I
Изобретение относится к микроэлектронике и может быть использовано для программного управления установксц м сборки изделий .элек.тронной техники, например интегральных схем (ИС).
Известны устройства для управления производством ИС, позволяющие в автоматическом режиме разваривать, т.е. присоединять проволочные выводы к конкретным площадкам кристалла и выводной рамки ИС 11-и 2.
Недостатком этих устройств являются узкие функциональные возможности .
НаиС5олее близким техническим решением к предлагаемому изобретению является устройство для управления установкой присоединения проволочных выводов, содержащее командный блок и два идентичных канала координат X н Y, в состав каждого из которых входят счетчики импульсов, блок программы, цифроаналоговые преобразователи, аналоговые ключи, блок сравнения, одним входом соединенный с выходом цифроаналогового преобразователя, вто1шм
входом - с выходом сумматора, а выходом .подключенный на один из входо блока шагового привода, причем аналоговый ключ одним входом подключен к выходу потенциометра угловой коррекции другого канала,, вторым, входом - к выходу цифроаналогового преобразователя, третьим входом - к третьему выходу командного блока,, а выходом соединен, с одним из входо сумматора, второй вход.которого соединен с выходом аналогового ключа, входы которого соединены паргшлельно соответствующим в.ходс1М аналогового ключа и подключены первыми и вторыми входами к выходам цифроаналогового преобразователя, третьими входами ко второму выходу блока програмлал, первый выход которого соединен со входом .цифроаналогового преобразователя, причем выходы аналогового ключа подключены ко входам потенциометра угловой коррекции, а командный блок в каждом канале входом подключен на выход.блока шагового привода, .первым выходом ко входу счетчика импульсов, вторым выходом - ко входу счетчика импульсов, четвертым выходом - ко входу блока шагового привода, а пятым
выходом - ко входу блока программы 3 .
.Известное устройство осуществляет присоединение лроволочных выводов к контактным площадкам кристалла и выводной рамке ИС в автоматическом режиме по заданной программе, причем кристалл может иметь неточную посадку по координатам (X-Y) и разворот по углу относительно заданного положения. Оператором производится ввод поправок по координатам и по углу, после чего выход инструмента в реальные точки сварки производится с учетом этих поправок и без участия оператора, т.е. в автоматическом режиме.
Указанное устройство имеет тот недостаток, что, решая задачу авто матического програьадного управления установкой, оно не дает точности вывода сварочного инструмента в заданную точку координат. Это обусловлено применением значительного количества аналоговых токовых ключей, обладающих статической ошибкой при коммутации разнополяриого напряжения или тока, а также применением большого числа цифроаналоговых преобразователей различного типа, вносящих также свою погрешность.
Цель изобретения - упрощение уст ройства.
Поставленная цель достигается тем, что в двухкоординатное устройство для прогтраммного у правления, содержсвцее блок команд и в каждой координате первый цифроангшоговый преобраэователь, блок программ, первый счетчик, второй счетчик, подключенны входом к первому выходу блока команд, последовательно соединенные ключ, сумматор и блок сравнения, второй вход которого соединен с шлходом второго цифроансшогового преоразователя, выход .- с первым входом шагового привода данной координаты, и блок коррекции, выход которого по ключен к первому входу ключа другой координаты, соединенного вторым входом со вторым выходом блока ксмланд, третий выход которого подключен ко входу блока програмиш, а четверть) выход и вход - соответственно, ко второму входу и выходу шагового привс)да данной координаты, в каждую кЬррдинату введены преобразователь кодд, элемент ИЛИ и коммутатор, выход которого соединен со входом вто рого цифроаналогового преобразователя данной координаты, первый вход - с выходся второго счетчика данной координаты, второй вход - со вторьв) выходом блока команд, а.третий выход - через лервый счетчик с выходом элемента ИЛИ данной координаты, подключенного- входами к первому и пятому выходам блока команд, причем в каждой координате.вход
первого цифроаналогового преобразовтеля через преобразователь кода сое динен с выходом блока программ, а соответствующие выходы -. со входами блока коррекции и вторым входом сумматора данной координаты.
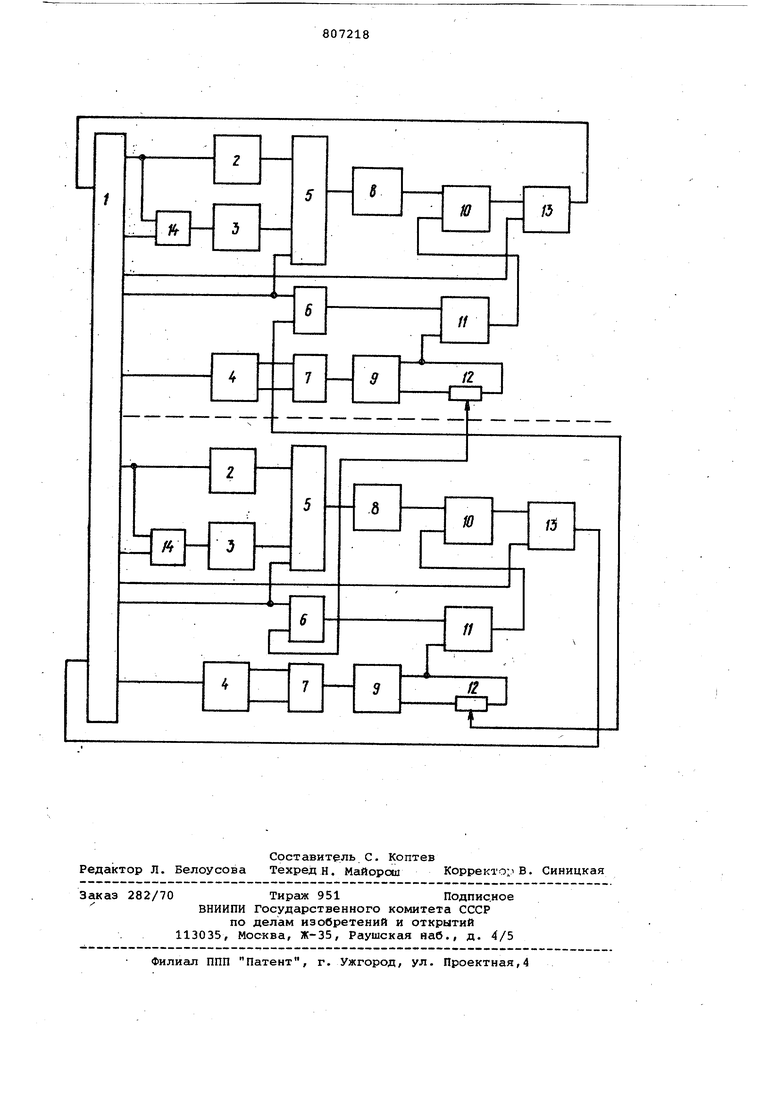
На чертеже изображена блок-схема устройства.
Устройство содержит командный блок 1 и две координаты (X и У),кё1Ждая из которых состоит из второго 2 и первого 3 счетчиков блока 4 программ, коммутатора 5, ключа б, преобразователя 7 кода, второго 8 и первого 9 цифроаналогового преобразователя, блока 10 сравнення, сумматора 11, блока 12 компенсации,выполненного в виде потенциометра угловой коррекции, шагового привода 13 и элекюнта ИЛИ 14.
Устройство работает следующим образсяш.
Блок 4 задает в двоично-десятичнсяи коде координату X точки сварки, а также знак координаты, которая т| ансформируется преобразователем 7 в двоичный код, а преобразователем 9.- в напряжение. Преобразователь 9 имеет прямой и инверсный выходы, сигналы с которяа1Х поступают на входы блока 12, причем прямой сигнал (аналоговое значение координаты) одноврёьюнно поступают на сумматор 11. С выхода блока 12 снимается сигнал равный по величине напряжению произведения координаты X точки сварки (на кристалле) на угол d. sind% i для малых углов сосОответвуняций углу разворота кристала относительно положения згщаииого по программе. Этот сигнал является поправкой к координате ортогонального направления, поэтому он проходит через ключ 6 и сумьшруется с аналоговым значением координаты У. Поправка по углу, вырабатываемая в канале координаты Y, подается на сумматор 11 канала X аналогичным образом через ключ 6 канала X.
Элемент ИЛИ 14 позволяет вводить в счетчик 3 поправку.по линейной координате. Счетчик 2, как и счетчик 3, считает импульсы тактового генератора привода 13. Счетчики 2 и 3 подключены через коммутатор 5, управляе1«1й.блоком 1, к преобразователю 8, превращающему цифровую ин формацию, находящуюся в выбранном счетчике импульсов, в аналоговую форму (в напряжение).
Блок 10 сравнивает напряжение, соответствующее.значению координаты адреса, т.е. координаты, заданной блоком с текущей координатой, т.е. координатой, в которой находится сварочный инструмент, приводимый в движение приводом 13. Кроме того, блок 10 управляет включением и вы|Ключением привода 13 и задает направление перемещения по координате
В исходном состоянии положение сварочного инструмента совпадает с начальной точкой, относительно которой баданы координаты точек сварки кристалла и рамки. Счетчики 2 и 3 также находятся в начальном состоянии . Оператором производится совмещение оптической метки-перекрестия, совпадающей с положением инструмен.та, с координатaiei первой точки (сварки на кристалле, при этом в счетчик 3 через элемент ИЙИ 14 вводится iпоправка по координате. Ввод поправ;ки по углу разворота осуществляется при повороте подвижной оптической системы метки-перекрестия до положения, при котором линии метки становятся параллельными осям симк(етрии кристалла. Наличие №ханической связи между оптической. системойГ и по т0нциометрами угловой коррекции обеспечивает требуемое .значение поправки по углу. Командой с выхода блока 1 опрашивается первая координата, заданная в блоке 4, преобразуется в двоичный код преобразователем У, а преобразователем 9 - в напряжение, подается на сумматор 11 и в блок 12.
В случае отработки координаты кристалла поправка с блока 12 канала Y поступает через ключ 6 на сумматор 11 канала X. В канале Y происхдит аналогичное действие. Одновременно с командой считывания координаты происходит запуск приёода 13, при этом на его выходе возникают иквтульс считываемые одновременно счетчикагш 2 и 3. Коммутатор 5 в этом случае, подключает счетчик 2 к преобразователю 8, имеющему на выходе напряжение, соответствующее изменяющейся текущей координате, представленной в цифровом виде в счетчике 2. В момгнт совпадения двух напряжеиий блок 10 выключает. привод 13,. констатируя факт выхода.инструмента в заданную точку.
Следующей командой блок 1 опргшшвает координату выводной рамки,Процесс отработки происходит так же, ка и для точки кристалла, только в том случае ключ 6 отключает.блок 12 от сумматора 11, а коммутатор 5, подключает счетчик 3, в котором находится по линейной, координате. Величина перемещения, будет в этом случае больше или меньше.значения, заданного блоком 4, в зависимости, от значения поправки.по линейной координате. Так как поправка по линейным координатам вводится один раз в один из счетчиков импульсов, а в далнейшем счетчики 2 и 3 считывают импульсы синхронно, то поправка сохраняется в течение всего цикла разварки кристалла, присутствуя в виде раз
IOCTH между числом импульсов в счетчиках 2 и 3.
Устройство обеспечивает повышение реальной точности попадания сварочного инструмента е заданную точку координат на два-три шага, т.е. на 20-30 микрон по сравнению с установкой мод.505, что обусловлено уменьшением количества цифроаналоговых преобразователей и аналоговых ключей, обладающих статической ошибкой в преобразовании и переключении аналоговых сигнашов.
Формула изобретения
Двухкоординатное .устройство для программного управления, содержащее блок команд и в каждой координате первый цифроаналоговый. преобразователь, блок программы, первый счетчи второй счетчик, подключенный входом к первому выходу блока команд, послдовательно соединенные ключ, сумматор и блок сравнения,, второй вход которого соединен с выходом второго цифроаналогового преобразователя, выход - с первым входом шагового привода данной координаты, и блок коррекции, выход которого подключен к первому входу ключа другой координаты,соединенного вторым входом со вторым выходом блока команд, третий
Ш:1ХОД которого ПОДКЛЮЧвН КО ВХОДУ
блока програмввл,. а четвертый выход . и вход - соответственно ко второму входу и выходу шагового привода данной координаты, отличаю щ.ее с я тем, что, с целью упрощения устройства, в него в .каждую координату введены преобразователь кода, элемент ИЛИ и коилвутатор, выход которого соединен со входом второго цифроаналогового преобразователя данной координаты, первый вход с выходом второго счетчика данной координаты, второй вход .- со вторым выходом блока команд, а третий выход - через первый счетчик с выходо элемента ЮШ данной координаты, подключенного входами к первому и пятому выходам блоке1 команд,причем в каждой координате вход первого цифроаналогового преобразователя через преобразователь.кода соединен с выходом блока программ, а соответc-TByvsa e выходы - со входами блока коррекции и вторым входом сумматора данной координаты.
Источники информации, принятые во внимание при экспертизе
1. Патент США 3776447, кл. 228-3, опублик. 1974.
2i Патент США О 3773240, кл. 228-4, опублик. 1977.
3. Схема управления установки мод.505 Хельмут Сайер, Швейцария, 1974 (прототип)
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатное устройство для программного управления | 1979 |
|
SU881673A2 |
| Двухкоординатное устройство для программного управления | 1979 |
|
SU881672A2 |
| Двухкоординатное устройство для программного управления | 1984 |
|
SU1193644A2 |
| Устройство для двухкоординатного программного управления | 1979 |
|
SU860007A1 |
| Устройство для вывода информации на экран электронно-лучевой трубки | 1977 |
|
SU1029177A1 |
| Система для автоматического числового управления координатными перемещениями при обработке изделий микроэлектроники | 1990 |
|
SU1835534A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство для вычисления массы нефти и нефтепродуктов в резервуарах | 1983 |
|
SU1117653A1 |
| Устройство для программного управления | 1981 |
|
SU976428A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |