(54) УСТРОЙСТВО ДЛЯ ДВУХКООРДИНАТНОГО ПРОГРАММНОГО УПРАВЛЕНИЯ
1
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах автоматического числового программного управления координатными перемещениями испытательных органов, в частности, для установок присоединения проволочных выводов с автоматическим вводом коррекции о положении кристалла.
Известны устройства для двухкоординатного управления, содержащие блок в-вода программы, преобразователь код-напряжение, устройство сравнения , усилитель, двигатель IJ.
Однако данные устройства не позволяют корректировать программу при неточной посадке кристалла относительно траверс выводной рамки при использовании его в установке присоединения проволочных выводов.
Известна установка модели 505 фирмы Хельмут Сайер (Швейцария), позволяющая в автоматическом режиме по заданной программе раз варить,, т.е. присоединить, проволочные выводы к конкретным площадкам кристалла и к выводной рамке ИС, причем кристалл может иметь неточную посадку по координатам и разворот по углу относительно заданного положения.
Однако процесс коррекции по координатам X и У и углу производится оператором вручную..
Наиболее близким к предлагаемому по технической сущности является двухкоординатное устройство для программного управления, содержащее два канала, каждый из которых содержит блок привода, компаратор, сумматор, аналоговый ключ, блок коррекции, а также систему формирования текущей координаты и блок программа. Данное устройство управления позволяет корректировать программу при неточной посадке кристалла относительно траверс выводной рамки 2j.
Однако в известном устройстве процесс коррекции по координатам X и У и углу производится также оператором вручную.
Цель изобретения - расширение функциональных возможностей устройства, позволяющее автоматизировать процесс коррекции по координатам X и У и углу .
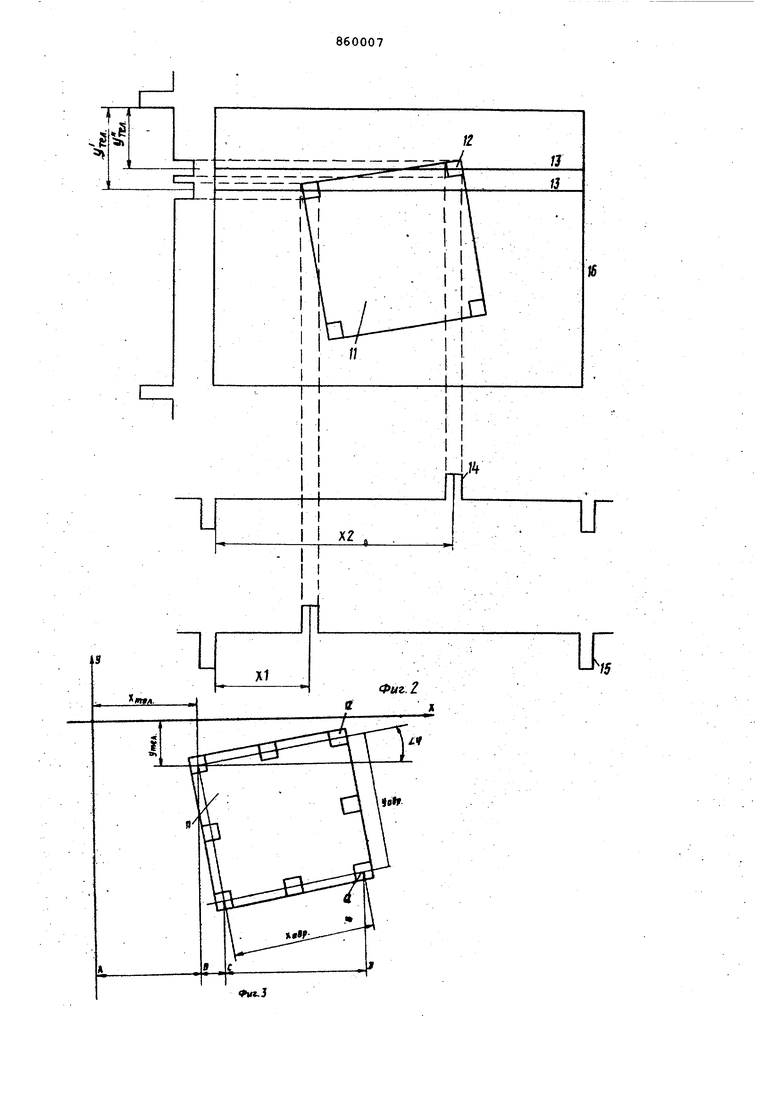
Поставленная цель достигается тем, что Б устройство для двухкоординатного программного управления, содержащее в каждом канале блок коррекции и последовательно соединенные блок программы, сумматор, бл9к сравнения, блок привода и блок текущей координаты, выходом соединенный со вторым входом блока сравнения, а второй вход сумматора подключен к выходу блока коррекции, введены телевизионный датшк положения и логический блок, первыми входами соединенный с выходами телевизионного датчика положения, вторым входом - с выходом блока программы одной из координат, а первым выходом - с третьим входом сумматора в каждом канале, вторым выходом - с первыми входами блока коррекции в каждом канале, вторые входы которых подключены к выходам блока програмNfci соответствующего канала. Кроме того, логический блок содержит три триггера, последовательно Соединенные тактовый генератор, первый элемент И, первый счетчик и первый цифроаналоговый преобразователь, последовательно соединенные ВТОРОЙ элемент И, второй счетчик и второй цифроаналоговый преобразователь, а также последовательно соединенные третий элемент И, реверсивный счетчик, третий цифроаналоговый преобразователь и делитель, второй вход которого соединен со вторым входом логического блока, первые входы первого, второго и третьего элементов И соединены с выходами первого, второг и третьего триггеров соответственно, первый вход первого триггера подключен ко вторым входам второго и тоеть го элементов И и к первому входу логического блока, второй вход первого триггера - к первому входу второго триггера, второй вход которого соединен с первым входом третьего триггера и с первым входом логического блока. На фиг. 1 приведена функциональна схема устройства для двухкоординатно го программного управления на фиг.2 криста11Л и телевизионная строка виде сигнала; на фиг. 3 - кристалл, смещенный по координатам; на фиг. 4-- то ж в поле зрения телевизионного датчика на фиг. 5. - функциональная схема логического блока. Устройство содержит два канала 1 и 2 (фиг. 1), каждый из которых соде жит последовательно соединенные блок 3 программы, сумматор 4, блок 5 срав нения, блок 6 привода, блок 7 текуще координаты, выход которого подключен ко второму входу блока 5 сравнения, блок 8 коррекции, своим выходом подключенный ко второму входу сумматора 4, выход блока 3 программы каждого канала соединен со входом блока 8 кор рекции противоположного канала, посл довательно соединенные телевизионный датчик 9 положения и логический блок 10, первый выход которого подключен к третьему входу сумматора 4 канала ВТОРОЙ - к третьему входу сумматора 4 второго канала 2, а третий выход ко вторым входам блоков коррекции каналов 1 и 2. На фиг. 2-4 обозначены: кристалл 11, контактные площадки 12, строки 13, видеоимпульсы 14, синхроимпульс 15 и растр 16. Телевизионный датчик 9 подключен к блоку 10 посредством шин 17-20, а блок 3 программ (фиг. 1) - к блоку 10 посредством шины 21 (фиг. 5). Блок 10 (фиг. 5) содержит тактовый генератор 22, RS-триггеры 23-25, третий,первый и второй элементы И 26-28, реверсивный счетчик 29, первый счетчик 30, второй счетчик 31, третий цифроаналоговый счетчик 32, первый цифроаналоговый счетчик 33, второй цифроаналоговый счетчик 34, делитель 35, выходные щины 36-38. Устройство для двухкоординатного программного управления работает следующим образом. При помощи телевизионного датчика 9 (фиг. 1} оптическая информация об истинном положении объекта на плоскости, в данном случае полупроводникового кристалла 11 (фиг. 2) интегральной схемы) преобразуется в электрический телевизионный сигнал, который затем поступает на обработку в блок 10 (фиг. 1). в блоке 10 определяются координаты положения и угол поворота кристалла 11 относительно телевизионного датчика. Оптическое изображение кристалла 11 интегральной схемы представляет собой чередование светлых и темных участков изображения. В качестве информационных участков изображения приняты контактные площадки 12(фиг, 2) кристалла 11. Телевизионный сигнал - это чередование строк 13от кадра к кадру. Каждая строка телевизионного сигнала начинается и заканчивается строчным синхроимпульсом 15 и пересекает поле изображения по горизонтали, заполняя весь кадр по вертикали, образуя телевизионный растр 16. Строка телевизионного сигнала пересекает изображение кристалла 11. В месте, где она пересекает контактную площадку 12, появляется видеоимпульс 14. Для определения положения кристалла достаточно определить координаты двух контактных площадок 12 кристалла 11. Координаты площадок 12 определяются от начала строки и от начала кадра до видеоимпульса первой и второй контактных площадок. Полученные координаты используются для определения угла поворота кристалла 11 относительно начала координат. Кристалл 11 (фиг. 3) смещен по координатам X и У и углу Vповорота вокруг центра координат. Для того, чтобы обойти все точки сварки, необходимо знать новые коор- . динаты какой-либо точки кристалла 11 и угол поворота вокруг этой точки.
ная адресные координаты всех остальных точек, можно определить истинные координаты каждой из этих точек относительно начала координат. Адресные координаты-это координаты всех точек сварки кристалла 11 относительно одной из них, хранящиеся в блоке 3 программы (фиг. 1), например, адресные координаты контактной площад- ки 12 (фиг. 3) обозначены как X др и др Чтобы переместить инструмент :В точку CJ необходимо определить координаты У , и Уддри угол ч поворота кристалла 11. Координата точки d представляет собой выражение
X АВ + ВС + СД (1)
Отрезок АВ представляет собой отрезок ВС Ус1др91ИЧ отрезок СД - Хддр. Последнее равенство справедливо для углов поворота кристалла 11 менее или равных пяти гращусам. Значит выражение (1) можно записать в виде
+ Of - (2)
тел -of счАР - 25 Здесь УОДР и ХОДР известны и хранятся в блоке 3 программы, и &1И определяются в блоке 10 поправок (фиг. 1).
Блок 10 работает следующим обра- .. зом.
С телевизионного датчика 9 (фиг, 1) по шийе 17 (фиг. 5) на S-вход RSтриггера 24 поступает строчный синхронизирующий импульс 15 . 2), на . выходе триггера 24 (фиг. 5) устанавливается уровень логической единицы, и элемент И 27 начинает пропускать импульсы с выхода генератора 22 на вход счетчика 30. По шине 1В с выхода телевизионного датчика на R- вход 40 RS-триггера 25 поступает электрический сигнал от первой контактной площадки кристалла, который устанавливает на выходе RS-триггера 24 (фиг.5) уровень логического нуля, элемент и j 27 закрывается и счетчик 30 фиксирует число, соответствующее координате . (фиг. 4). С выхода телевизионного датчика по шине 19 на S-вход RSтриггера 25 (фиг. 5) поступает кадро-JQ вый синхронизирующий импульс, который . устанавливает на выходе RS-триггера .. 25 уровень логической единицы, и элемент И 28 начинает пропускать на вход счетчика 31 строчные синхронизирующие импульсы. На R-вход RS-триггера 25 55 по шине 18 поступает электрический сигнал 14 от первой контактной площадки кристг1Ш1а, которой устанавливает на выходе RS-триггера 25 уровень логического нуля, элемент И 28 закрывает- JO ся, и счетчик 31 фиксирует число, соответствующее координате Уте (фиг.4).
Реверсивный счетчик 29 (фиг. 5). определяет разницу между координатами y-rtfc- На сумкмрующий вход счетчи- 5
ка 29 с выхода элемента И 2и поступают строчные синхронизирующие импульсы, соответствующие координате Утел, а на вход вычитания счетчика 29 через элемент И 26 поступают строчные синхронизирующие импульсы, соответствую-, щие координате Утел Элемент И 26 управляет RS-триггер 23, на S-вход которого поступает кадровый синхронизирующий импульс, а на R-вход по шине 20 с выхода телевизионного датчика - электрический сигнал 14 (фиг. 2) крайней контактной площадки кристалла. Информация о разности координат У-тел и через цифроаналоговый преобразователь 32 (фиг. 5) поступает на первый вход делителя ЗЬ, на его вход по шине 21 с выхода блока 3 программ (фиг. 1) поступает информация об адресной координате Хддр(фиг. 3), соответствующая расстоянию между первой и крайней площадками.
Полученный результат, соответствующий Sinif (фиг. 3) , по шине 28 (фиг. 5) поступает на входы блока 8 коррекции (фиг. 1) обоих каналов. Информация ХуелИ У тел о координатах с выходов счетчиков 30 и 31 (фиг. 5) соответственно через цифроаналоговые преобразователи 33 и 34 по шинам 36 и 37 поступает на входы сумматоров 4 (фиг. 1) первого и второго канала.
Блок 8 корррекции может быть выполнен, например, в виде умножающего цифроаналогового преобразователя, на информационный вход которого с выхода блока 3 программ (фиг. 1) поступает адресная координата, а на вход опорного сигнала - сигнал с выхода делителя 35, величина которого соответствует синусу угла поворота кристалла. Блок 3 коррекции производит операцию умножения адресной координаты, например и синуса угла поворота кристалла ЛР . Полученный результат есть приращение координаты X в Каждой точке адресной координаты
У. Полученное приращение суммируется с адресной координатой истинного положения кристалла 11 (фиг. 3).
После сравнения информации блока 7 текущей координаты и сумматора 4 блок 5 сравнения выдает команду на перемещение в блок б привода (фиг. 1). Информации, о координатном положении привода в любой момент времени с вы-, хода блока 7 текущей координаты поступает на второй вход блока 5 сравнения. При равенстве-координат, поступающих с выхода сумматора 4 и блока 7 текущей координаты, блок 5 выдает команду Стоп, в результате чего, положение привода соответствует сумме адресной координаты и поправки истинного положения кристалла.
Применение предлагаемого устройства для двухкоординатного программного управления позвод яет автоматически корректировать программу обхода координат точек сварки кристалла интегральной схемы при его неточной посадка по координатам/ что позволяет повысить производительность за счет сокращения времени на коррекцию программы. Формула изобретения 1. Устройство для двухкоординатн го программного управления, содержащее в каждом канале блок коррекции и последовательно соединенные блок програм1 и, сумматор,блок сравнения, блок привода и блок текущей координаты, выходом соединенный со вторым входом блока сравнения, а второй вход сумматора подключен к выходу блока коррекции, отличающе с я тем, что, с целью расширения. функциональных возможностей устройства, в него введены телевизионный датчик положения и логический блок, первыми входами соединенный с выходами телевизионного датчика положения, вторым входом - с выходом бло ка программы одной из координат, а первым выходом - с третьим входом сумматора в каждом канале, вторым выходом - с первыми входами блока K рекции в каждом канале, вторые входы которых подключены к выходам блока программы соответствующего канала. 2. Устройство ПОП.1, отличающееся тем, что, логический блок содержит три триггера, последовательно соединенные тактовый генератор, первый элемент И, первый счетчик и первый цифроаналоговый преобразователь, последовательно соединенные второй элемент И, второй счетчик и второй цифроаналоговый преобразователь, а также последовательно соединенные третий элемент И, реверсивный счетчик, третий цифроаналоговый преобразователь и делитель, второй вход которого соединен со вторым входом логического блока, первые входы первого, второго и ipeTbero элементов И соединены с выходами первого, второго и третьего триггеров соответственно, первый вход первого триггера подключен ко вторым входам второго и третьего элементов И и к первому входу логического блока, второй вход первого триггера - к первому входу второго триггера, второй вход которого соединен с первым входом третьего триггера и с первым входом логического блока. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 549788, кл. G 05 В 19/18, 1976. 2.Авторское свидетельство СССР по заявке 2516045/18-24, кл. G 05 В 19/18, 1977 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат контактных площадок кристалла | 1984 |
|
SU1203553A1 |
| Двухкоординатное устройство для программного управления | 1984 |
|
SU1193644A2 |
| Двухкоординатное устройство для программного управления | 1979 |
|
SU881673A2 |
| Двухкоординатное устройство дляпРОгРАММНОгО упРАВлЕНия | 1977 |
|
SU807218A1 |
| Устройство для программного управления процессом сборки интегральных микросхем | 1982 |
|
SU1151928A1 |
| Устройство для ввода-вывода информации | 1983 |
|
SU1155097A1 |
| Двухкоординатное устройство для программного управления | 1979 |
|
SU881672A2 |
| Устройство для селекции элементов контура изображений объектов | 1987 |
|
SU1441426A1 |
| Автомат для присоединения проволочных выводов полупроводниковых приборов | 1987 |
|
SU1481871A1 |
| Устройство двухкоординатного позиционирования | 1985 |
|
SU1288653A1 |