. 1 представлена структурная схема устройства для одного управляемого борта транспортного средства (для другого управляемого борта схема аналогична); на фиг. 2 - временные диаграммы работы элементов и блоков устройства; на фиг. 3 - принципиальная схема / С-цепей элемента 9; на фиг. 4 - диаграмма заряда С при раз- личных значениях напряжения на фиг. 5 - то же, для С%.
Самонастраивающееся устройство автоматического управления направлением движения транспортного средства состоит из контура управления, включающего соединенные последовательно чувствительный элемент 1, датчик 2, импульсный элемент 3, звено 4 задержки, сервопривод 5, транспортное средство 6 с обратной связью между трактором и чувствительным элемен- том 1, и дополнительной цепи регулирования, включающей дифференцирующее звено 7, управляемый ключ 8 и преобразователь 9 напряжения в импульсный сигнал, соединенных последовательно. Вход дифференцирующего звена 7 соединен с выхо- дом датчика 2, другой вход управляемого .ключа 8 связан с другим выходом импульсного элемента 3, выход преобразователя 9 напряжения в импульсный сигнал соединен с входом звена 4 задержки.
В качестве чувствительного элемента 1 ис- пользуется механический копир или любое другое устройство. Элемент 1 предназначен для фиксирования отклонения трактора от базовой линии, например борозды.
Датчик 2 выполнен в виде линейно- пропорционального элемента: потенциометра, индукционного, трансформаторного или других устройств. В системах без механической связи с базовой линией (борозда, рядок растений и др.), например в индукционных с вождением вдоль провода с то- ком или других аналогичных устройств, элемент 1 и 2 объединены в один элемент - датчик, который непосредственно преобразует измеряемую величину отклонения в электрический сигнал. Отклонение от базовой линии определяется как значение выходного сигнала, превышающего установленный уровень - зону нечувствительности. Датчик регистрирует сумму сигналов углового и линейного отклонения объекта от базовой линии.
Импульсный элемент 3 вырабатывает импульс 1з постоянной длительности при поступлении сигнала отклонения с датчика 2. Элемент 3 выполняется на основе мультивибраторов или других аналогичных устройств. Длительность импульсов элемента 3 не изменяется во время работы устройства, но может регулироваться во время наладки и ремонта. Длительность тз принимается такой, что при любом сочетании динамических характеристик транспортного средства 6 как объекта управления поворот транспортного средства не превышает необходимого значения. Длительность ориентировочно равна 0,05-0,15 с.
Звено 4 задержки выполняет роль сумматора длительностей импульса тз и импульса, поступающего от преобразователя 9 (-тд). Время задержки Т4 звена 4 ориентировочно равно 0,001 с и на много меньше тз. Поэтому Т4 не оказывает существенного значения на длительность импульса тз после прохождения его через звено 4 задержки на сервопривод 5.
В качестве сервопривода 5 используется гидравлический привод с гидроэлектрозолот- никовым устройством. В качестве сервопривода 5 может использоваться любой вид привода. Сервопривод 5 связан с механизмом поворота транспортного средства 6 и обеспечивает его управляемый поворот.
Дифференцирующее звено 7 выполняется на основе / С-цепей. На выходе этого звена сигнал пропорционален скорости изменения выходного сигнала датчика 2. Так как во время управляемого поворота составляющая выхода датчика 2 от угловой скорости поворота объекта во много раз превышает составляющую от скорости изменения линейной координаты, то и на выходе дифференцирующего звена 7 в определенный момент времени сигнал преимущественно пропорционален угловой скорости поворота транспортного средства. В определенный момент времени этот сигнал используется для соответствующего увеличения (удлинения) Тз.
Управляемый ключ 8 представляет собой реле времени, которое при наличии входного сигнала тз с элемента 3 в течение периода времени те порядка 0,001 с пропускает сигнал с звена 7 на преобразователь 9. В качестве входного сигнала тз для ключа 8, поступающего с элемента 3, используется момент окончания импульса элемента 3 (начало паузы элемента 3).
Преобразователь 9 напряжения в импульсный сигнал преобразует величину напряжения сигнала, поступающего с выхода элемента 8, в импульсный сигнал тд, длительность которого тем меньше, чем больше величина напряжения, поступающего на вход преобразователя 9, а с уменьшением напряжения на входе преобразователя 9 длительность импульсного сигнала на его выходе увеличивается. Преобразователь 9 выполняется на ЯС-цепях (фиг 3) или на основе вычислительных устройств.
При реализации преобразователя на / С-цепях соотношение между емкостями конденсаторов должно быть .
Устройство работает следующим образом.
При автоматическом вождении трактора чувствительный элемент 1 регистрирует отклонение транспортного средства от базовой линии, которое преобразуется датчиком 2 в электрический сигнал. При поступлении сигнала рассогласования с датчика 2 на элемент 3, величина которого больше зоны нечувствительности, элемент 3 вырабатывает управляющий импульс тз, который через звено 4 задержки поступает на сервопривод 5, управляющий транспортным средством 6. На сервопривод 5 поступает прерывистый сигнал длительностью тз+тд. Под действием тз происходит поворот транспортного средства 6. Этот поворот в виде ограниченности тз никогда не превышает необходимую величину. По окончании импуль- са тз на ключ 8 поступает сигнал от элемента 3 на включение ключа 8. Последний пропускает в течение времени Tg сигнал от дифференцирующего звена 7 на преобразователь 9, преобразующий величину входного напряжения в импульсный сигнал тд, длительность которого зависит от входного напряжения. Сигнал преобразователя 9 подается в виде тэ на вход звена 4, где происходит суммирование длительностей импульсов тз и тэ, так как сразу после тз на выходе звена 4 задержки следует сигнал тд.
Общая длительность сигнала, поступающего с звена 4 задержки на сервопривод 5, равна: Т5 тз+Т4+тд+Т4, а так как величина Т4 мала, то тз тз+тэ. Таким образом, цепь адаптации позволяет увеличивать тз на величину тэ. В свою очередь тд тем больше, чем меньше угловая скорость поворота трактора и наоборот. Следовательно, происходит адаптация системы автовождения за счет того, что длительность тз каждый раз корректируется в зависимости от угловой скорости поворота трактора, а следовательно, и от динамических характеристик объекта.
Преобразователь 9 напряжения в импульсный сигнал самонастраивающегося устройства в варианте, приведенном на фиг. 3, работает следующим образом.
При поступлении сигнала с выхода электронного ключа 8 на вход преобразователя 9 (Ј/вх|) С мгновенно заряжается, так как
в цепи Ci отсутствует сопротивление. Напряжение Uc зависит и в принятой схеме равно уровню напряжения t/двх (фиг. 4).
Напряжение Uci на Сч изменяется по экспоненте. Чем больше б двх, тем круче проходит кривая UC2 (фиг. 3).
Если подключить к Ci пороговое устройство, то оно будет срабатывать тем позднее, чем меньше t/д.
Момент начала тд определяется моментом подачи t/двх на вход преобразователя 9. Момент окончания тд определяется пороговым устроством, подключенным к Cz (фиг. 3).
Таким образом, чем больше t/двх, тем меньше тд, следовательно, чем больше уровень напряжения, поступающего с ключа 8 на вход преобразователя 9, тем больше т.д.
Самонастраивающееся устройство обеспечивает подстройку каждого управляющего импульса в зависимости от угловой скорости поворота транспортного средства во время управляемого поворота за счет чего исключается запаздывание в процессе настройки, а следовательно, повышается оперативность и точность управления при вождении транспортного средства.
По аналогичной схеме могут быть выполнены самые разнообразные регуляторы, применение которых возможно в различных отраслях техники.
Формула изобретения
Самонастраивающееся устройство автоматического управления направлением движения транспортного средства, содержащее замкнутый контур управления, состоящий из последовательно соединенных чувствительного элемента, датчика, импульсного элемента, звена задержки, сервопривода и транспортного средства, отличающееся тем, что, с целью повышения оперативности и точности управления, устройство снабжено дополнительной цеп.ью регулирования, содержащей последовательно соединенные дифференцирующее звено, управляемый ключ и преобразователь напряжения в имп льсный сигнал, выход которого связан с соответствующим входом звена задержки, при этом вход дифференцирующего звена и управляющий вход управляемого ключа соединены с дополнительными выходами соответстввенно датчика и импульсного элемента.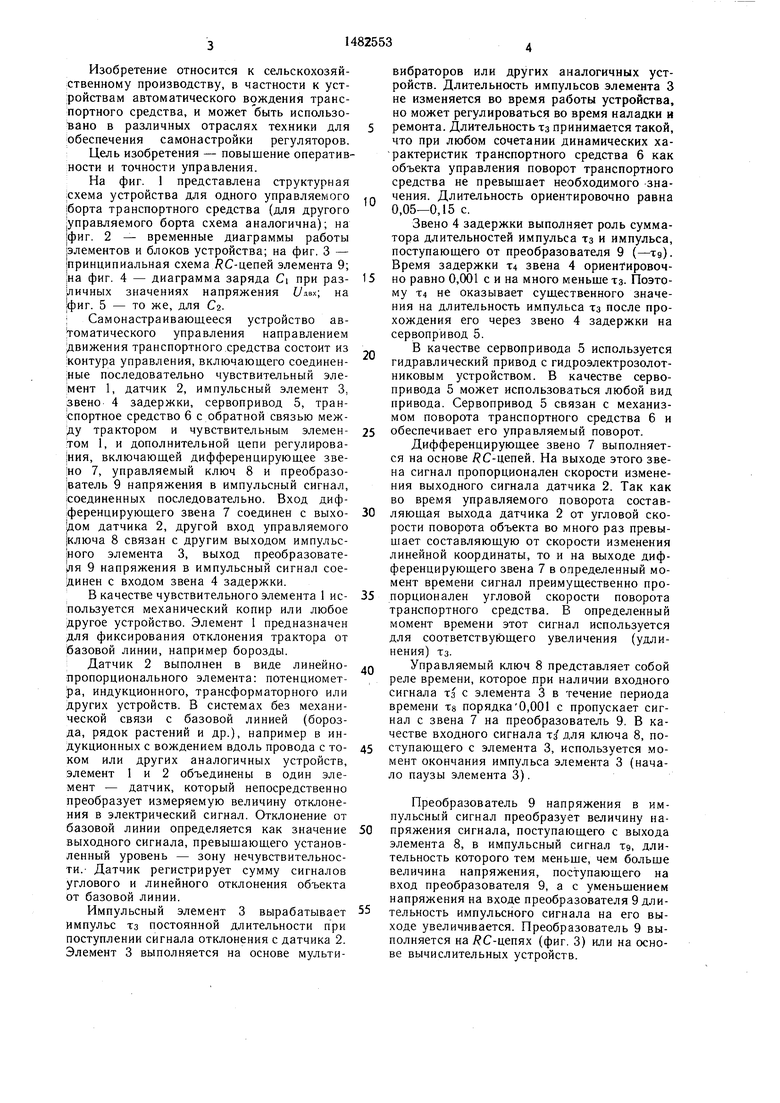
Изобретение относится к системам управления направлением движения транспортных средств. Цель изобретения-повышение оперативности и точности управления. Устройство содержит основной контур управления и дополнительную цепь регулирования. Основной контур управления включает чувствительный элемент 1 датчика 2 отклонения транспортного средства 6 от базовой линии. Датчик 2 связан через импульсный элемент 3 и звено задержки 4 с сервоприводом 5. В состав дополнительной цепи регулирования входят дифференцирующее звено 7, электронный ключ 8 и преобразователь 9 напряжения в импульсный сигнал. В случае отклонения транспортного средства 6 от базовой линии сигнал от чувствительного элемента 1 датчика 2 поступает на дифференцирующее звено 7 и импульсный элемент 3. В определенный момент ключ 8 дает разрешение на прохождение сигнала от звена 7 к преобразователю 9. Элемент задержки формирует сигнал, суммируя τ3+τ9. Собственная временная задержка элемента задержки незначительна и ей в процессе управления пренебрегают. Устройство обеспечивает подстройку каждого управляющего импульса в зависимости от значения угловой скорости поворота транспортного средства. 5 ил.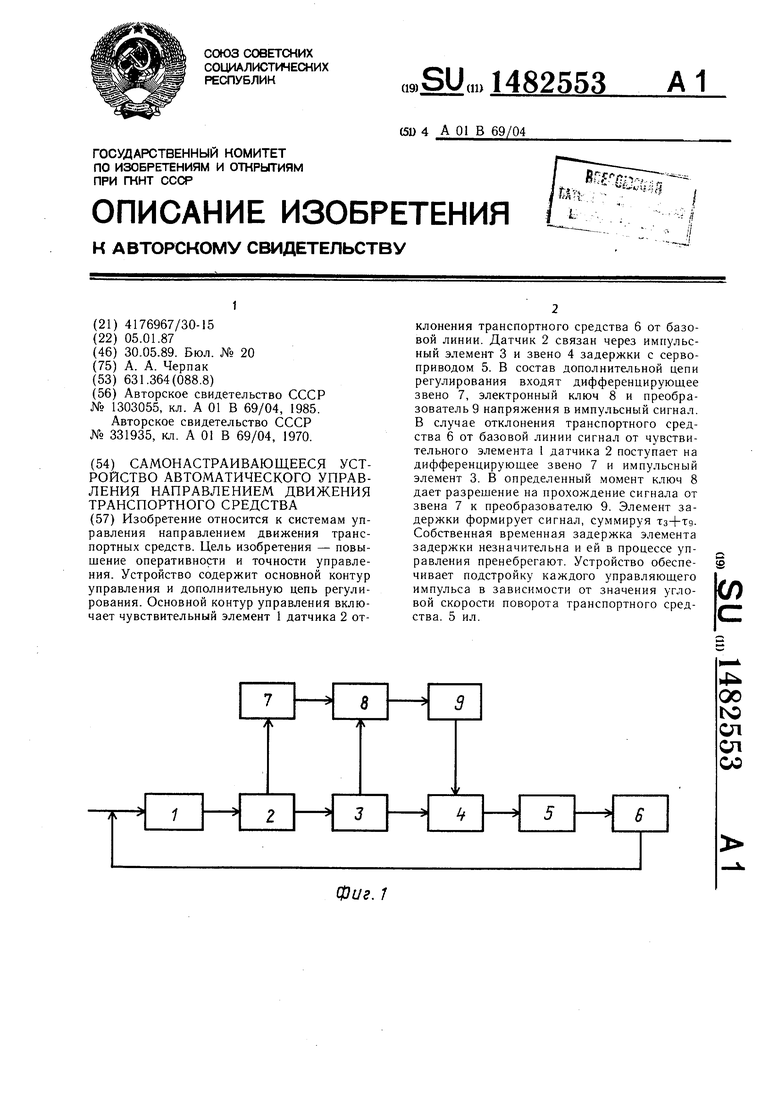
С2
Фиг. 3
- I -// ,ц
ls 1в Ls
Редактор М. Петрова Заказ 2722/1
Составитель Л Пантелеева Техред И ВересКорректор Э. Лончакова
Тираж 621Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-издательский комбинат «Патент, г Ужгород, ул. Гагарина, 101
Ucr
Фиг.4
Фиг.5
| Самонастраивающееся устройство автоматического направления движения трактора | 1985 |
|
SU1303055A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для МАРКИРОВКИ ЛЕСОМАТЕРИАЛОЕвсессюзил^ПАТ?НТ150-Т?;?К5'к::БИБЛ!-ЮТ;;-''Л | 0 |
|
SU331935A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
