1
Изобретение относится к медицинской технике, а более точно к эндоскопическим приборам, и может быть испо;1ьзовано для исследования внутренних о)|-аноз био.югически.х объектов.
Известен эндоскоп, управ;1ение j)a6(j4CH частью которого осуществляется с (lOMonibK) электродвигателей. В Kopiiyce протипоположной рабочей части эндоскопа размещен привод, содержащий исг1о;1нительн1)1Й мсханиз.м --- электродвигатель с 11;естерней. передачумалая Н1естерня, снен-леннаи с зубчатыми рейка.ми, к которым ||рик)енле нь гибкие тяги, другим конц()м закрег Л1 г ные к рабочей части, механизм , в ниде двух электрических кнопок с микропереключателями 1 .
Недостатки указанно1() эндоскопа iiiioтивоположная рабочей часть тяжелая, объемная, отпустив кнонку вк;1К)чения. неясно. в какую сторону изогнута рабочая часть, не обходимо постоянно смогрет1 в окуляр )абота с таим нриводо.м уюмито.льиа. в одной илоскости.
Наиболее близким техническим к изобретению является волоко1Н1Ь Й эндоскоп, который содержит |)абочук) часть с управляемым )абочим KOinio:vi-o6i,eKT управления, противоио,:1ожнук) рабочей часть с корпусом, на котором ;)азме1иены окуля }, иснолнительный механизм с э.пектродвигателями, включение двигателей осупюствля ется э.чектрическими кнопками механизм управления, на которой размен1.ен HIKHB с закрепленной гибкой тягой. Нажимая гу или иную электрическую кнопку, во вран1ение тот и;1и игюй дви1атель. .из к корпусу 1р()тиво11оложно С) рабочей части подходит световодпый кабе;и; 2| .
Недостатками известной кгякм ()ка1-1и эндоскона являются из1иб 1,истально1() Ki)r:iia в одной плоскости, следо ате.;1ьн-о, надо поворачивать кисть руки, неу;;,об1к) .чс-р жать корпус противопо.южной )аб()чей чис ти, необходимо поддег жигип-ь eiii fiToixni рукой, увеличенный вес и за сче1 использования двух э..1ектро.твиг; 1е,1е с iie дукторами, инетрументальн1 и1 канал находится над лбом ог1ерато)а из-за )азме1иепия электродвигателей на стенке корпуса, устройства, которое показ1.ча.:к) бы в какую сторону и насколько изогнут д,иста,пьный конец, оператору надо постоянно помнить lia какую кнопку он нажимал и не отрына.ться (.IT окуляра, - все это утом.гяе оператора.
Целью изобретения яв;1яетея vMein i eiHte утомляе.мости оператора.
Указанная цель достигае ч:я тем, тго в волоконном эндоскопе, с()де)жап1см оку.тяр, корпуе, в котором расположен нривод с механизмом управления, рабочую часть, исно,тнительный механизм с электродвигателя.ми, гибкие тяги, элементы нередач . элементы
элс ктрического включения, размещенные на Kopifvce, и све1оводпый кабель, эндоскоп снабжен карданным подвесом с размещенным на нем индикатором положения меха ;.изма управления, установленным в корпусе CD стороны, пр(ггивоно;1ожной рабочей чаети, с возм-ожностью поворота, при этом исполнительный механизм с электродвигателями и э,1еме;1тами передачи подключен к световодному кабелю, а в последне.м размещены i ибкие Я1и, э.1еме1 ты нередачи и электропривод механиз.ча управления.
На нижней части индикатора положения .механизма управления под корпусо.м нанесена цветовая метка.
На фи1. изображен эндоскоп, общий
вид; fia фи1. 2 кинематиеская схема волокон нсло эндоскопа.
Вол(жо-нный эндоскоп, содержит рабочую ч;;с1ь 1 с )абочим концо.м 2, осветительным , наблюдательным 4 Ж1ута.ми и гибкими 5, корпус 6 противоположной рабочеГ iiacTH, внутри которой размещены передача 7, с донолнигельны.ми шкива.ми 8-11 1 дополнительными гибки.ми тягами 12-15, ..:1я) 16. и механиз.м 17 управления с карда1пн 1.м нодвесом 18, на котооро.м расположен индикатор п(.)ложения 19 с цветовой по.. 20, -электрическая кнопка 21, подпружиненная 1 ружиной 22 к 1наровой -оловке oci-i 2Л, и четыре микропереключателя 24, от )ых электрические провода 25 проходят
li еве()13од| ;ьн1 кабель 26 к электродвигате.ям 27 и 28 иснолнительпого механизма 29.
К рабочему конну 2 (объект управления) ПОДХОДЯ гибкие тяги 5, закрепленные на
шкивах 11е)едачи 7. Часть пгкивов передачи . )азм(Ч1КМ а в противоположно рабочей часги, а другая частьв корпусе исполнительного механизма 29, кинематически связан1И,х с электродвигателями 27 и 28. Шкиii})i передачи 7, )азмеп1енные в нротивоно,10/кпо рабочей части эндоскопа, расположеin..i нн одной оси с дополнительными 1нкиваMii 8 I, которые посредств(;м гибких тяг 12 ; связаны с индикатором положения 19 ()б ,ект уп;)авления содержит противопозак|1е| лепными iia нем гя1ами 5, с наблюдаюльпым Ж1уто 1 4, второй конец которого по.1ходит к окуля|)у 6. с световолоконным жгутом 3, который в световодный кабеь ь 26.
1ривс|Д. эн.и.чкопа С(.)держит механизм
/ ;.Правления, неоедачу 7, исполнительный механизм 29.
Механизм 17 управления содержит элект1;ическую кнонку 21. подпружиненную пружиной 22 к Н1аровой головке оси 23, которая закреплена )ia карданном нодвесе 18. Под электрической кнонкой 21, имею1дей кольцевую форму, размен1епы на нодвесе
18 четыре микропереключателя 24, так, чтобы их кнопки были расположены на взаимно перпендикулярных линиях и центр пересечения этих линий совпадал с центром оси 23, чтобы при нажатии на электрическую кнопку 21, она нажимала на кнопки включения микропереключателей 24, замыкая электрическую цепь как на каждый микропереключатель 24 отдельно, так и на два соседних, вызывая наклон объекта управления, противоположный рабочему конец 2, в ту или иную сторону, либо совершала сложное движение в двух направлениях. Электрические провода 25 от микропереключателей 24 проходят в световодный кабель 26 к электродвигателям 27 и 28 исполнительного механизма 29. Механизм 17 управления содержит также индикатор 19 положения, представляющий втулку, часть которой выступает над корпусом 6 проксимальной части, а другая часть размещена под корпусом 6 и закреплена на карданном подвесе 18. Когда индикатор 19 положения занимает начальное положение, т.е. конец 2 рабочей части 1 должен быть выпрямлен, то цветовая полоса 20, нанесенная на части индикатора 19 положения, размещенной под корпусом 6, не выступает над корпусом 6 и не видна, при других положениях рабочего конца 2 цветовая полоса 20 выступате над корпусом 6.
Исполнительный механизм 29 включает в себя электродвигатели 27 и 28 с редукторами, в котором они укреплены. Корпус исполнительного механизма 29 подключен к световодному кабелю 26, в нем световодный кабель 26 расщеплен на три жгута, которые идут к осветителю, на корпусе закреплены также муфты сцепления для передачи движения от электродвигателей 27 и 28 к шкивам передачи 7.
Передача 7 - механизм, осуществляющий управление от исполнительного механизма к объекту управления и согласование механизма управления с объектом управления. Передача 7 содержит шкивы, укрепленные на оси проксимальной части, шкивы, укрепленные в корпусе исполнительного механизма 29, гибкие тяги 5 между ними и рабочим концом 2, дополнительные шкивы 8- И, расположенные на этой же части оси, что и шкивы, расположенные в проксимальной части, дополнительные гибкие тяги 12-15, осуществляющие согласование с рабочим концом 2 - объектом управления, укрепленные на индикаторе 19 положения.
Волоконный эндоскоп работает следующим образом.
Корпус 6 (фиг. 1) противоположный рабочей части, размещеается в левой руке, правой рукой оператор вводит рабочую часть 1 (рабочая часть сверху покрыта эластичной оболочкой) в исследуемый прибор или изделие. Не отпуская правой руки от
рабочей части 1, указательным пальцем левой руки оператор нажимает на электрическую кнопку 21 механизма 17 управления, замыкая электрическую цепь включением микропереключателей 24, начинают вращаться оси электродвигателя 27 и 28 (либо оба вместе, если включаются два соседних микропереключателя 24, соответственно приходят в движение шкивы с тягами 5 передачи 7, вызывая отклонение рабочего конца 2,
так как дополнительные шкивы 8-11 расположены на одной оси со шкивами передачи 7, то и они синхронно с другими шкивами поворачиваются вокруг оси, вызывая натяжение гибких тяг 12-15, и осуществляя качания индикатора положения одновременно с поворотом рабочего конца 2. Отпуская палец с электрической кнопки 21, размыкаем электрическую цепь и фиксирует положение рабочего конца 2. Для того, чтобы вынуть рабочую часть 1 из изделия, необходимо,
чтобы цветовая полоса 20 индикатора положения не выступала над корпусом 6, т.е. индикатор 19 положения должен занять начальное положение.
Использование предлагаемого изобретения по сравнению с существующими конструкциями эндоскопов отечественных и зарубежных позволяет повысить эффективность его работы путем уменьшения веса, габаритов, утомляемости оператора, благодаря тому, что ме.ханизм управления снабжен индикатором положения, синхронно поворачивающи.мся с рабочим концом, размещенным на карданном подвесе, с нанесенной на индикаторе цветовой полосой, оператору ясно в каком направлении изогнут рабочий конец, изогнут или выпрямлен, благодаря тому, что в световодном кабеле размещены гибкие тяги передачи, электропровода механизма управления, что к световодному кабелю подключен исполнительный механизм. Двигатели исполнительного механизма вынесены за
пределы корпуса проксимальной части, находятся в корпусе исполнительного механизма, который размещён на подставке или столе, не мешая оператору работать, оператор не испытывает дополнительной нагрузг
г ки из-за размещения двигателей в противоположной рабочей части, которая может достигать 34% по весу, уменьшился объем корпуса противоположной рабочей части на 6%, что для работающего целый рабочий день имеет важное значение. В конце рабочего дня оператор утомляется, наличие индикатора положения с цветовой полосой дает ему возможность работать спокойно и без брака, здесь использована вторая сигнальная система человека - положение и цвет. Кроме того, конструкция эндоскопа технологична, доступна изготовлению на отечественном оборудовании в условиях крупносерийного производства, удобна в обращении
и эксплуатации, позволяет выполнить изгиб по всем направлениям, освободить вторую руку для поддержки рабочей части эндоскопа, эксплуатировать не только в качестве медицинского эндоскопа, повысить освещенность, а так же использовать для осмотра труднодоступных мест различных изделий, например в машиностроении.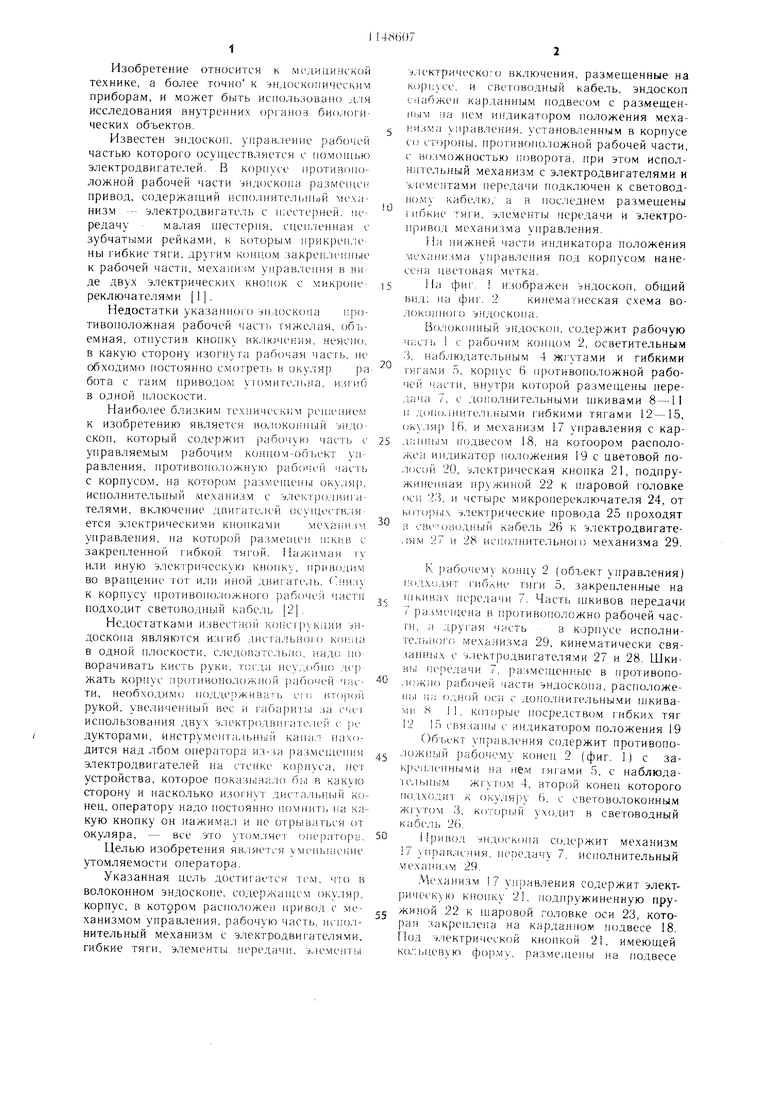
| название | год | авторы | номер документа |
|---|---|---|---|
| Волоконный эндоскоп | 1983 |
|
SU1375242A2 |
| Задающий механизм манипулятора | 1972 |
|
SU547337A1 |
| АВАРИЙНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ОПУСКАНИЯ ЛИФТОВ, ЗАСТРЯВШИХ МЕЖДУ ЭТАЖАМИ | 2004 |
|
RU2341440C2 |
| Устройство управления гибким эндоскопом | 1976 |
|
SU564856A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПОДЪЕМНОГО УСТРОЙСТВА И ПОДЪЕМНАЯ СИСТЕМА | 2007 |
|
RU2429185C2 |
| Гастроскоп | 1983 |
|
SU1173980A1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА | 2017 |
|
RU2752456C2 |
| ПОДЪЕМНИК ДЛЯ ПОГРУЖЕНИЯ ИНВАЛИДА В БАССЕЙН | 1993 |
|
RU2063376C1 |
| Привод протеза руки | 1976 |
|
SU614793A1 |
| МЕДИЦИНСКИЙ ДИАГНОСТИЧЕСКИЙ ПРИБОР СО СЪЕМНЫМИ ДИСТАЛЬНЫМИ НАСАДКАМИ | 2017 |
|
RU2689843C2 |
1. ВОЛОКОННБ1Й ЭНДОСКОП, содержащий окуляр, корпус, в котором расположен привод с механизмом управления, рабочую часть, исполнительный механизм с электродвигателями, гибкие тяги, элементы передачи, элементы электрического вклю 7-У чения, размещенные на корпусе, и световодный кабель, отличающийся тем, что, с целью уменьщения утомляемости оператора, он снабжен карданным подвесом с размещенным на нем индикатором положения механизма управления, установленным в корпусе со стороны, противоположной рабочей части, с возможностью поворота, при этом исполнительный механизм с электродвигателями и элементами передачи подключен к световодному кабелю, а в последнем раз мрщены гибкие тяги, элементы передачи и электропривода механизма управления. 2. Эндоскоп по п. 1, отличающийся тем, что, на нижней части индикатора положения механизма управления под корпусом нанесена цветовая метка. J J9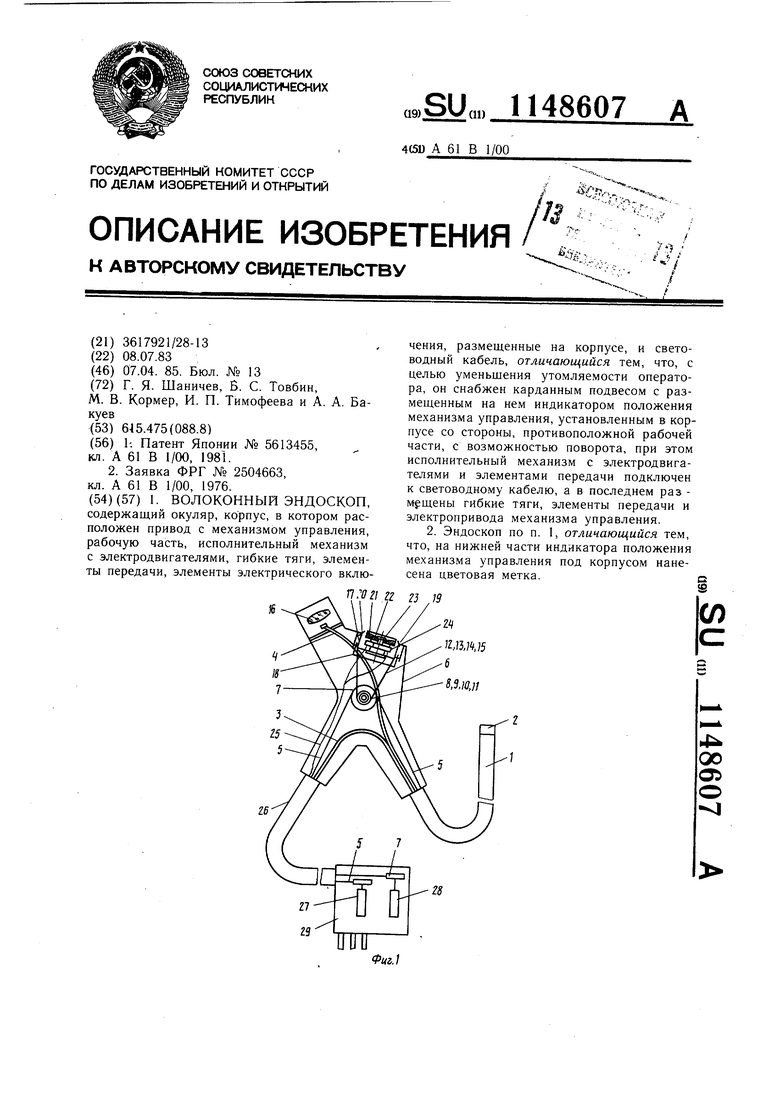
19
Фиг.г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент Японии № 5613455, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ТУРБИНА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2012 |
|
RU2504663C2 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
