«
Изобретение относится к сельскоу хозяйству, в частности к автовож- ению сельскохозяйственных агрегаов ,
Цель изобретения - упрощение контрукции устройства.
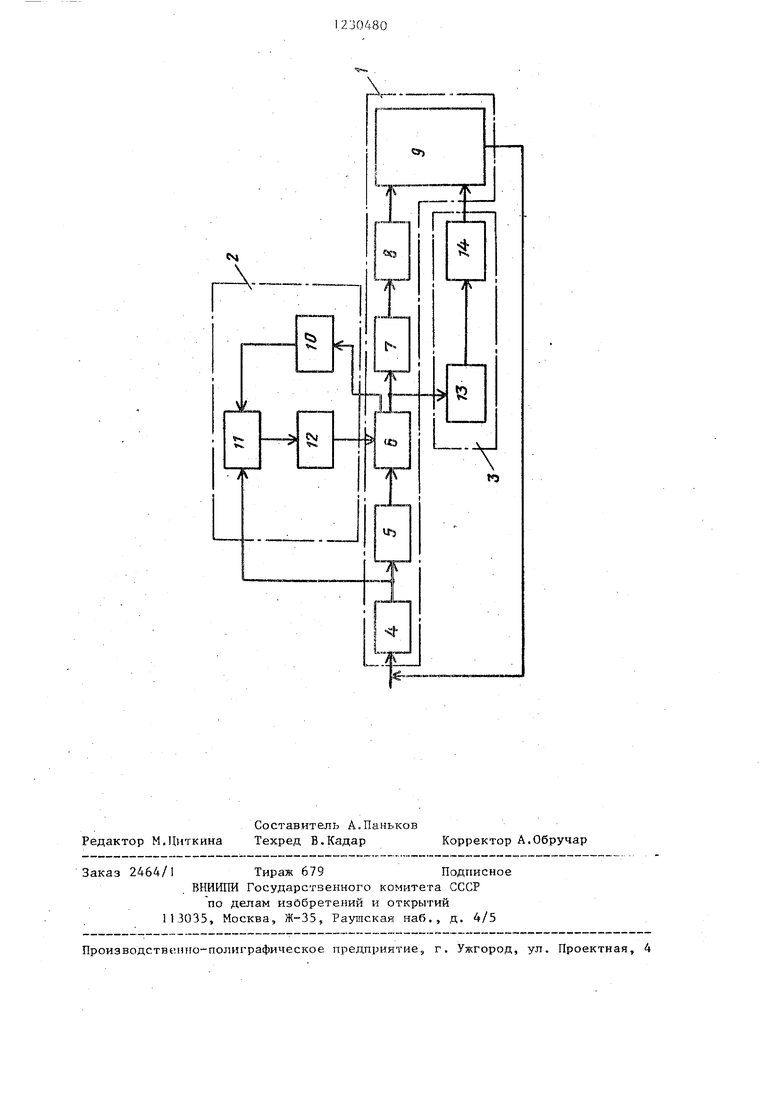
На чертеже представлена структурая схема для одного борта трактора (для другого . борта схема аналогича) ,
Устройство состоит из контура 1 правления, контура 2 самонастройки дополнительной цепи 3 управлени я.
Контур управления СОСТОИТ из увствительного элемента 4, датчика 5, импульсного элемента 6, звена задержки 7, сервопривода 8 и объекта 9 управления.
Звено задержки 7 выполнено в вие реле времени, обеспечивающего заержку окончания выходного сигнала импульсного элемента 6 без изменения начала поступления этого сигнала на сервопривод 8.
Контур самонастройки 2 состоит из импульсного элемента 10, анализатора П и исполнительного элемента 12,
Дополнительная цепь управления 3 состоит из звена задержки 13 и дополнительного сервопривода 14, связанного с объектом 9 управления.
Звено I3 задержки выполнено в виде реле времени, обеспечивающего задержку начала управляющего сигнала импульсного элемента 6 без изменения момента его окончания на выходе звена задержки 13.
Установка длительности задержки сигнала импульсного элемента 6 звеньями задержки 7 и 13 производится при изготовлении устройства и может корректироваться оператором в случае необходимости (профилактические на- стройки).
Длительность времени задержки звена задержки 7 определяется временем нозврата в исходное положение дополнительного сервопривода 14. .Длительность задержки сигнала звена задержки 13 устанавливается в зависимости от характеристик объекта 9 управления и для совремеи1шх гусеничных тракторов может быть принята в пределах 0,1-0,35 с, в зависимости от времени полного перемещения дополнительного сервопривода 14.
Сервоприводы 8 и i 4 выполняются в виде гидроэлектрозолотниковых устройств и гидроцилиндров. Гидроцилинд230480 ры
to
ts
20
25
тр во то се во Се не ме пн
со св но ме кл но а за 1 го с 12 до го Вх но хо но хо вх но го 9
ня ил ги не вы и ти ра вр ., уп да он Им си Зв ны на
ок
Та ющ
30
35
40
5С
55
во
дл эл на
3
s
0
5
связаны с механизмами гговорота трактора таким образом, что сервопривод 8 воздействует на планетарный тормоз (фрикцион), а дополнительный сервопривод 14 действует на остановочный тормоз механизма поворота. Сервоприводы 8 и 14 могут быть выполнены и в виде других исполнительных механизмов, например электроприводов, пневмоприводов и др,
Элементы 4-9 контура 1 управления соединены последовательно с обратной связью объекта на вход .чувствительного элемента 4. Вход импульсного элемента 10 контура 2 самонастройки подключен к одному из выходов импульсного элемента 6 контура 1 управления, а его выход подключен на вход анализатора . Другой вход анализатора 1 соединен с выходом .чувствительного элемента 4, а его выход соединен с входом исполнительного элемента 12, выход которого соединен с входом подстроечного органа импульсного элемента 6 контура 1 управления. Вход звена задержки 13 дополнительной цепи 3 управления соединен с выходом импульсного элемента 6 основного контура 1 управления, а выход звена задержки 13 соединен с входом сервопривода 14 дополнительной цепи управления, выход которого соединен с другим входом объекта 9 управления.
Чувствительный элемент 4 выполняется в виде механического копира или любого другого устройства, регистрирующего отклонения объекта от необходимого положения. Датчик 5 выполняет роль включающего элемента и имеет двухпозиционную характеристику. Здесь рассматривается один уп- равляе.-1ый борт трактора, при одновременном рассмотрении схем двух ., управляемых бортов характеристика датчика 5 превращается в трехпозици- онную с зоной нечувствительности. Импульсный элемент 6 преобразует сигнал датчика 5 в импульсный сигнал. Звено задержки 7 пропускает импульсный сигнал элемента 6 без изменения начала импульса и задерживает его
окончание на постоянное время L
о
Таким образом, длительность управляющего сигнала, поступающего на сер0
5
0
С
5
вопривод
равна Lg (+ LT,где
длительность управляющего импульса элемента 6; t, время задержки звена 7, Сервопривод 8 является ис3 1
полиительным механизмом цепи управления , Он воздействует на вход объекта 9 управления.
Импульсный элемент 10 контура 2 самонастройки соединен с другим выходом импульсного элемента бив момент окончания паузы элемента 6 вырабатывает импульсный сигнал постоянной длительности. Анализатор 11 представляет собой трехпозиционное устройство. Исполнительный элемент 12 выполняется в виде реверсивного . шагового двигателя или любого другого устройства, обеспечивающего соответствующую характеристику, иапри- мер вычислительного устройства, определяющего длительность импульса элемента 6 в соответствии с формулой
V-
гдели - постоянный 1те-20
риод времени, определяющий шаг настройки; п - количество сигналов, поступающих от анализатора 11 на элмент 12 с положительным знаком; га - количество сигналов, поступающих от анализатора 11 на элемент 12 с отрицательным знаком. Исполнительный эл.емент 12 соединен с подстроечным органом (не показан) импульсного элемента 6.
Вход звена задержки дополнительной цепи 3 управления соединен с выходом импульсного элемента 6. Звено задержки 13 задерживает начало прохождения импульсного сигнала элемента 6 на постоянное время . Таким образом, длительность управляющего импульсного сигнала, поступающего на дополнительный сервопривод 14, определяется выражением t -
Задержка окончания действия импульсного сигнала элемента 6 в контуре 1 управления звеном задержки 7 и задержка начала прохождения импульсного сигнала элемента 6 звеном задержки I3 обеспечивает необходимую последовательность срабатывания сервоприводов 8 и 14. Сначала включается сервопривод 8, затем,если длительность t, становится больше ь срабатывает сервопривод 14. В момент
ю(
20
35
25 JQ
,,
0
А 804
окоичапия действия управляющего импульса сначала отк: ючает.;я сервопривод 4, а затем сервопривод 8.
Предлагаемое устройство работает следующим образом.
При нормальной скорости поворота трактора, например при достаточно большом усилии па крюке, система работает как сам(настраивающаяся, так как величина V мала и меньше Г , поэтому сигнал па сервопривод 4 н.е проходит или его длительность недостаточна яля срабатывания сервопривода 14. Таким образом, дополнительная цепь 3 управления остается отключенной.
По мере y eньшeния уг ловоп скорости поворота трактора, например, за счет уменьи1еп){я крюкового устшия или увеличения момента сопротивления повороту трактора, происходит увеличение длительности импульса, элемента 6 за счет срабатывания контура 2 самонастройки. Когда величина его возрастает до такой степени, что длительность импульса элемента 6 станет больше времени запаздывания t,., звена задержки 13, в работу подключается дополнительный сервопривод 14, который начинает действовать на остановочный тормоз (другой вход) объекта, увеличивая угловую скорость поворота трактора. Трактор начинает управляться контуром 1 управления и дополнительной цепью 3 управления.
При работе дополнительной цепи 3 управления соблюдается необходимая очередность включения (сначала сервопривода 8, а затем 14) и очередность их отключения (сначала сервопривода 14, а затем сервопривода 8, контура 1 управления). Это достигается путем установки необходимого времени задержки Г и 1 звеньев задержки 7 и 13.
Таким образом, устройство обеспечивает режимы работы на основе принципа переменной структуры. При этом конструкция устройства и технология его изготовления значительно упрощается по сравнению с прототипом.
| Самонастраивающееся устройство автоматического направления движения трактора | 1983 |
|
SU1148580A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
