Изобретение относится к устройствам авто матического управления и может найти примененке в системах автоматического регулирования нестационарными объектами при наличии больших изменений внецших возмущеЦель изобретения - увеличение точности работы регулятора. На фиг. 1 представлена блок-схема предлагаемого нелинейного адаптивного регулятора. Регулятор содержит элемент 1 сравнения, первый сумматор 2, усилитель 3, интегратор 4, второй сумматор 5, задатчик 6, нелинейные звено 7, блок 8 деления и блок 9 оценки среднего значения. Усилитель 3 представляет собой усилитель . с управляемым коэффициентом усиления. Нелинейное звено 7 реализует один из нели нейных законов: Ке) е-, F(t)-e Регулятор работает следующим образом. В регуляторе реализуется следующий закон управления: ,(e.F(,)f)k,(e))ji, о где (J(t - входная координата объекта рег лирования; - сигнал рассогласования, равный e-x,-v(t) ,- регулируемая выходная координата объекта и ее заданное зна чение; Т - постоянная времени- интегрирова ния; К| - перестраиваемый коэффициент у ления регулятора; F() - выходная величина нелинейного звена (определяется типом нели нейности) ; Выходной сигнал объекта регулирования УН) и сигнал X 3 задатчика 6 сравнивают ся на элементе 1 сравнения. Полученный си нал рассогласования Б поступает на вход сумматора 2, а также на вход нелинейного звена 7. Выходной сигнал с нелинейного звена 7 суммируется с сигналом рассогласования на сумматоре 2. Выходной сигнал сумматора 2 усиливается управляемым усилителем 3 и подается на вход интегратора 4 и на сумматор 5. На сумматоре 5 образуется суммарный сигнал с усилителя 3 и с интегратора 4, ко торый подается на вход объекта регулирования. Следовательно, в регуляторе реализуется нелинейный изодромный закон управления, характеристика нелинейного закона определяется типом нелинейного звена, которое выбирается исходя из дишмических свойств объек та регулирования (степени его нелинейности). При малых значениях сигнала рассогласования величина на выходе нелинейного звена 7 мала (или равна нулю) по сравнению с величиной рассогласования 6 на выходе элемента 1 сравнения и не оказывает влияния на работу регулятора. При увеличении сигнала рассогласования на выходе элемента 1 сравнения величина сигнала на выходе нелинейного звена начинает расти быстрее, чем сигнал рассогласования, что приводит к интенсивному изменению выходной величины регулятора (J (t) и быстрому устранению появившегося возмущения в объекте регулирования. Коэффициент усиления управляемого усилителя выбирается из условия отсутствия автоколебаний в установившемся режиме, а параметры интегрирующего звена выбираются из условия отсутствия перерегулирования при больших значениях сигнала рассогласования. В процессе работы коэффициент усиления (объекта регулирования может изменяться в широких пределах, поэтому необходимо корректировать коэффициент усиления регулятора в зависимости от изменений коэффициента усиления объекта регулирования. Для этого определяется среднее значение входной величины объекта МГ 11()1 на блоке оценки среднего значения 9, на вход которого подается сигнал с выхода сумматора 5, равный входной величине объекта , На входы блока 8 деления подаются сигналы с задатчика бис выхода блока 9 оценки среднего значения, при этом па выходе блока 8 деления образуется сигнал равный коэффициенту усиления объекта регулированиялСаи) где К gg - коэффициент усиления объекта регулирования; . X - заданное значение выходной координаты объекта; 14()1 - среднее значение входной координаты объекта. Выходной сигнал с блока 8 деления подается на управляющий вход управляемого усилителя 3 и изменяет его коэффициент усиления так, что большему значению коэффициента усиления объекта регулирования соответст311871484
вует меньший коэффициент усиления регуля-При определении коэффициента усиления
тора (усилителя 3), и наоборот.объекта регулирования в качестве выходной
Такая коррекция коэффициента усиления ре- значение УЗ сигнал с задатчиком 6, а не гулятора позволяет подцерживатъ высокую точ- j X{i которое колеблется в области устаноность работы регулятора при широком диапа- . вившегося значения (в области ). зоне изменений коэффициента усиления объек-Это позволяет избегать автоколебаний в
та регулирования,установившемся режиме.
величины объекта использовано ее заданное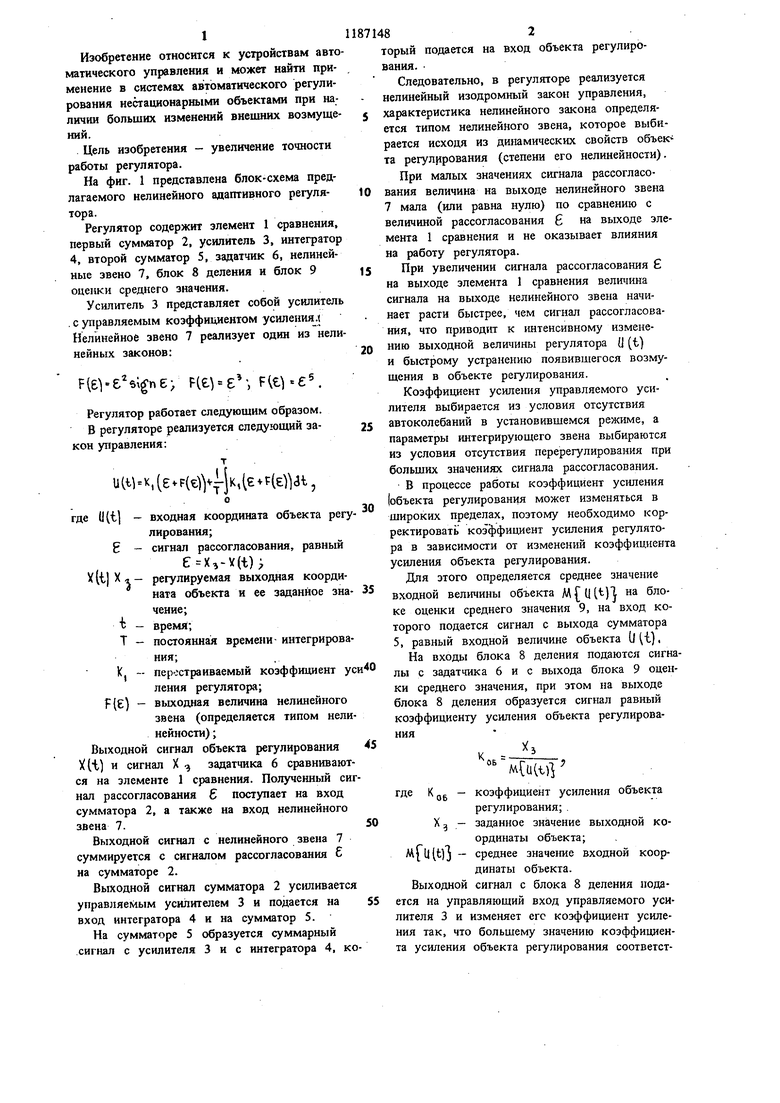
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный адаптивный регулятор | 1985 |
|
SU1303994A1 |
| Нелинейный адаптивный регулятор | 1986 |
|
SU1374177A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| Адаптивный регулятор | 1984 |
|
SU1149213A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1126926A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
НЕЛИНЕЙНЫЙ АДАПТИВНЫЙ РЕГУЛЯТОР, содержащий последовательно соединенные элемент сравнения, первый суммаxlt) i тор, усилитель, интегратор и второй сумматор, первый вход элемента сравнения соединен с выходом задатчика, а выход усилителя подключен к второму входу второго сумматора, отличающийся тем, что, с целью повышения точности работы, он снабжен нелинейным звеном, блоком деления и блоком оценки среднего значения, а усилнтель выполнен регулируемым по усилению, причем выход элемента сравнения подключен к входу нелинейного звена, выход которого соединен с вторым входом первого сумматора, выход задатчика подключен к первому входу блока деления, выход второс го сумматора через блок оценки среднего значения подключен к второму входу блока сл деления, соединенного выходом с управляющим входом усилителя. 00 4: 00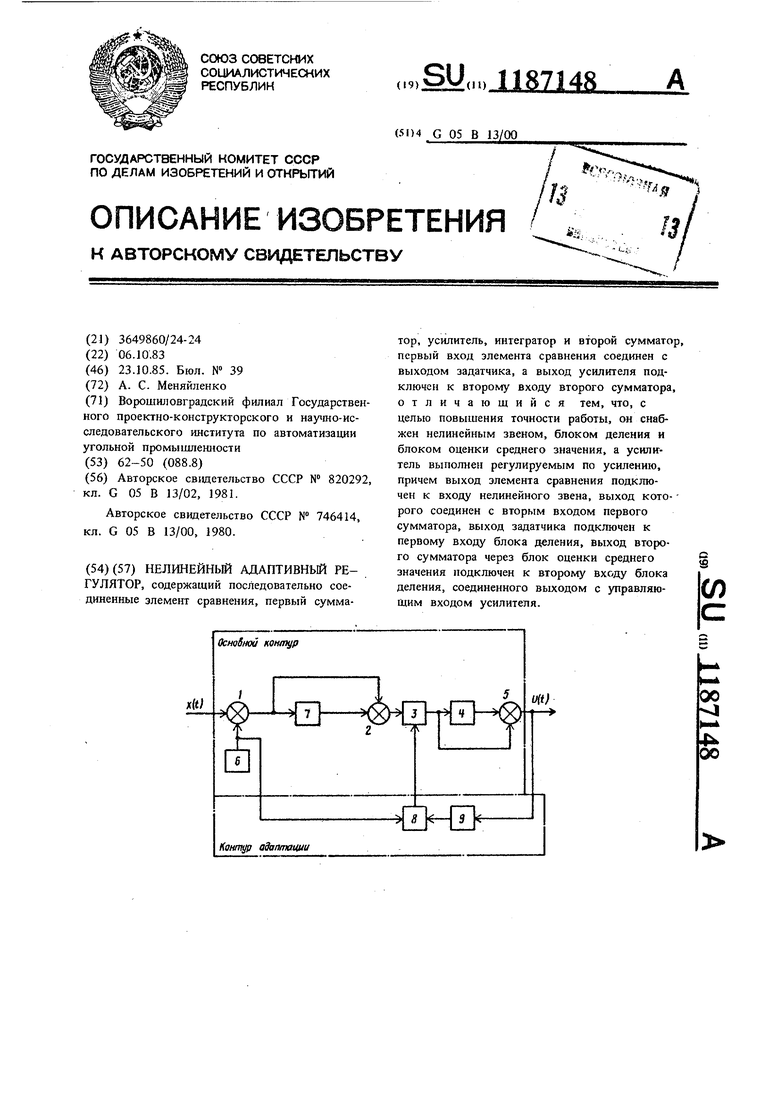
| Машина для сшивания сетного полотна | 1976 |
|
SU820292A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Адаптивный регулятор | 1977 |
|
SU746414A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
