7/7
Ч
8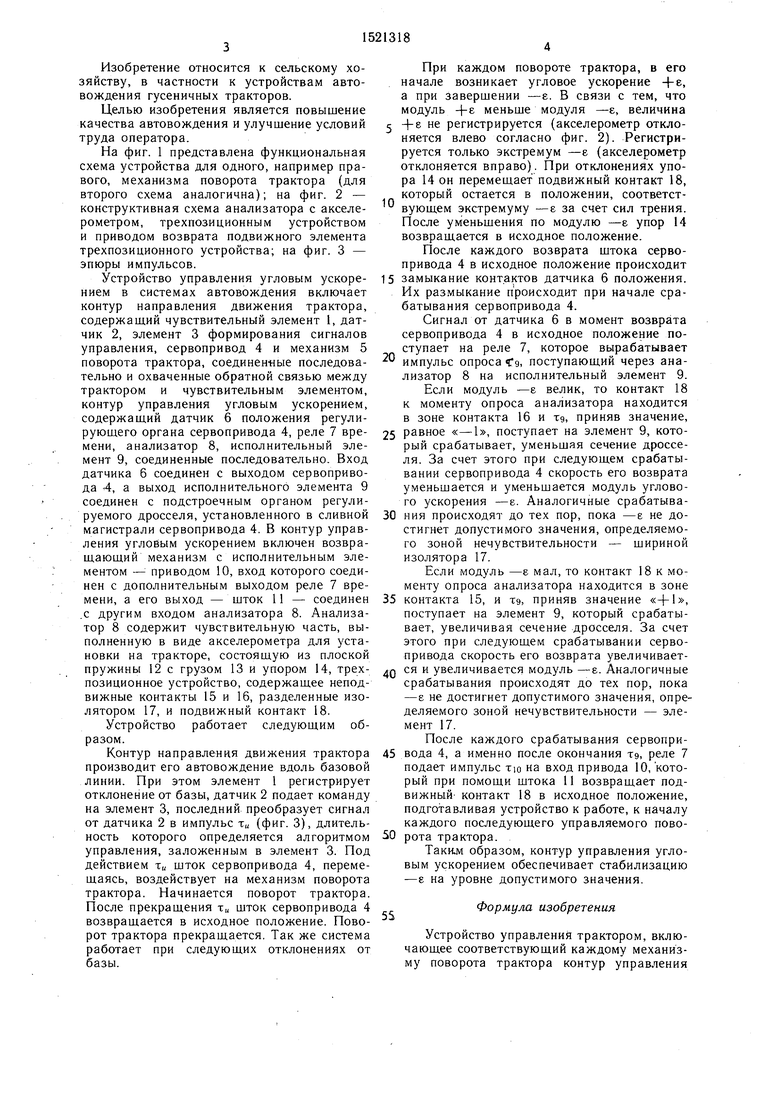
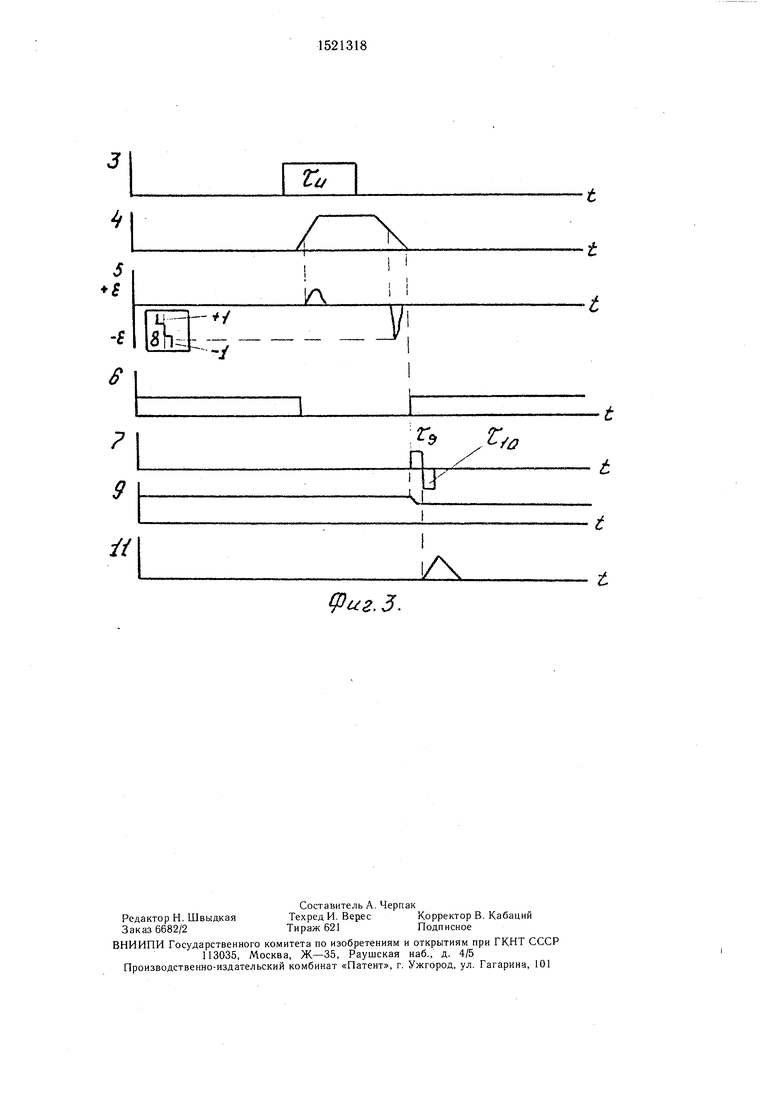
Изобретение относится к сельскому хозяйству, в частности к устройствам автовождения гусеничных тракторов. Целью изобретения является повышение качества автовождения и улучшение условий труда оператора. Устройство содержит чувствительный элемент 1, датчик 2, элемент 3 формирования сигнала управления, сервопривод 4, связанный с механизмом 5 поворота трактора. Контур управления угловым ускорением включает датчик 6 положения регулирующего органа сервопривода 4, реле 7 времени, анализатор 8, исполнительный элемент 9 и возвращающий механизм с исполнительным элементом-приводом 10. Чувствительный элемент 1 регистрирует отклонение трактора от базовой линии. Вырабатывается сигнал управления, который воздействует на механизм 5 поворота трактора. При каждом повороте трактора регистрируется экстремум углового ускорения, по величине которого вырабатывается сигнал управления, изменяющий скорость возврата сервопривода 4, что уменьшает модуль углового ускорения. Этот процесс будет происходить до тех пор, пока модуль углового ускорения не достигнет допустимого значения. 3 ил.
-
г. /
СД IsD
00 00
4
Изобретение относится к сельскому хозяйству, в частности к устройствам автовождения гусеничных тракторов.
Целью изобретения является повышение качества автовождения и улучшение условий труда оператора.
На фиг. 1 представлена функциональная схема устройства для одного, например правого, механизма поворота трактора (для второго схема аналогична); на фиг. 2 - конструктивная схема анализатора с акселерометром, трехпозиционным устройством и приводом возврата подвижного элемента трехпозиционного устройства; на фиг. 3 - эпюры импульсов.
Устройство управления угловым ускорением в системах автовождения включает контур направления движения трактора, содержащий чувствительный элемент I, датчик 2, элемент 3 формирования сигналов управления, сервопривод 4 и механизм 5 поворота трактора, соединен-ные последовательно и охваченные обратной связью между трактором и чувствительным элементом, контур управления угловым ускорением, содержаш,ий датчик 6 положения регулирующего органа сервопривода 4, реле 7 времени, анализатор 8, исполнительный элемент 9, соединенные последовательно. Вход датчика 6 соединен с выходом сервопривода 4, а выход исполнительного элемента 9 соединен с подстроечным органом регулируемого дросселя, установленного в сливной магистрали сервопривода 4. В контур управления угловым ускорением включен возвращающий механизм с исполнительным элементом - приводом 10, вход которого соединен с дополнительным выходом реле 7 времени, а его выход - шток 11 - соединен .с другим входом анализатора 8. Анализатор 8 содержит чувствительную часть, выполненную в виде акселерометра для установки на тракторе, состоящую из плоской пружины 12 с грузом 13 и упором 14, трех- позиционное устройство, содержащее неподвижные контакты 15 и 16, разделенные изолятором 17, и подвижный контакт 18.
Устройство работает следующим образом.
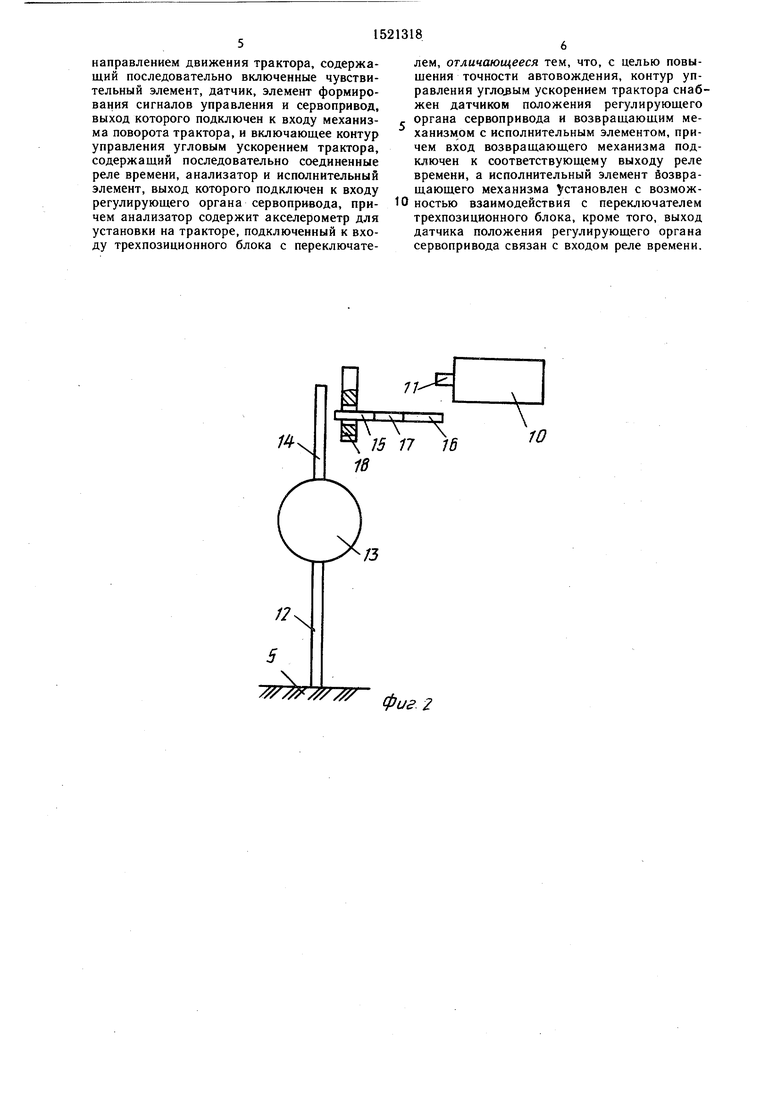
Контур направления движения трактора производит его автовождение вдоль базовой линии. При этом элемент 1 регистрирует отклонение от базы, датчик 2 подает команду на элемент 3, последний преобразует сигнал от датчика 2 в импульс т,, (фиг. 3), длительность которого определяется алгоритмом управления, заложенным в элемент 3. Под действием Ти шток сервопривода 4, перемещаясь, воздействует на механизм поворота трактора. Начинается поворот трактора. После прекращения Тц шток сервопривода 4 возвращается в исходное положение. Поворот трактора прекращается. Так же система работает при следующих отклонениях от базы.
При каждом повороте трактора, в его начале возникает угловое ускорение +е, а при заверщении -Ё. В связи с тем, что модуль меньще модуля -е, величина +S не регистрируется (акселерометр отклоняется влево согласно фиг. 2). Регистрируется только экстремум -е (акселерометр отклоняется вправо). При отклонениях упора 14 он перемещает подвижный контакт 18, который остается в положении, соответствующем экстремуму -е за счет сил трения. После уменьщения по модулю -е упор 14 возвращается в исходное положение.
После каждого возврата щтока сервопривода 4 в исходное положение происходит 5 замыкание контактов датчика 6 положения. Их размыкание п роисходит при начале срабатывания сервопривода 4.
Сигнал от датчика 6 в момент возврата сервопривода 4 в исходное положение поступает на реле 7, которое вырабатывает
0
0
импульс опроса Тэ, поступающий через анализатор 8 на исполнительный элемент 9.
Если модуль -е велик, то контакт 18
к моменту опроса анализатора находится
в зоне контакта 16 и тд, приняв значение,
5 равное «-1, поступает на элемент 9, который срабатывает, уменьщяя сечение дросселя. За счет этого при следующем срабатывании сервопривода 4 скорость его возврата уменьшается и уменьшается модуль углового ускорения -6. Аналогичные срабатыва0 имя происходят до тех пор, пока -е не достигнет допустимого значения, определяемого зоной нечувствительности - шириной изолятора 17.
Если модуль -е мал, то контакт 18 к моменту опроса анализатора находится в зоне
5 контакта 15, и тэ, приняв значение «+1, поступает на элемент 9, который срабатывает, увеличивая сечение дросселя. За счет этого при следуюшем срабатывании сервопривода скорость его возврата увеличивает0 ся и увеличивается модуль -е. Аналогичные срабатывания происходят до тех пор, пока -е не достигнет допустимого значения, определяемого зоной нечувствительности - элемент 17.
После каждого срабатывания сервопри5 вода 4, а именно после окончания тэ, реле 7 подает импульс тю на вход привода 10, который при помощи штока 11 возвращает подвижный контакт 18 в исходное положение, подготавливая устройство к работе, к началу каждого последующего управляемого пово0 рота трактора.
Такши образом, контур управления угловым ускорением обеспечивает стабилизацию -е на уровне допустимого значения.
Формула изобретения
Устройство управления трактором, включающее соответствующий каждому механизму поворота трактора контур управления
направлением движения трактора, содержащий последовательно включенные чувствительный элемент, датчик, элемент формирования сигналов управления и сервопривод, выход которого подключен к входу механизма поворота трактора, и включающее контур управления угловым ускорением трактора, содержащий последовательно соединенные реле времени, анализатор и исполнительный элемент, выход которого подключен к входу регулирующего органа сервопривода, причем анализатор содержит акселерометр для установки на тракторе, подключенный к входу трехпозиционного блока с переключате
лем, отличающееся тем, что, с целью повышения точности автовождения, контур управления угловым ускорением трактора снабжен датчиком положения регулирующего органа сервопривода и возвращающим механизмом с исполнительным элементом, причем вход возвращающего механизма подключен к соответствующему выходу реле времени, а исполнительный элемент возвращающего механизма установлен с возмож- 0 ностью взаимодействия с переключателем трехпозиционного блока, кроме того, выход датчика положения регулирующего органа сервопривода связан с входом реле времени.
фиг 2
/ V
//
Риг. 3.
/
| Авторское свидетельство СССР № 1300822, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
